You might also like
- Mathematical Models and Algorithms for Power System Optimization: Modeling Technology for Practical Engineering ProblemsFrom EverandMathematical Models and Algorithms for Power System Optimization: Modeling Technology for Practical Engineering ProblemsNo ratings yet
- Manual Fcxs500 Eng Rev.0aspa y FlechaDocument62 pagesManual Fcxs500 Eng Rev.0aspa y FlechaMartin Fonseca50% (2)
- Parameter Estimation For Electric Motor Condition MonitoringDocument12 pagesParameter Estimation For Electric Motor Condition MonitoringNatarajNo ratings yet
- IEEE XploreDocument4 pagesIEEE XploreAbhishek SinghNo ratings yet
- AC MachineesreportDocument20 pagesAC Machineesreportaman barnwalNo ratings yet
- Simulation-Based Approach To Application Fitness For An E-BikeDocument6 pagesSimulation-Based Approach To Application Fitness For An E-BikeBatuhan SincanNo ratings yet
- System Identification Algorithm For Systems With Interval CoefficientsDocument8 pagesSystem Identification Algorithm For Systems With Interval Coefficientseetn1100% (1)
- The Squirrel-Cage Induction Motor Model and Its Parameter Identification Via Steady and Dynamic TestsDocument27 pagesThe Squirrel-Cage Induction Motor Model and Its Parameter Identification Via Steady and Dynamic TestsAhmed 7mamNo ratings yet
- Effective Identification of Induction Motor Parameters Based On Fewer MeasurementsDocument6 pagesEffective Identification of Induction Motor Parameters Based On Fewer MeasurementsHichem AbNo ratings yet
- Comparison of The Speedy Estimate Methods of The Induction MotorsDocument12 pagesComparison of The Speedy Estimate Methods of The Induction MotorsTELKOMNIKANo ratings yet
- Mathematics 08 01269Document37 pagesMathematics 08 01269sanatikalaNo ratings yet
- Model-Based Avionic Prognostic Reasoner (MAPR) PDFDocument9 pagesModel-Based Avionic Prognostic Reasoner (MAPR) PDFlalith.shankar7971No ratings yet
- Identification of Model Parameters of Steam Turbine and GovernorDocument15 pagesIdentification of Model Parameters of Steam Turbine and Governorkamranmalik80No ratings yet
- Application of Genetic Algorithms For Determining The Parameters of Induction MotorsDocument5 pagesApplication of Genetic Algorithms For Determining The Parameters of Induction Motorshardik desaiNo ratings yet
- Emcw 2001 Artesis PaperDocument5 pagesEmcw 2001 Artesis Paperವಿಶ್ವನಾಥ ಸಿNo ratings yet
- Identification of Variable Frequency Induction Motor Models From Operating DataDocument8 pagesIdentification of Variable Frequency Induction Motor Models From Operating Datani60No ratings yet
- On - Line Stator Winding Inter - Turn Short - CircuitDocument17 pagesOn - Line Stator Winding Inter - Turn Short - Circuitsaidoune abdelmalekNo ratings yet
- NewNov2016 ModelingandParameterIdentificationofDCMotor PDFDocument12 pagesNewNov2016 ModelingandParameterIdentificationofDCMotor PDFゞ『HaiDerツ98〆No ratings yet
- Uncertainty Analysis of Power System Components Based On Stochastic Response SurfacesDocument8 pagesUncertainty Analysis of Power System Components Based On Stochastic Response SurfacesHassan Ali Al SsadiNo ratings yet
- ISKE2007 Ye ShengyongDocument5 pagesISKE2007 Ye Shengyongrasim_m1146No ratings yet
- Fault Detection of PM Synchronous Motor Via Modulating FunctionsDocument6 pagesFault Detection of PM Synchronous Motor Via Modulating Functionsjithesh87No ratings yet
- Model Reference Adaptive Control Based Parameters Estimation of Permanent Magnet Synchronous Motor DriveDocument9 pagesModel Reference Adaptive Control Based Parameters Estimation of Permanent Magnet Synchronous Motor DriveInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- DC Motor Parameter EstimationDocument10 pagesDC Motor Parameter EstimationElmer HCNo ratings yet
- The Intelligent Fault Diagnosis Frameworks Based On Fuzzy IntegralDocument6 pagesThe Intelligent Fault Diagnosis Frameworks Based On Fuzzy IntegralelmerkhNo ratings yet
- Realtime Parameter Estimation, Calibration and Simulation of A DC MotorDocument10 pagesRealtime Parameter Estimation, Calibration and Simulation of A DC MotorBrasoveanu GheorghitaNo ratings yet
- Identifying Dynamic Model Parameters of A Servo DriveDocument8 pagesIdentifying Dynamic Model Parameters of A Servo DriveBrasoveanu GheorghitaNo ratings yet
- 2009 Parameter Estimationofa DCMotorDocument6 pages2009 Parameter Estimationofa DCMotormohamedNo ratings yet
- Applying Kalman Filtering in Solving SSM Estimation Problem by The Means of EM Algorithm With Considering A Practical ExampleDocument8 pagesApplying Kalman Filtering in Solving SSM Estimation Problem by The Means of EM Algorithm With Considering A Practical ExampleJournal of ComputingNo ratings yet
- Adaptive Theory-Based Improved Linear Sinusoidal Tracer Control Algorithm For DSTATCOMDocument11 pagesAdaptive Theory-Based Improved Linear Sinusoidal Tracer Control Algorithm For DSTATCOMAmmuRaNo ratings yet
- The Use of Genetic Algorithms in Finite Element Model IdentificationDocument8 pagesThe Use of Genetic Algorithms in Finite Element Model IdentificationMilena PopovicNo ratings yet
- Genetic Algorithm Optimized PI and Fuzzy Sliding Mode Speed Control For DTC DrivesDocument6 pagesGenetic Algorithm Optimized PI and Fuzzy Sliding Mode Speed Control For DTC DrivesFrancisco Liszt Nunes JuniorNo ratings yet
- Permanent Magnet Synchronous Motor Parameter Identification Using Particle Swarm OptimizationDocument8 pagesPermanent Magnet Synchronous Motor Parameter Identification Using Particle Swarm OptimizationSrinivas KamarsuNo ratings yet
- Fuzzy Idle Speed ControlDocument6 pagesFuzzy Idle Speed ControlIkhwanul KhairiNo ratings yet
- Fuzzy Flux EstimatorDocument9 pagesFuzzy Flux EstimatorMuhammad Ali Masood CheemaNo ratings yet
- Energies: Research On Improved Auto-Tuning of A PID Controller Based On Phase Angle MarginDocument16 pagesEnergies: Research On Improved Auto-Tuning of A PID Controller Based On Phase Angle MarginLautaro Benjamín IbañezNo ratings yet
- Sine Calafiore 4Document14 pagesSine Calafiore 4Sathish KrishnaNo ratings yet
- 1 s2.0 S0888327014001332 Main PDFDocument15 pages1 s2.0 S0888327014001332 Main PDFbasic joNo ratings yet
- Vector Control System of Induction Motor Based On Fuzzy Control MethodDocument5 pagesVector Control System of Induction Motor Based On Fuzzy Control MethodjhonnydesaNo ratings yet
- 56 DorDocument14 pages56 DorAmy GrayNo ratings yet
- Articulo 1Document8 pagesArticulo 1Jhon Fredy cortesNo ratings yet
- Effective Estimation of Speed and Rotor Position of A PM Synchronous Motor Drive by A Kalman FiltDocument7 pagesEffective Estimation of Speed and Rotor Position of A PM Synchronous Motor Drive by A Kalman FiltAli H. NumanNo ratings yet
- Applsci 08 01073 PDFDocument13 pagesApplsci 08 01073 PDFErsi Ago100% (1)
- Analog Circuit Fault Detection by Impulse Response-Based Signature AnalysisDocument16 pagesAnalog Circuit Fault Detection by Impulse Response-Based Signature Analysisকস্তুরী ঘোষNo ratings yet
- NARMAX Model Identification of A Palm Oil Biodiesel Engine Using Multi-Objective Optimization Differential EvolutionDocument10 pagesNARMAX Model Identification of A Palm Oil Biodiesel Engine Using Multi-Objective Optimization Differential EvolutionYlm PtanaNo ratings yet
- Paper 15-A Review On Parameters Identification Methods For Asynchronous MotorDocument6 pagesPaper 15-A Review On Parameters Identification Methods For Asynchronous MotorAldemar GonzalezNo ratings yet
- System Identification Using Intelligent AlgorithmsDocument13 pagesSystem Identification Using Intelligent AlgorithmsAnonymous gJHAwzENo ratings yet
- Energies 11 01288Document20 pagesEnergies 11 01288Sudarsan Kumar VenkatesanNo ratings yet
- Landau RSTDocument11 pagesLandau RSTpbaculimaNo ratings yet
- Journal - Jpe - 16-3 - 854351307 2Document13 pagesJournal - Jpe - 16-3 - 854351307 2Behrouz MinayiNo ratings yet
- Ijest11 03 07 142Document5 pagesIjest11 03 07 142hoangductuanNo ratings yet
- PerformanceDocument6 pagesPerformanceMoisés Martínez (lesndhem)No ratings yet
- Parameters Identification of Induction Motor Model BasedDocument10 pagesParameters Identification of Induction Motor Model Basedretrueke1170No ratings yet
- Pillay Application GeneticDocument10 pagesPillay Application GenetickfaliNo ratings yet
- Application - of - Structural - Analysis - To - Improve - Fault - Diagnosis - in - A - Gas - TurbineDocument18 pagesApplication - of - Structural - Analysis - To - Improve - Fault - Diagnosis - in - A - Gas - TurbineRafael Garcia IllescasNo ratings yet
- Optimal Signal Selection For Power System Ambient Mode Estimation Using A Prediction Error CriterionDocument13 pagesOptimal Signal Selection For Power System Ambient Mode Estimation Using A Prediction Error Criterionperic_vedranNo ratings yet
- BLDC - GA - SA - ICIAS 2007 - NovDocument5 pagesBLDC - GA - SA - ICIAS 2007 - NovmanasrinuNo ratings yet
- The Econometric Society, Wiley Econometrica: This Content Downloaded From 193.227.1.29 On Sat, 23 Jul 2016 23:17:22 UTCDocument22 pagesThe Econometric Society, Wiley Econometrica: This Content Downloaded From 193.227.1.29 On Sat, 23 Jul 2016 23:17:22 UTCahmed22gouda22No ratings yet
- Paper: New Algorithm ofDocument7 pagesPaper: New Algorithm ofAlexander BuenoNo ratings yet
- Identification of The Machine Parameters IN Vector Controlled Induction Motor DriveDocument6 pagesIdentification of The Machine Parameters IN Vector Controlled Induction Motor DriveBelkacem BerrehailNo ratings yet
- Avr Ieee Dc1Document6 pagesAvr Ieee Dc1Diego J. AlverniaNo ratings yet
- Piezas de Recambio para Los Sistemas de Inyección de Combustible CATERPILLAR, CUMMINS, CAVDocument78 pagesPiezas de Recambio para Los Sistemas de Inyección de Combustible CATERPILLAR, CUMMINS, CAVMiguel Ángel Gil PérezNo ratings yet
- BEEE - Batch 6Document22 pagesBEEE - Batch 6Neo TarunNo ratings yet
- Eee DSP 2 MarksDocument24 pagesEee DSP 2 Marksselvakumargeorg1722No ratings yet
- Networking Deep Dive PDFDocument6 pagesNetworking Deep Dive PDFmbalascaNo ratings yet
- Testbench BookDocument114 pagesTestbench BookPure DecSecNo ratings yet
- Speed Up Demanding Workloads, Save Admin Hassle, and Maximize Storage Capacity With A Dell EMC Isilon All-Flash Storage SystemDocument20 pagesSpeed Up Demanding Workloads, Save Admin Hassle, and Maximize Storage Capacity With A Dell EMC Isilon All-Flash Storage SystemPrincipled TechnologiesNo ratings yet
- Pyro MeterDocument6 pagesPyro Meterseeralan balakrishnanNo ratings yet
- Exercise 11Document36 pagesExercise 11David BamNo ratings yet
- GE Fanuc AutomationDocument847 pagesGE Fanuc AutomationNgọc Phê HồNo ratings yet
- UVLayout Installation GuideDocument11 pagesUVLayout Installation GuideJose de la FuenteNo ratings yet
- Service Manual Audio Car Philips CEM250-55Document32 pagesService Manual Audio Car Philips CEM250-55Alexandre Pereira NunesNo ratings yet
- Flood and Earthquake Detection and Rescue Using IoT TechnologyDocument5 pagesFlood and Earthquake Detection and Rescue Using IoT Technologynama belakang nama depanNo ratings yet
- WL 299CDocument19 pagesWL 299CSorin GhitaNo ratings yet
- Error Solution Canon Tpye 4570Document61 pagesError Solution Canon Tpye 4570Soki LeonardiNo ratings yet
- List of IEC Standards - WikipediaDocument26 pagesList of IEC Standards - WikipediaEngr saqibNo ratings yet
- Instruction Code Instruction Code Instruction Code Instruction Code Instruction CodeDocument4 pagesInstruction Code Instruction Code Instruction Code Instruction Code Instruction Codesm_nictNo ratings yet
- Electric Car Battery Management System (BMS) TrainerDocument3 pagesElectric Car Battery Management System (BMS) Trainermanual imbNo ratings yet
- Homework v.1Document5 pagesHomework v.1RasedulIslam50% (2)
- SMB/4144/R: Strategic Business Plan (SBP)Document5 pagesSMB/4144/R: Strategic Business Plan (SBP)ytumayNo ratings yet
- Mrfud Description: Huawei Technologies Co., LTDDocument14 pagesMrfud Description: Huawei Technologies Co., LTDعلي عباسNo ratings yet
- Edgefx Technologies, A Practical Guide To Build Electronic Projects!.telangana, India, Edgefx, S/a.Document94 pagesEdgefx Technologies, A Practical Guide To Build Electronic Projects!.telangana, India, Edgefx, S/a.JoséArdichotti100% (2)
- Employee Attendance Management SystemDocument15 pagesEmployee Attendance Management SystemJitender KumarNo ratings yet
- Torque Multiplier Catalog MC 14 - 0Document16 pagesTorque Multiplier Catalog MC 14 - 0Jeremy StadtlerNo ratings yet
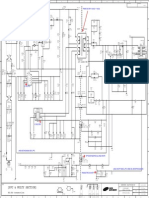
- (PFC & Multy Section) : Tranf - de Stby 5.3Vcd Y 13VcdDocument2 pages(PFC & Multy Section) : Tranf - de Stby 5.3Vcd Y 13Vcdcentauro2013100% (1)
- Concrete Electrical ResistivityDocument7 pagesConcrete Electrical ResistivityFernando MoitaNo ratings yet
- Ec 501: Advanced Microprocessor and MicrocontrollerDocument2 pagesEc 501: Advanced Microprocessor and Microcontrollersunil kumarNo ratings yet
- Merus A2 Module User Manual 3.1 PDFDocument110 pagesMerus A2 Module User Manual 3.1 PDFFawad NoorNo ratings yet
- Hybrid Nanophotonics: Review of Actual ProblemsDocument68 pagesHybrid Nanophotonics: Review of Actual ProblemsTarun SinghalNo ratings yet
- Feedback Vs FeedforwardDocument27 pagesFeedback Vs FeedforwardjjhenNo ratings yet