You might also like
- Design and Development of 3 Phase PWM inDocument4 pagesDesign and Development of 3 Phase PWM inMarc TcheukabaNo ratings yet
- Design of Multi-Level Inverter and Its Application As Statcom To Compensate Voltage Sags Due To FaultsDocument6 pagesDesign of Multi-Level Inverter and Its Application As Statcom To Compensate Voltage Sags Due To FaultsManpreet SinghNo ratings yet
- Fuzzy Logic Controller Based On Voltage Source Converter-Hvdc SystemDocument7 pagesFuzzy Logic Controller Based On Voltage Source Converter-Hvdc SystemBhuvneshRathoreNo ratings yet
- Different PWM Modulation Techniques Indexes Performance Evaluation, 1993.Document7 pagesDifferent PWM Modulation Techniques Indexes Performance Evaluation, 1993.Ali H. NumanNo ratings yet
- DSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM TechniqueDocument18 pagesDSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM Techniquebalamurugan041992No ratings yet
- SPWM V/HZ InverterDocument51 pagesSPWM V/HZ InverterLabi BajracharyaNo ratings yet
- Harmonic Analysis of Three Phase SPWM and SVPWM ConvertersDocument9 pagesHarmonic Analysis of Three Phase SPWM and SVPWM ConvertersMuhammad ZamanNo ratings yet
- SVPWM Thesis Prepared by DeekshitDocument81 pagesSVPWM Thesis Prepared by Deekshitchunduri_rambabuNo ratings yet
- V/F Speed Control of SVPWM Based Solar Fed Induction MotorDocument7 pagesV/F Speed Control of SVPWM Based Solar Fed Induction MotorInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Selective Harmonic Elimination by Programmable Pulse Width Modulation in InvertersDocument6 pagesSelective Harmonic Elimination by Programmable Pulse Width Modulation in InvertersseventhsensegroupNo ratings yet
- Design and Construction of Single Phase Pure Sine Wave Inverter For Photo Voltaic ApplicationDocument4 pagesDesign and Construction of Single Phase Pure Sine Wave Inverter For Photo Voltaic ApplicationRafid Haider ShantonuNo ratings yet
- Design and Simulation of an Inverter With High Frequency Sinusoidal PWM Switching Technique for Harmonic Reduction in a Standalone Utility Grid Harmonic Reduction in a Standalone Utility Grid Synchronized Photovoltaic SystemDocument6 pagesDesign and Simulation of an Inverter With High Frequency Sinusoidal PWM Switching Technique for Harmonic Reduction in a Standalone Utility Grid Harmonic Reduction in a Standalone Utility Grid Synchronized Photovoltaic SystemS.m. FerdousNo ratings yet
- Investigation of Three-Phase Grid-Connected Inverter For Photovoltaic ApplicationDocument6 pagesInvestigation of Three-Phase Grid-Connected Inverter For Photovoltaic ApplicationAmran MaulanaNo ratings yet
- Design and Simulation of Programmable AC-DC Converter Using Pulse Width Modulation (PWM) Techniques in MATLABDocument5 pagesDesign and Simulation of Programmable AC-DC Converter Using Pulse Width Modulation (PWM) Techniques in MATLABJeannot MpianaNo ratings yet
- Self-Tuning Fuzzy PI Dc-Bus Voltage Controller and Fuzzy Switching Sequences Selection For Direct Power Control of PWM AC/DC ConverterDocument6 pagesSelf-Tuning Fuzzy PI Dc-Bus Voltage Controller and Fuzzy Switching Sequences Selection For Direct Power Control of PWM AC/DC ConverterZikra ElninoNo ratings yet
- A New Control Strategy For Voltage-Type PWM Rectifiers To Realize Zero Steady-State Control Error in Input CurrentDocument7 pagesA New Control Strategy For Voltage-Type PWM Rectifiers To Realize Zero Steady-State Control Error in Input Currentmipanduro7224No ratings yet
- Etco 2017 GRP 8Document3 pagesEtco 2017 GRP 8RohanNo ratings yet
- DSP-Based AC-DC-AC Converter SPWM ControlDocument18 pagesDSP-Based AC-DC-AC Converter SPWM ControlSteve TranNo ratings yet
- Advanced PWM Techniques For Control of Power Electronic Converters in PV and Motor Drive SystemsDocument21 pagesAdvanced PWM Techniques For Control of Power Electronic Converters in PV and Motor Drive SystemsAman MalikNo ratings yet
- Ilyin2016 PDFDocument6 pagesIlyin2016 PDFAnonymous fqHGrbwxeFNo ratings yet
- Comparison of Output Current Harmonics of Voltage Source Inverter Used Different PWM Control TechniquesDocument10 pagesComparison of Output Current Harmonics of Voltage Source Inverter Used Different PWM Control TechniquesFitri AhmadNo ratings yet
- A High-Performance Generalized Discontinuous PWM AlgorithmDocument13 pagesA High-Performance Generalized Discontinuous PWM AlgorithmBrahmananda Reddy TeegalaNo ratings yet
- 6 Michal KNAPCZYK Krzysztof PIENKOWSKI 2 PDFDocument16 pages6 Michal KNAPCZYK Krzysztof PIENKOWSKI 2 PDFDevendra HoleyNo ratings yet
- Study and Simulation of Current Controlled PWM Inverters and Their ApplicationsDocument5 pagesStudy and Simulation of Current Controlled PWM Inverters and Their ApplicationsHassan SouleymanNo ratings yet
- H09344448 PDFDocument5 pagesH09344448 PDFslimabidNo ratings yet
- Analysis Hardware Implementation of Three Phase Voltage Source Inverter IJERTV2IS50796Document10 pagesAnalysis Hardware Implementation of Three Phase Voltage Source Inverter IJERTV2IS50796Paul Mathew 21PHD1086No ratings yet
- Control Strategy For Three Phase PWM Rectifier Using SVM ModulationDocument7 pagesControl Strategy For Three Phase PWM Rectifier Using SVM Modulationeditor_ijtelNo ratings yet
- 23D AdvanceDocument8 pages23D AdvancePATEL SWAPNEELNo ratings yet
- Analysis and Simulation of Single Phase Inverter Controlled by Neural NetworkDocument14 pagesAnalysis and Simulation of Single Phase Inverter Controlled by Neural NetworknandhakumarmeNo ratings yet
- Comparative Study of Different Control Strategies For DstatcomDocument7 pagesComparative Study of Different Control Strategies For DstatcomAmmuRaNo ratings yet
- A Novel SVPWM Overmodulation Technique Based On Voltage Correcting FunctionDocument8 pagesA Novel SVPWM Overmodulation Technique Based On Voltage Correcting Functionsravya saiNo ratings yet
- Implementation of SPWM Technique For 3 - VSI Using STM32F4 Discovery Board Interfaced With MATLABDocument5 pagesImplementation of SPWM Technique For 3 - VSI Using STM32F4 Discovery Board Interfaced With MATLABkiratNo ratings yet
- 2 Ijeeerfeb20182Document10 pages2 Ijeeerfeb20182TJPRC PublicationsNo ratings yet
- Isie 2000 930468Document9 pagesIsie 2000 930468AK KhanNo ratings yet
- Direct Power Control of PWM Converter Without Power Source VoltaDocument6 pagesDirect Power Control of PWM Converter Without Power Source Voltabalaji mendiNo ratings yet
- A High-Performance Generalized Discontinuous PWM Algorithm: Ahmet M. Hava,, Russel J. Kerkman,, and Thomas A. LipoDocument13 pagesA High-Performance Generalized Discontinuous PWM Algorithm: Ahmet M. Hava,, Russel J. Kerkman,, and Thomas A. LipoSherif M. DabourNo ratings yet
- Mathematical Analysis of SVPWM For Inverter Fed DTC of Induction Motor DriveDocument6 pagesMathematical Analysis of SVPWM For Inverter Fed DTC of Induction Motor DriveNicola Claudiu-IonelNo ratings yet
- Comparative Analysis of Harmonic Reduction of VSI Fed Induction Motor Using SVPWM and Sinusoidal PWMDocument5 pagesComparative Analysis of Harmonic Reduction of VSI Fed Induction Motor Using SVPWM and Sinusoidal PWMSaumitriNo ratings yet
- Unipolar and Bipolar SPWM Voltage Modulation Type Inverter For Improved SwitchingDocument5 pagesUnipolar and Bipolar SPWM Voltage Modulation Type Inverter For Improved SwitchingOdnamra AlvarezNo ratings yet
- 3.1) Artigo - NSPWM e Sobretensões - HavaDocument12 pages3.1) Artigo - NSPWM e Sobretensões - HavaAndréNo ratings yet
- Performance Evaluation of A Newly Constructed Three Phase Flexible Inverter For Speed Control of A Brushless DC MotorDocument11 pagesPerformance Evaluation of A Newly Constructed Three Phase Flexible Inverter For Speed Control of A Brushless DC MotorAJER JOURNALNo ratings yet
- Design of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterDocument4 pagesDesign of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterLawson SangoNo ratings yet
- Sliding Mode Control of SMPS: Ms. A. Jonisha, Mrs. V. Devi MaheswaranDocument11 pagesSliding Mode Control of SMPS: Ms. A. Jonisha, Mrs. V. Devi MaheswaranInternational Organization of Scientific Research (IOSR)No ratings yet
- VVC ControlDocument14 pagesVVC ControlRyte EchanoNo ratings yet
- Discontinuous PWM Techniques For Open-End Winding Induction Motor Drive For Zero Sequence Voltage EliminationDocument13 pagesDiscontinuous PWM Techniques For Open-End Winding Induction Motor Drive For Zero Sequence Voltage EliminationarunkmepesNo ratings yet
- Improving The Power Quality by MLCI Type DSTATCOM: P. Manoj Kumar Y. Sumanth S. N. V. GaneshDocument5 pagesImproving The Power Quality by MLCI Type DSTATCOM: P. Manoj Kumar Y. Sumanth S. N. V. GaneshsarathNo ratings yet
- The International Journal of Engineering and Science (The IJES)Document5 pagesThe International Journal of Engineering and Science (The IJES)theijesNo ratings yet
- Research Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper DrivesDocument4 pagesResearch Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper Drivesdivyamanikandan007No ratings yet
- Comparison of SPWM, THIPWM and PDPWM Techniques for Voltage Source InvertersDocument16 pagesComparison of SPWM, THIPWM and PDPWM Techniques for Voltage Source InvertersRendy MuhammadNo ratings yet
- Full Control of A PWM DCAC Converter For AC Voltage RegulationDocument9 pagesFull Control of A PWM DCAC Converter For AC Voltage RegulationAndrés Felipe CelisNo ratings yet
- 39 A SensorlessDocument8 pages39 A SensorlessANUSHA NAIDUNo ratings yet
- SRCEM Three level H-bridge inverter reportDocument7 pagesSRCEM Three level H-bridge inverter reportAnil ShahNo ratings yet
- Design of SPWM Based Three Phase Inverter Model: Tanuhsree Bhattacharjee Dr. Majid Jamil Dr. Anup JanaDocument6 pagesDesign of SPWM Based Three Phase Inverter Model: Tanuhsree Bhattacharjee Dr. Majid Jamil Dr. Anup JanaandersonNo ratings yet
- Analysis, Simulation and Comparison of Conventional and SVPWM On STATCOM Operation With Linear LoadsDocument4 pagesAnalysis, Simulation and Comparison of Conventional and SVPWM On STATCOM Operation With Linear LoadsSani1248No ratings yet
- Uninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsDocument9 pagesUninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsPhạm Văn TưởngNo ratings yet
- Simulation of Flyback Converter With Peak Current Mode ControlDocument6 pagesSimulation of Flyback Converter With Peak Current Mode ControlAbhijit SinghNo ratings yet
- Minimization of Total Harmonic Distortion Using Pulse Width TechniqueDocument12 pagesMinimization of Total Harmonic Distortion Using Pulse Width TechniqueIOSRjournalNo ratings yet
- Analysis of Single-Phase SPWM Inverter: Sandeep PhogatDocument6 pagesAnalysis of Single-Phase SPWM Inverter: Sandeep PhogatPraneeth MutnuruNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- 2013 Passed OutDocument10 pages2013 Passed Outvvps777No ratings yet
- CV: Electrical Engineer with 17 years experienceDocument1 pageCV: Electrical Engineer with 17 years experiencevvps777No ratings yet
- Design and Simulation of A Novel Self Supported Dynamic Voltage Restorer DVRDocument6 pagesDesign and Simulation of A Novel Self Supported Dynamic Voltage Restorer DVRvvps777No ratings yet
- AbstractDocument1 pageAbstractvvps777No ratings yet
- DVR ModelDocument5 pagesDVR Modelvvps777No ratings yet
- SRF Theory For Different LoadDocument12 pagesSRF Theory For Different Loadvvps777No ratings yet
- Dstatcom and DVRDocument8 pagesDstatcom and DVRvvps777No ratings yet
- DVR Model in PsimDocument7 pagesDVR Model in Psimvvps777No ratings yet
- SRF With DVR (Capacitor Volatge Support)Document10 pagesSRF With DVR (Capacitor Volatge Support)vvps777No ratings yet
- Upqc With GridDocument10 pagesUpqc With Gridvvps777No ratings yet
- By Dynamic Voltage Restorerfor Power Quality ImprovementDocument6 pagesBy Dynamic Voltage Restorerfor Power Quality ImprovementSemal TankNo ratings yet
- SRF Theory in DVRDocument12 pagesSRF Theory in DVRvvps777No ratings yet
- M tech-PEDDocument27 pagesM tech-PEDvvps777No ratings yet
- Zeroth ReviewDocument18 pagesZeroth Reviewvvps777No ratings yet
- Ir 2110Document17 pagesIr 2110Nguyen KhangNo ratings yet
- 11.simulation of Unified Power Quality Conditioner For Power Quality Improvement Using Fuzzy Logic and Neural Network-LibreDocument12 pages11.simulation of Unified Power Quality Conditioner For Power Quality Improvement Using Fuzzy Logic and Neural Network-Librevvps777No ratings yet
- 6n137, Opto CouplerDocument9 pages6n137, Opto Couplervvps777No ratings yet
- Power Quality Notes 1-2 (AK) : Freshupdates - inDocument21 pagesPower Quality Notes 1-2 (AK) : Freshupdates - invvps777No ratings yet
- dsPIC30F4011 DatasheetDocument226 pagesdsPIC30F4011 DatasheetbienlangnxtNo ratings yet
- CT60AMDocument5 pagesCT60AMvvps777No ratings yet
- Abc-Dq and Dq-AbcDocument10 pagesAbc-Dq and Dq-Abcvvps777No ratings yet
- Power Tech Project SolutionsDocument8 pagesPower Tech Project Solutionsvvps777No ratings yet
- 11.simulation of Unified Power Quality Conditioner For Power Quality Improvement Using Fuzzy Logic and Neural Network-LibreDocument12 pages11.simulation of Unified Power Quality Conditioner For Power Quality Improvement Using Fuzzy Logic and Neural Network-Librevvps777No ratings yet
- Types of Wind TurbinesDocument5 pagesTypes of Wind Turbinesvvps777No ratings yet
- Voltage-Source PWM InverterDocument125 pagesVoltage-Source PWM Inverterabdurrahim_t100% (2)
- Constant Frequency UPQCDocument8 pagesConstant Frequency UPQCvvps777No ratings yet
- Milosevic HysteresisDocument15 pagesMilosevic HysteresisJeyanthi GanesanNo ratings yet
- Abstract IeeeDocument13 pagesAbstract Ieeevvps777No ratings yet
- Comprehensive Review of Optimization Techniques Applied For Placement and Sizinf of CupdDocument5 pagesComprehensive Review of Optimization Techniques Applied For Placement and Sizinf of Cupdvvps777No ratings yet
- PDF/ajassp 2008 909 916 PDFDocument8 pagesPDF/ajassp 2008 909 916 PDFHemanth Kumar RajendakumarNo ratings yet
- Preface 2016 Innovative Bridge Design HandbookDocument2 pagesPreface 2016 Innovative Bridge Design HandbookGroupe MilleniumNo ratings yet
- Gmail - Booking Confirmation On IRCTC, Train - 02562, 07-Jan-2021, 2A, NDLS - JYGDocument2 pagesGmail - Booking Confirmation On IRCTC, Train - 02562, 07-Jan-2021, 2A, NDLS - JYGRavi shresthaNo ratings yet
- How To Convert A Project From IAR To CCS - Texas Instruments WikiDocument11 pagesHow To Convert A Project From IAR To CCS - Texas Instruments Wikiteomondo100% (1)
- KD-208 User ManualDocument17 pagesKD-208 User ManualmazacotesNo ratings yet
- Conventional Software Testing Using White Box Method: KINETIK, Vol. 3, No. 1, February 2018, Pp. 65-72Document8 pagesConventional Software Testing Using White Box Method: KINETIK, Vol. 3, No. 1, February 2018, Pp. 65-72Achmad YuszrilNo ratings yet
- Oracle 1z0-497 exam guide with 91% successDocument65 pagesOracle 1z0-497 exam guide with 91% successprem kumarNo ratings yet
- ICT 34 Data Structures and Analysis of AlgorithmDocument9 pagesICT 34 Data Structures and Analysis of AlgorithmKimondo KingNo ratings yet
- Vehicle Renting SystemDocument24 pagesVehicle Renting SystemSubham Kumar IET StudentNo ratings yet
- Denver Ac-5000w Mk2 - EnglishDocument2 pagesDenver Ac-5000w Mk2 - EnglishPrva CetaNo ratings yet
- V Series: User'S Manual SetupDocument109 pagesV Series: User'S Manual SetupTFNo ratings yet
- AI Sentiment Analysis of YouTube CommentsDocument18 pagesAI Sentiment Analysis of YouTube CommentsRey NeshNo ratings yet
- CareerPath SupplyChainDocument27 pagesCareerPath SupplyChainShobhit PareekNo ratings yet
- DRF450 Workshop Manual VDRF03 - 02GB PDFDocument128 pagesDRF450 Workshop Manual VDRF03 - 02GB PDFANH LÊ100% (1)
- PassGuide HP2-H08 V3Document31 pagesPassGuide HP2-H08 V3Kripesh Ramji0% (1)
- 08 - Installation and Maintenance of Health IT Systems - Unit 9 - Creating Fault-Tolerant Systems, Backups, and Decommissioning - Lecture CDocument15 pages08 - Installation and Maintenance of Health IT Systems - Unit 9 - Creating Fault-Tolerant Systems, Backups, and Decommissioning - Lecture CHealth IT Workforce Curriculum - 2012No ratings yet
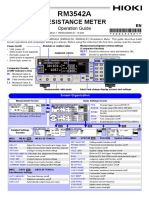
- Resistance Meter: Operation GuideDocument2 pagesResistance Meter: Operation GuideEko SutjiptoNo ratings yet
- EndNote Menus Reference Guide 06-25-18Document16 pagesEndNote Menus Reference Guide 06-25-18ASSOURA BEH BRIST PASSINo ratings yet
- Looking at The Future of Manufacturing Metrology R PDFDocument7 pagesLooking at The Future of Manufacturing Metrology R PDFAdven BrilianNo ratings yet
- Testing Suite PartA - PyDocument14 pagesTesting Suite PartA - PyHugsNo ratings yet
- Resume Test AutomationDocument4 pagesResume Test AutomationAbhinav DesaiNo ratings yet
- Eurelectric Decentralized Storage Finalcover Dcopy 2012 030 0574 01 eDocument49 pagesEurelectric Decentralized Storage Finalcover Dcopy 2012 030 0574 01 eMichele DalenaNo ratings yet
- 205a Vending Machine Quotation PDFDocument1 page205a Vending Machine Quotation PDFPipe JimenezNo ratings yet
- JM JTManualDocument23 pagesJM JTManualcuongNo ratings yet
- 【b】30240301001620 使用说明书 储能三相 sun (5 25) k sg01hp3 eu am2 德业英文Document54 pages【b】30240301001620 使用说明书 储能三相 sun (5 25) k sg01hp3 eu am2 德业英文nguyenvancuong12051999No ratings yet
- ForgusonDocument61 pagesForgusonMadhusudana p nNo ratings yet
- Thermo Scientific Ramsey Oretronic III: Tramp Metal DetectorDocument2 pagesThermo Scientific Ramsey Oretronic III: Tramp Metal Detectorm2dajNo ratings yet
- Unit 2 - Practice 1Document11 pagesUnit 2 - Practice 1Mauricio MartinezNo ratings yet
- Vspace Pro 11 For Windows: (Version 11.1.1)Document20 pagesVspace Pro 11 For Windows: (Version 11.1.1)Bryan LimaNo ratings yet
- B, 40,41, Case 2 Goodyear, Jea, Osumc and MonsantoDocument10 pagesB, 40,41, Case 2 Goodyear, Jea, Osumc and MonsantoSuhel PathanNo ratings yet
- Case StudyDocument10 pagesCase StudyAL-Zheinie TupazNo ratings yet