Professional Documents
Culture Documents
Entre Ga Final
Uploaded by
Almotriota LatinoamericanistaCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Entre Ga Final
Uploaded by
Almotriota LatinoamericanistaCopyright:
Available Formats
CURSO: SISTEMAS NO LINEALES
- UNIVERSIDAD DE LOS ANDES -
PROYECTO FINAL: Mtodo de control
Backsteeping en sistema de potencia SMIB (Single
Machine Innite Bus)
Alexander Molina Cabrera
Email:a.molina10@uniandes.edu.co
I. INTRODUCCIN
El crecimiento de los sistemas elctricos (debido a incremento de valores de carga,
puntos de conexin y tamao del mismo) ha devenido en que operen con mrgenes de
estabilidad mnimos. sta operacin puede provocar que el sistema ingrese a zonas inseguras
de operacin; en ste sentido, los sistemas de transmisin que salgan de la operacin segura
pueden tener dicultades como; cadas de tensin, prdida de sincrona, oscilaciones de
frecuencia etc. Ahora; un problema mayor se presenta si en tal sistema, en su estado
de vulnerabilidad, se presentan fallas de gran porte como por ejemplo; salidas de lneas,
salida degeneradores, fallos a tierra o entre lneas. As las cosas, no slo se presentara un
deterioro en las magnitudes de las seales sino que el sistema objeto de anlisis perdera
toda funcionalidad debido a su apagn general.
Para tratar de enfrentar el problema de la inestabilidad en los sistemas elctricos
algunos autores sugieren el uso de tcnicas lineales para el control de la frecuencia y de los
valores de tensin [13]. Sin embargo, tales tcnicas han sido empleados con mediano xito
1
en zonas de operacin jas, es decir; se han aplicado mayormente en sistemas linealizados.
Las tcnicas usuales lineales se emplean para PSS, AVR [3]. En eventos provocados por
grandes perturbaciones como las mencionadas (fallos a tierra entre otras) aquellas tcnicas
lineales tienen enormes limitaciones. Es por lo anterior que se plantea la pregunta a resolver;
es posible emplear tcnicas que sean funcionales para puntos diferentes al punto de
operacin de referencia en sistemas de transmisin?. Lo anterior, de acuerdo a la literatura,
tiene respuesta positiva y tiene hacidero en la existencia de tcnicas no lineales de control
para sistemas fsicos. Se descrive brevemente que la tcnica denominada Backsteeping
puede ser empleada con stos propsitos.
Existe literatura que describe las bases para la implementacin de la estrategia de
control Backsteeping en sistemas de transmisin. El propsito de la estrageia mencionada
es el de mejorar la estabilidad transitoria en respuesta a grandes perturbaciones como con
las fallas a tierra. ste control posibilita incluir el anlisis de realimentacin de variables
del sistemas, as como vincula el anlisis de Lyapunov.
Para vericar el funcionamiento de la tcnica se implementar en un sistema Single
Machine Innite Bus (SMIB) y se compararn con resultados con una tcnicas lineal.
Una vez vericada la fortaleza de la estrategia es posible extender su uso a sistemas
multimquina; sin embargo, ya el tratamiento puede tornarse complejo dado el incremento
de variables a que puede verse sujeto el modelo.
El documento en su seccin II presenta el sistema a controlar. En la seccin III
se presenta la metodologa junto con algunos ejemplos. Ya en la seccin IV se implementa
en el sistema SMIB y se presentan resultados.
II. MODELO DEL PROBLEMA
Los sistemas elctricos generalmente se componen de sistemas de transmisin
que conectan a los grandes centros de consumo y las centrales generadoras. Como se ha
mencionado, el crcimiento de stos sistemas elctricos hace complejo su anlisis. Uno de
los mayores temores por parte de los operadores es la prdida de la estabilidad del mismo
con la consiguiente prdida de funcionalidad. Por considerarse de mayor importancia, el
anlisis de la estabilidad del sistema elctrico parte del anlisis de la mquina generadora,
2
Figura 1. Ilustracin del sistema Multimquina. Tomado de [9]
Figura 2. Esquema del sistema SMIB. Elaboracin propia.
pues de sta depende en gran medida el comportamiento del sistema. La operacin en
conjunto de varias generadoras se ilustra en la gura 1.
El anlisis multimquina de forma conectada ofrece ciertas dicultades. Es por lo
anterior que se ha procurado la simplifcacin del modelo general de la mquina cuando se
trata del anlisis de una de ellas. El modelo simplicado es denominado modelo de Single
Machine Innite Bus o SMIB. Tal modelo permite centrar el anlisis en la mquina y la
forma como sta se relaciona con el conjunto del sistema. Ahora, la simplicacin surge
porque se considera que la mquina simple no podra modicar drsticamente la tensin o
el ngulo de la tensin del sistema. As las cosas, el sistema al que se conecta la mquina
se le atribuye la caractersica se ser un bus innito idealizado al que estan conectadas todas
las centrales generadoras y las cargas del sistema elctrico de potencia. La gura 2 ilustra
la simplicacin del sistema de potencia para el anlisis de la mquina sncrona.
Para avanzar en el modelamiento es preciso analizar el circuito del sistema SMIB.
Tal circuito se ilustra en la gura 3.
La ecuacin de oscilacin considera la aceleracin en la mquina y establece que
la responsable de sta aceleracin es la diferencia entre el torque mecnico y el torque
3
Figura 3. Circuito simplicado de la mquina sincrona en el esquema SMIB. Elaboracin propia.
elctrico as:
J
dw
dt
= T
a
T
a
= T
m
T
e
Donde J es la inercia de la mquina; w es la variacin angular de la mquina ; T
a
hace
referencia al torque acelerante; T
m
es el torque mecnico ejercido por la turbina sobre
el eje de la mquina; T
e
es el torque elctrico producido debido al freno en la mquina
al circular corriente por la misma debido a la presencia de carga. Es claro que cuando
el torque mecnico es igual al torque elctrico entonces la mquina ni se acelera ni se
frena. La mquina bien puede acelerarse por la disminucin de carga, lo que implicara
que momentneamente el torque mecnico fuese mayor que el torque elctrico. Por otro
lado, si la carga aumenta el torque acelerante se hace negativo implicando una reduccin
en la velocidad de la mquina.
Luego de la manipulacin de los trminos de la anterior ecuacin, y con el adecuado
uso de factores de escala se obtiene la siguiente representacin en por unidad.
2H
W
0
d
2
dt
2
= P
mpu
P
epu
P
epu
=
E
p
E
B
X
t
sin()
Donde en la anterior relacin: es el ngulo de referencia de la mquina con
respecto al ngulo de la barra innita P
mpu
es la potencia mecnica ejercida por la turbina
4
sobre el eje de la mquina en valor por unidad; P
epu
es la potencia elctrica en por unidad
inyectada por el generador; E
p
es la tensin en la mquina generadora; E
B
es la tensin de
la barra innita; X
T
es la impedancia equivalente de las lneas, transformador y lo existente
entra la mquina generadora y la barra innita. Cuando existen fallos en las lneas, ste
valor se ve afectado sbitamente. En el anlisis de fallas ste valor es el que cambia dentro
de las simulaciones.
As las cosas, si la entrada es la potencia mecnica y la seal de salida es el
ngulo de la mquina que determina el ujo de potencia, podemos reescribir lo anterior de
la siguiente forma:
= w
w =
W
0
2H
P
mpu
E
p
E
b
W
0
2 X
t
H
sin()
Reescribiendo lo anterior puede tenerse la siguiente representacin.
x
1
= x
2
x
2
= au Cfsin(x
1
)
Donde
= x
1
w = x
2
a = W
0
/2H
C
f
= E
p
E
b
W
0
2 X
t
H
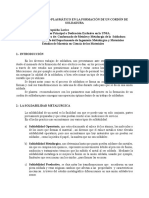
El modelo as descrito presenta el diagrama de fase que se ilustra en la gura
4. La simulacin permiti vericar que efectivamente frente a entradas nulas pero con
condiciones iniciales diferentes de cero el sistema oscila. La representacin de las rbitas
cclicas se reejan en oscilaciones en el tiempo que se ilustran en la gura 5 y que se
obtienen de simulink.
5
y
x=y
y=-103*sin(x)
-25,
-20,
-15,
-10,
-5,
0,
5,
10,
15,
20,
25,
x
-2,5 -2 -1,5 -1 -0,5 0 0,5 1 1,5 2 2,5 3 3,5 4
Figura 4. Diagrama de fase del sistema bajo estudio. Sistema SMIB
Figura 5. Oscilaciones del ngulo de la mquina con valores diferentes de cero para sus condiciones iniciales
El anterior modelo no lineal y no amortiguado se usar en la seccin IV .
6
III. METODOLOGA Backstepping
III-A. Breve Descripcin Histrica
La metodologa de control no lineal denominada Backstepping permite abordar
el problema del diseo de controladores mediante el uso de la ya clsica realimentacin
de variables de estado y el uso de funciones de Lyapunov para determinar parmetros
de controlador. En el proceso, se vinculan leyes de control no lineales que permiten dar
robustz al sistema controlado.
Uno de los primeros artculos que abre la posibilidad del empleo de la tcnica
en cuestin es el trabajo de Isidori y presentado en [2]. Aqu, los autores presentan una
serie de ejemplos de sistemas cuyas seales de control se obtienen mediante realimentacin
no lineal de los estados del mismo, particularmente en su artculo describen tcnicas de
control donde la entrada se obtiene a partir de las derivadas de Lie en sistemas con grado
relativo 1. De acuerdo con la literatura, otros trabajos similares fueron presentados por
Sontag, Sussman, Koditshek entre los aos 88 y 90; stos trabajos no fueron consultados.
Posteriormente en el artculo [16] se presenta la forma de estabilizar sistemas que combinan
sistemas parcialmente lineales; la seccin probablemente mas interesante es la seccin 3
de tal artculo pues es en la que se presenta el anlisis generalizado de las condiciones
necesarias para estabilizacin global; as mismo, se presenta la forma en la que se incluye
la funcin de Lyapunov que termina usndose para determinar las restricciones a considerar
de forma que se mantenga la estabilidad. El anlisis detallado se la restriccin de Lyapunov
se presenta en la seccin 4.
Ya en 1991 se plantea de forma mas sistemtica la estrategia Backstepping con
los trabajos de Kokotovic. En su documento titulado The Joy of Feedback: Nonlinear and
Adaptive el seor Kokotovic explica claramente, a partir de un sistema de orden 3, los
pasos para obtener las seales de control no lineales que permitirn la estabilzacin global
del sistema no lineal que se quiera tratar. Avanza hasta proponer el Backstepping robusto y
adaptivo para llegar al observador Backstepping en la parte nal de su documento tutorial,
[10]. Un ao despus, ste genial autor junto con Kanellakopoulos y Morse, presentan un
trabajo en el que de forma rigurosa e intuitiva obtienen resultados para el control de sistemas
no lineales. En el mismo documento se expone de manera amplia el el procedimiento para
el diseo de control Backstepping en el problema de regulacin y en su parte nal hacen
7
un pequeo anlisis del poder de tal controlador en tracking o seguimiento, [7].
Ya en 1995, en el libro de Kokotovic, Kanellakopoulos y Krstic se efecta
una descripcin clara, amplia y lo sucientemente didctica como para lograr mayores
claridades acderca del uso de la tcnica, de las posibilidades. Se discuten sucientemente
las cancelaciones de no linealidades, el posible uso de la tcnica para evitar cancelar no
linealidades amortiguantes; as mismo se expone, en una serie de ejemplos, el empleo de la
metodologa y se compara con resultados de Feedback Linearization, ver el documento [11].
Posteriores trabajos de Krstic y Kokotovic profundizan en Passivity y Backstepping adaptivo
estocstico. Ya en lo bsico de la tcnica, en 1999 emerge un pequeo documento a manera
de tutorial por los seores Fonssen y Strand de ABB en Noruega, [4]. En ste documento
recogen el tratamiento dado en [11] pero comeeten ciertos errores en la representacin
grca de los sistema a trabajar y sto puede llevar a confusiones al lector. Por lo dems,
dentro de ste documento se avanza desde la inspiracin del Backstepping hasta llegar al
tratamiento de sistemas MIMO y control de Navos, todo lo anterior es logrado con un
adecuado uso de teoremas y pruebas matemticas.
III-B. Breve descripcin de Backstepping
La motivacin se plantea, para efectos del presente trabajo, considerando un sistema
simple sobre el cul se har el anlisis. Partimos de la existencia de un sistema de primer
orden y como se muestra;
x
1
= f(x
1
) (1)
ste sistema en (1) puede ser aumentado mediante una nueva variable de estado
que se incluye; x
2
. sta variable de estado x
2
es el resultado de integrar una seal de
control de valor u y que es denida como una especie de seal de control virtual para
el sistema en (1), de aqu que clsicamente sta tcnica reciba el nombre de Integrator
Backstepping. El nuevo sistema aumentado tomar la forma siguiente:
x
1
= f(x
1
) + x
2
(2)
x
2
= u (3)
8
Lo que se propone la metodologa es hacer que los valores de variables de estado
lleguen a ser nulos cuando el tiempo t . Adicionalmente es necesario comentar que
x
2
procurar estabilizar al sistema presentado en (1) y que a su vez se procurar encontrar
una seal para u que permita la estabilizacin de x
2
. Lo inmediato anterior permite que se
logre hablar de un mtodo recursivo para estabilizacin de sistemas no lineales.
Luego de tener aquel sistema en (2) y (3), se procura conseguir un nuevo sistema en
z
1
y z
2
. ste nuevo sistema se detalla en la literatura y puede verse como un difeomorsmo.
De forma recursiva se inicia el tratamiento y anlisis sobre la ecuacin (2) para luego pasar
a la ecuacin (3) del sistema en dos etapas. Para el caso de sistemas de mayor orden, el
anlisis recursivo se efecta tantas veces como sea el orden del sistema.
Anlisis de la etapa 1 sobre la variable x
1
: En sta primera etappa se dene, para la
construccin del difeomorsmo, a z
1
= x
1
. sto as permitir la construccin de nuevas
ecuaciones, basados en la ecuacin (2) y con la forma que se ilustra a continuacin:
x
1
= f(x
1
) + x
2
(4)
z
1
= x
1
(5)
z
1
= f(x
1
) + x
2
(6)
Tal como se comentaba anteriormente, la entrada x
2
permitir que z
1
logre
estabilizarse siendo una especia de entrada virtual. Ahora, el documento tutorial [4] sugiere
el uso de la seal para x
2
as:
x
2
= (x
1
) + z
2
(7)
As, la ecuacin (2) toma nuevamente la forma que se ilustra a continuacin:
z
1
= f(x
1
) + ((x
1
) + z
2
) (8)
Ahora; para que (x
1
) cumpla su cometido, debe cumplir con lo siguiente:
Eliminar la no linealidad
Incluir a z
1
para cumplir GAS.
9
As; el valor de (x
1
), basado en (7) toma la forma siguiente:
(x
1
) = f(x
1
) + a
11
z
1
(9)
Ahora, al reemplazar la ecuacin (9) en (8), se obtiene:
z
1
= f(x
1
) + (f(x
1
) + a
11
z
1
) + z
2
(10)
z
1
= a
11
z
1
+ z
2
(11)
Se denomina a (x
1
) la funcin de estabilizacin.
Anlisis de la etapa 2 sobre la variable x
2
: Basado en la expresin (7), se obtiene por
despeje lo siguiente para z
2
:
z
2
= x
2
(x
1
) (12)
Derivando a ambos lados de la ecuacin se tiene:
z
2
= x
2
(x
1
) (13)
Usando el valor de la ecuacin (3) para x
2
y reemplazando en la ecuacin (13) se tiene lo
que sigue.
z
2
= u (x
1
) (14)
Ya con lo anterior, podemos denir un valor de u que permita construir una
expresin para z
2
tal que el sistema z
1
y z
2
en su conjunto cumpla GAS. As, es que
la seal de control toma la siguiente forma:
u
= (x
1
) z
1
+ a
22
z
2
(15)
Reemplazando lo anterior en la expresin para z
2
se tiene:
z
2
= ( (x
1
) z
1
+ a
22
z
2
) (x
1
) (16)
z
2
= z
1
+ a
22
z
2
(17)
10
Finalmente el sistema en z toma la forma siguiente:
z
1
= a
11
z
1
+ z
2
(18)
z
2
= z
1
+ a
22
z
2
(19)
Inclusin de restriccin de Lyapunov: Los valores de a
11
y a
22
deben cumplir los
criterios establecidos por Lyapunov. El anlisis se efecta sobre el sistema en z.
La funcin de Lyapunov puede tomar la forma que se presenta:
V = z
T
Pz (20)
Donde la Matriz P puede tomar la forma siguiente:
V =
P
11
0
0 P
22
V = p
11
z
2
2
+ p
22
z
2
2
(21)
Para que cumpla, los valores de p
11
; p
11
deben ser positivos diferentes de cero.
Adicionalmente, se cumple con sto que V (z) > 0D {0} con D R
2
.
Entonces, calculando valores se puede obtener
V , usamos valores de las expresiones
(18) y (19):
V = 2p
11
z
1
z
1
+ 2p
22
z
2
z
2
(22)
V = 2p
11
z
1
(a
11
z
1
+ z
2
) + 2p
22
z
2
(a
11
z
1
+ z
2
) (23)
V = 2p
11
a
11
z
2
1
+ 2p
11
z
1
z
2
2p
22
z
1
z
2
+ 2p
22
a
22
z
2
2
(24)
(25)
Si en la Matriz P se cumple que p
11
= p
22
= 1/2 entonces el valor para
V toma
la forma siguiente:
V = a
11
z
2
1
+ a
22
z
2
2
(26)
11
De la expresin anterior se colige que para que se cumpla
V < 0 entonces debe
cumplirse que a
11
= k
1
a
22
= k
2
con k
2
k
2
> 0. Con stos valores planteados se
cumple que
V < 0z
1
, z
2
D {0}. As, Lyapunov permite encontrar valores adecuados
para las constantes del proceso.
Ya con todo lo descrito en la etapa 1, 2 y en la etapa de cumplimiento de Lyapunov,
es posible plantear los valores de las constantes nales que hacen que la seal de control
funcione para el sistema descrito. Es necesario mencionar que la seal de control u se
calcula para el sistema original. Los valores toman la siguiente forma:
u = (z
1
) z
1
k
2
z
2
(27)
(x
1
) = f(x
1
) k
1
z
1
(28)
z
1
= x
1
(29)
z
2
= x
2
(x
1
) (30)
El sistema en Z toma la forma siguiente:
z
1
= k
1
z
1
+ z
2
(31)
z
2
= z
1
k
2
z
2
(32)
Es claro que el sistema tendr polos as:
1,2
=
1
2
(
(k
1
k
2
)
2
4 (k
1
+ k
2
)) (33)
Y de la anteriior relacin se obtiene que
1,2
tendr Re{} > 0 con k
1
k
2
< 1 ;
condicin que nunca se cumplir dado que previamente se establece que los valores de k
1
y k
2
deben ser positivos.
III-B1. El seguidor Backstepping: El anlisis inicia con el sistema tratado en las
ecuaciones (2) y (3).
x
1
= f(x
1
) + x
2
(34)
x
2
= u (35)
Para ste sistema la salida es el valor y = x
1
. En ste caso, podemos denir un
error basado en lo siguiente:
12
e = y y
d
(36)
e = x
1
y
d
(37)
(38)
Y al derivar los dos lados se tiene:
e = x
1
(39)
Tambin puede establecerse que x
1
= e+y
d
. Ahora, el nuevo sistema con el anlisis
del error para efectos de tracking es el siguiente:
e = f(x
1
) + x
2
(40)
x
2
= u (41)
Usando los resultados de las ecuaciones (27) hasta (30) y (37) es posible comentar
lo siguiente:
u = (z
1
) e k
2
z
2
(42)
= f(e) k
1
z
1
(43)
z
2
= x
2
(z
1
) (44)
z
1
= e (45)
e = x
1
y
d
(46)
III-C. Ejemplo de uso de Backstepping en sistemas no lineales
Para efectos de vericar de forma temprana la metodologa se implementar en
la regulacin y seguimiento de seal de referencia para un sistema estndar con f(x
1
) =
sin(x
1
). El sistema implementado en simulink se muestra en la gura 6, as mismo en
la gura 7. Para obtener resultados se usaron las expresiones (27) a (30) con valores
k
1
= k
2
= 10.
13
Figura 6. Regulador no lineal usando backstepping. Implementacin en simulink
Figura 7.
la implementacin del seguidor se implement para el mismo sistema. Para obtener
la seal de control se us las ecuaciones (42) a (46). Puede observarse el montaje en
simulink en la gura 8. As mismo se hace el anlisis considerando valores diferentes para
las constantes. En la gura 9 los valores usados para las constantes fueron de 10. Cuando
se implement el sistema de conrtol con valores de constantes mas elevados se not una
disminucin del error, esto as comentado puede verse en la grca 10. Lo anterior debe
14
considerarse para el diseo de controladores que requieran mayor precisin.
Figura 8. MOntaje en simulink del seguidor de seal
Figura 9. Seguimiento de la seal de salida frente a una seal de referencia sinusoidal
15
Figura 10. Comparativo de errores. La lnea amarilla es error con k = 20. En l+nea violeta error con k = 40.
IV. BACKSTEPPING EN CONTROL DE POTENCIA EN SISTEMA SMIB
IV-A. Trabajos previos
El control del ujo de potencia en los sistemas elctricos ha sido tratado por algunos
autores que enfocan su trabajo en tcnicas para sistemas lineales, lo anterior por la necesidad
de mantener mrgenes de operacin seguros y estables para los sistemas elctricos [13].
El abordaje del problema siempre parte de la linealizacin de los sistemas alrededor de
un punto de operacin. Varias estrategias se presentan en [12] y son fundamentalmente
tcnicas no lineales.
Un tratamiento intersante recibe el control de sistemas elctricos en el artculo de
Jain en 1993, [6]. En l, el autor emplea control adaptivo no lineal basado en Feedback
Linearization marcando as la pauta para desarrollos posteriores que motivan el uso de
tcnicas no lineales y anlisis sosticado de estabilidad de los sistemas elctricos. En [17],
Wang et all plantean la posibilidad de usar realmente el uso de controladores no lineales
mediante el empleo de Direct Feedback Linearization en el control de la excitacin y de
la potencia mecnica de las mquinas generadoras. En tal artculo los resultados que se
exponen dan cuenta de las posibilidades del control no lineal. Los resultados se hacen
basados en simulaciones onde se modela una mquina generadora conectada a una barra
innita. Hasta aqu los autores, aunque usan modelos no lineales, mantienen moderada la
comlejidad del problema dado que se emplean las tcncias sobre sistemas simplicados de
mquina innita y bus innito.
16
Didier Georges y sus colaboradores en Grennoble empiezan a efectuar combina-
ciones de la metodologa no lineal y las clsicas estrategias de control de tensin, [15]. El
propsito de su trabajo es mejorar la estabilidad transitoria y la regulacin de los niveles de
tensin. Para conseguir ste objetivo usan de forma conjunta la estrategia de Backstepping
junto con AVR. Los resultados obtenidos con Backstepping y sus combinaciones superan
enormemente a los ofrecidos por el uso de Direct Feedback Linearization an combinado
con otras tcnicas clsicas. ste artculo es quiz el primero en emplear la tcnica de control
no lineal objeto de estudio en sistemas elctricos de potencia.
Algunos otros trabajos posteriores aportan en la medida que involucran mayores
descripciones de las caractersticas de las seales de control para el sistema SMIB, [1]. Se
destacan particularmente los trabajos que Feliachi y Karimi efectan conjuntamente con
Choudry, pues abren las posibilidades del emeplo de la tcnica en mencin en aplicaciones
sosticadas como lo son: control de sistemas multimquina y control de dispositivos de
ujos de potencia mediante SVC. Es una nota importante dado que la complejidad del
problema multimquina se empieza a tratar casi 8 aos despus de la aparicin del artculo
de Georges de 2001. El alcance de ste trabajo no llega al anlisis multimquina, sin
embargo se efectu el acercamiento a los desarrollos hecho en stos artculos, [9]- [8].
IV-B. El diseo de la estrategia
El sistema SMIB se modela tal como se ilustr en la seccin 2 del documento.
Lo que se pretende es encontrar los valores de potencia mecnica (seal de entrada u)
que permitan hacer que el ujo de potencia desde el nodo Slack hasta la barra innita se
comporte de la forma que se desea. sta . Nuevamente el sistema puede mostrarse como
sigue:
x
1
= x
2
(47)
x
2
= au Cfsin(x
1
) (48)
En el sistema anterior las constantes expuestas toman los valores del documento
[14].
17
E
p
= 1,05 (49)
E
b
= 1 (50)
W
0
= 314,159 (51)
X
t
= 0,4 (52)
H = 4 (53)
a = W
0
/(2 H) (54)
C
f
=
E
p
E
b
W
0
2 X
t
H
(55)
(56)
Ahora, para que el sistema mantenga la forma estndar con la que se desarroll la
metodologa hacemos un cambio de variable como sigue:
u = au (x
1
) (57)
Con los valores as:
(x
1
) = Cfsin(x
1
) (58)
As, el sistema toma la siguiente forma:
x
1
= x
2
(59)
x
2
= u (60)
Puede verse aqu que f(x
1
) no tiene un valor. Ahora, redeniendo las variables
para efectuar seguimiento debemos considerar lo siguiente:
= y y
d
(61)
y = x
1
(62)
= x
1
y
d
(63)
(64)
18
De sta forma las ecuaciones de control (42) a (46) toman la nueva forma as:
u = (z
1
) k
2
z
2
(65)
(z
1
) = f(e) k
1
z
1
= k
1
z
1
(66)
z
2
= x
2
(z
1
) (67)
z
1
= (68)
= x
1
y
d
(69)
IV-C. Implementacin del esquema de control
Bsicamente se tomaron los valores que se presentan sobre el sistema no lineal
implementado en Simulink. La grca 11 muestra la implementacin en Simulink.
Figura 11. Sistema SMIB no lineal implementado en Simulink
Para tal sistema se implement un control PID que permita garantizar estabilidad
aunque el comportamiento no fuera el mejor. Las simulaciones se efectuaron considerando
el siguiente escenario:
Cambio de potencia transmitida desde el generador hacia el bus innito.
Falla en las lneas que conducen la energa.
El ngulo de la mquina es el que permite modicar la cantidad de potencia que
se entrega al sistema. sta accin es necesario en momentos de cambios en el consumo
de energa o al momento de que se presentan fallas en generadores y el generador objeto
de estudio es quien tiene que participar en el control de generacin. La pretencin es
encontrar una seal de potencia mecnica que permita mover el ngulo representado por
19
x
1
y que siga la referencia deseada al pasar de 45,85
hasta 57,29
. para el caso del
control PID se tomaron las siguientes consideraciones:
Cambio de potencia mecnica: T
p
= 7s.
Falla: T
f
= 35s.
Para efectuar la simulacin se consider el cajn Step como la referencia que
pretenda llevar de 45,85
hasta 57,29
el valor del ngulo = x
1
. Puede verse la gura
12. La perturbacin debida a la falla es un cambio en parmetros que fu simulado mediante
el cajn Step3 que ingresa en T
f
= 35s.
Figura 12. Sistema SMIB controlado con PID.
La gura 13 muestra el resultado de la simulacin efectuada usando el control PID.
El eje horizontal tiene valores en segundos y el eje vertical mide la apertura angular en
radianes. Ntese que a los 7 segundos se presenta una variacin de la seal debida a la
variacin de la referencia que busca cambiar el ngulo de separacin de los sistemas. Por
otro lado, en tiempo 35 segundos se percibe el efecto de la falla que cambia los valores de
parmetros. Puede notarse que el control PID no logra llevar la seal a x
1
= 1rad = 57,29
.
Puede notarse en la misma grca que las oscilaciones son prolongadas y que en el caso
del cambio de referencia que se presenta a los 7 segundos, la seal logra alcanzar un estado
estacionario a los 28 segundos de haber iniciado el cambio de referencia; an as, sta seal
no alcanza el valor de referencia pues se estabiliza en 0.89 radianes con e
ss
= 11 %. Al
momento de presentarse la leve falla a los 35 segundos puede notarse que el valor de estado
estacionario cambia, lo que es lgico y tambin se presentan excursiones de la apertura
angular en porcentaje de 9 %. En ste caso se estabiliza cerca de los 20 segundos..
20
Figura 13. Comportamiento de la seal de salida en el sistema SMIB
Se implementa luego el esquema Backstepping en la forma de tracking para hacer
seguimiento a la seal de referencia que se pretende exigir al sistema. La gura muestra la
implementacin efectuada en simulink y que incluye la ley de control para el seguimiento.
En ste caso el cajn Step1 modela la seal de referencia y el cajn Step2 modela la
variazin paramtrica.
En ste caso los tiempos se modicaron dado que las oscilaciones eran menores.
El t
p
= 1s y el t
f
= 3s. La gura 15 muestra de forma comparativa la seal de referencia
(lnea amarilla) y la seal controlada (lnea violeta). Puede notarse la presencia de ciertos
errores en los valores de estado estacionario as como la ausencia de oscilaciones. Ntese
de igual forma que al momento de presentarse la falla (a los 3 segundos), no se presentan
oscilaciones. Puede armarse de alguna forma que ste tipo de control ofrece mejores
caractersticas para efectos del control de la potencia mecnica. Existe un error de estado
estacionario que se gn se analiza puede disminuir con el aumento de los valores de las
constantes k
1
= k
2
. La gura 16 muestra el comportamiento de la seal de salida con
ganacias de valores mayores. Puede notarse la reduccin del error de estado estacionario.
El comportamiento en el momento de la falla tambin reeja que el controlador no lineal
es adecuado para ste sistema SMIB.
21
Figura 14. Figura de la implementacin del backstepping en Simulink
Figura 15. Seal en el tiempo del comportamiento de la salida controlada por Backstepping con k
1
= k
2
= 20
22
Figura 16. Seal de salida con valores k
1
= k
2
= 20
Se incluy el valor de saturacin para la potencia mecnica de manera que pudieran
mejorarse las condiciones de lmite de potencia debida a turbinas. Lo anterior implico una
desmejora sustancial en el comportamiento del ngulo de la mquina. Las guras 17 y 18
Figura 17. Comportamiento del control PID con seal de control saturada.
23
Figura 18. Comportamiento del control Backstepping con seal de control saturada.
V. DISCUSIONES Y CONCLUSIONES
En la implementacin para el control del sistema SMIB fu necesario incluir un
paso adicional para poder obtener la forma estndar del Integrator Backsteppingtext. ste
paso consisti en el cambio de u por u = au (x
1
). As mismo, los requerimientos del
sistema de control exigan la necesidad de seguir un valor de = x
1
pues de sta forma
se dene la potencia que se transmite desde la mquina generadora hacia la barra innita.
Los resultados de la implementacin muestran la gran capacidad del control
implementado. Contrario a lo sucedido con el control PID que presentaba oscilaciones
extremas, el control no lineal oper sobre el sistema y estabiliz as como elimin
oscilaciones indeseadas en el comportamiento del ngulo. Las simulaciones muestran, por
ejemplo, excursiones demasiado grandes del angulo. stas enormes implicaciones, aunque
pueden verse en la simulacin, no son realistas pues una excursin tan grande en el ngulo
en un sistema real lo conduce directamente al colapso o al apagado de la mquina. El
control no lineal implementado es capaz de evitar las oscilaciones y por tanto garantiza la
estabilidad del mismo.
En lo que tiene que ver con la respuesta a falla. El esquema de control pudo
24
responder adecuadamente a la perturbacin producida por la falla lnea a tierra simulada.
sta posibilidad garantiza la robusts del esquema implementado frente a variacin
paramtrica del sistema.
Adicional a lo anterior, cabe mencionar que el valor de los parmetros de las
constantes k
1
y k
2
determinan errores de estado estacionario en el seguimiento de seales.
En la seccin de ejemplos de seguimiento se logra hacer evidente que las seales mantienen
un error que se hace ms pequeo en la medida en que el valor de las constantes se hagan
mas grandes. En cuanto a aregulacin, el valor de estado estacionario es siempre cero para
la seal de salida de los diferentes sistemas. Los valores hallados para k
1
y k
2
permiten el
cumplimiento de las condiciones de Lyapunov en la ley de control que usa la realimentacin
de los valores de estado.-
La metodologa backstepping se implement basado en la literatura. Los documen-
tos mas claros son los de los autores Kokotovic y Fossen, [7], [11], [4].
25
REFERENCIAS
[1] BESANCON, G., GEORGES, D., RAFANOTSIMIVA, L., AND RAZAFIMAHENINA, J. Simple strategy for constrained backstepping
design with application to smib control. In American Control Conference (ACC), 2012 (2012), pp. 15251530.
[2] BYRNES, C., AND ISIDORI, A. New results and examples in nonlinear feedback stabilization. Systems & Control Letters 12, 2
(1989), 437442.
[3] DYSKO, A., LEITHEAD, W., AND OREILLY, J. Enhanced power system stability by coordinated pss design. Power Systems,
IEEE Transactions on 25, 1 (2010), 413422.
[4] FOSSEN, T. I., AND STRAND, J. P. Tutorial on nonlinear backstepping: Applications to ship control. Modeling, Identication and
Control 20, 2 (1999), 83135.
[5] FU, J., AND ZHAO, J. Robust nonlinear excitation control based on a novel adaptive back-stepping design for power systems. In
American Control Conference, 2005. Proceedings of the 2005 (2005), pp. 27152720 vol. 4.
[6] JAIN, S., KHORRAMI, F., AND FARDANESH, B. Adaptive nonlinear excitation control of power systems with unknown
interconnections. Control Systems Technology, IEEE Transactions on 2, 4 (1994), 436446.
[7] KANELLAKOPOULOS, I., KOKOTOVIC, P., AND MORSE, A. A toolkit for nonlinear feedback design. Systems And Control Letters
18, 2 (1992), 83 92.
[8] KARIMI, A., CHOUDHRY, M., AND FELIACHI, A. Coordinated backstepping controls for power system stability enhancement. In
Power Symposium, 2008. NAPS 08. 40th North American (2008), pp. 18.
[9] KARIMI, A., AND FELIACHI, A. Decentralized adaptive backstepping control of electric power systems. Electric Power Systems
Research 78, 3 (2008), 484 493.
[10] KOKOTOVIC, P. The joy of feedback: nonlinear and adaptive. Control Systems, IEEE 12, 3 (1992), 717.
[11] KRSTIC, M., KOKOTOVIC, P. V., AND KANELLAKOPOULOS, I. Nonlinear and Adaptive Control Design, 1st ed. John Wiley &
Sons, Inc., New York, NY, USA, 1995.
[12] KUNDUR, P. Power System Stability and Control. New York, 1994.
[13] KUNDUR, P., PASERBA, J., AJJARAPU, V., ANDERSSON, G., BOSE, A., CANIZARES, C., HATZIARGYRIOU, N., HILL, D.,
STANKOVIC, A., TAYLOR, C., VAN CUTSEM, T., AND VITTAL, V. Denition and classication of power system stability ieee/cigre
joint task force on stability terms and denitions. Power Systems, IEEE Transactions on 19, 3 (2004), 13871401.
[14] ROOSTA, A., GEORGES, D., AND HADJ-SAID, N. Nonlinear control for power systems based on a backstepping method. In
Decision and Control, 2001. Proceedings of the 40th IEEE Conference on (2001), vol. 4, pp. 30373042 vol.4.
[15] ROOSTA, A., GEORGES, D., AND HADJ-SAID, N. Nonlinear control for power systems based on a backstepping method. In
Decision and Control, 2001. Proceedings of the 40th IEEE Conference on (2001), vol. 4, pp. 30373042 vol.4.
[16] SABERI, A., KOKOTOVIC, P., AND SUSSMANN, H. Global stabilization of partially linear composite systems. Proceedings of the
28th IEEE Conference on Decision and Control, 1989 2 (1989).
[17] WANG, Y., HILL, D., MIDDLETON, R., AND GAO, L. Transient stability enhancement and voltage regulation of power systems.
Power Systems, IEEE Transactions on 8, 2 (1993), 620627.
You might also like
- Alba D42LDocument23 pagesAlba D42Ljose100% (1)
- Sistemas de IluminaciónDocument59 pagesSistemas de IluminaciónAlmotriota LatinoamericanistaNo ratings yet
- Reglamento General Doctorado 2012Document43 pagesReglamento General Doctorado 2012Almotriota LatinoamericanistaNo ratings yet
- Bases Matematicas ComplementosDocument31 pagesBases Matematicas ComplementosAlmotriota LatinoamericanistaNo ratings yet
- Controlabilidad y ObservabilidadDocument26 pagesControlabilidad y ObservabilidadAlmotriota LatinoamericanistaNo ratings yet
- Alvaro Cunhal-Un Partido Con Paredes de CristalDocument103 pagesAlvaro Cunhal-Un Partido Con Paredes de CristalCjc-cmc AsturiesNo ratings yet
- Proceso de Paz MitomaniaDocument4 pagesProceso de Paz MitomaniaAlmotriota LatinoamericanistaNo ratings yet
- Van Dijk Análisis Del DiscursoDocument30 pagesVan Dijk Análisis Del DiscursofedorvladislavNo ratings yet
- Documentos de Trabajo No 133Document27 pagesDocumentos de Trabajo No 133Almotriota LatinoamericanistaNo ratings yet
- Lab Control2 P02 2008 IIDocument2 pagesLab Control2 P02 2008 IIAlmotriota LatinoamericanistaNo ratings yet
- Documento Final Energia Electrica ColombiaDocument354 pagesDocumento Final Energia Electrica Colombiajoonie5No ratings yet
- 2 (2007) MemDocument91 pages2 (2007) MemAlmotriota LatinoamericanistaNo ratings yet
- Filtros 3er Armonico PDFDocument6 pagesFiltros 3er Armonico PDFRolando Henry Flores CamavilcaNo ratings yet
- Clase 3.1 Metodo Fasorial Dipolos Series y ParalelosDocument16 pagesClase 3.1 Metodo Fasorial Dipolos Series y Paralelosjaime andres MondragonNo ratings yet
- Circuito MagneticoDocument17 pagesCircuito MagneticoMartin Alejandro Betancur ChuquimiaNo ratings yet
- Ae2420z GS1BDocument2 pagesAe2420z GS1BAndres VargazNo ratings yet
- Prueba Fisica IIDocument2 pagesPrueba Fisica IIRodrigo Campusano ChangNo ratings yet
- Capitulo 7 Vatimetro ElectrodinamicoDocument33 pagesCapitulo 7 Vatimetro ElectrodinamicoJmLg216No ratings yet
- Tesis Presentacion FinalDocument33 pagesTesis Presentacion FinalAalfredo Lezama RamirezNo ratings yet
- Informe de Laboratorio 6 Circuitos Adc 0808Document7 pagesInforme de Laboratorio 6 Circuitos Adc 0808David Ajhuacho IncaNo ratings yet
- Guia Rapido Submonitor PDFDocument2 pagesGuia Rapido Submonitor PDFAbraham JimenezNo ratings yet
- Los Motores Sumergibles Franklin ElectricDocument4 pagesLos Motores Sumergibles Franklin ElectricFelipe ChoqueNo ratings yet
- Informe AplausosDocument5 pagesInforme AplausosKelly GomezxdedNo ratings yet
- Api 3-60 ADocument1 pageApi 3-60 AkirkinhoNo ratings yet
- Informe Lección 7Document4 pagesInforme Lección 7kikeNo ratings yet
- Plan de Trabajo Del EstudianteDocument6 pagesPlan de Trabajo Del Estudiantekevin humbofernandezNo ratings yet
- Laboratorio VII - Balanza Básica de CorrienteDocument6 pagesLaboratorio VII - Balanza Básica de CorrienteBruno AlcocerNo ratings yet
- Informe SSO N2 JUNDocument21 pagesInforme SSO N2 JUNCésar Riquelme VásquezNo ratings yet
- Semana 10-ElectrostticaDocument22 pagesSemana 10-ElectrostticaAlanis MaldonadoNo ratings yet
- Problemas Resueltos Intro Potencia PDFDocument5 pagesProblemas Resueltos Intro Potencia PDFDan Rodriguez100% (2)
- Tarea de LecturaDocument11 pagesTarea de Lecturabrayan estiven vilca ponceNo ratings yet
- Documentos Bomba NorosíDocument5 pagesDocumentos Bomba NorosíKaren Arrautt SalcedoNo ratings yet
- Prueba de ConocimientoDocument2 pagesPrueba de ConocimientoEduardo RomeroNo ratings yet
- Informe 9 FEDocument4 pagesInforme 9 FEJhonatan CambisacaNo ratings yet
- Arco PlasmaticoDocument14 pagesArco PlasmaticoeduardoslmNo ratings yet
- Sistema de Monitoreo de Calidad de La Energía - DocxsimoceDocument2 pagesSistema de Monitoreo de Calidad de La Energía - DocxsimoceC Ramon GarciaNo ratings yet
- Proyecto Fisica (PENDULO SIMPLE)Document19 pagesProyecto Fisica (PENDULO SIMPLE)Alberto TorresNo ratings yet
- Generador ElectricoDocument15 pagesGenerador ElectricoJuan AntonioNo ratings yet
- Resumen RITELDocument71 pagesResumen RITELSantiago VelásquezNo ratings yet
- Fisica 3 ElectricidadDocument2 pagesFisica 3 ElectricidadNILZANo ratings yet
- Leyes de KirchoffDocument4 pagesLeyes de KirchoffmarthaNo ratings yet