You might also like
- Types of AlternatorsDocument12 pagesTypes of AlternatorsHamoudRazaMazherNo ratings yet
- Modeling and Simulation of BLDC Motor in MATLABDocument5 pagesModeling and Simulation of BLDC Motor in MATLABvishiwizardNo ratings yet
- Brushless DC (BLDC) Motor FundamentalsDocument20 pagesBrushless DC (BLDC) Motor FundamentalsEdo007100% (1)
- Principles of Switched Reluctance Motor OperationDocument52 pagesPrinciples of Switched Reluctance Motor OperationChandru PrasathNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Speed Control For Brushless DC MotorsDocument50 pagesSpeed Control For Brushless DC MotorsMiladShahabiNo ratings yet
- Dynamic Modelling of Induction MotorDocument12 pagesDynamic Modelling of Induction Motorvidya_sagar826No ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Modeling and Simulation of BLDC Motor Using Soft Computing TechniquesDocument5 pagesModeling and Simulation of BLDC Motor Using Soft Computing TechniquesJulián Peláez RestrepoNo ratings yet
- Brushless DC Motor: Position Linear Control SimulationDocument6 pagesBrushless DC Motor: Position Linear Control SimulationsebastianG1995No ratings yet
- Brushless DC Motors: An Introduction to Their Construction, Working Principles and AdvantagesDocument21 pagesBrushless DC Motors: An Introduction to Their Construction, Working Principles and AdvantagesSRL MECHNo ratings yet
- Brushless DC MotorsDocument6 pagesBrushless DC Motorssheela lNo ratings yet
- Implementing Embedded Speed Control For Brushless DC Motors Part1Document8 pagesImplementing Embedded Speed Control For Brushless DC Motors Part1charliesteven100% (2)
- Embedded BLCDDocument24 pagesEmbedded BLCDDhananjay PatilNo ratings yet
- FIGURE 3.1 Switched Reluctance Motor Configurations. (A) One Tooth Per Pole. (B) Two Teeth Per Pole (12/10 Poles)Document32 pagesFIGURE 3.1 Switched Reluctance Motor Configurations. (A) One Tooth Per Pole. (B) Two Teeth Per Pole (12/10 Poles)starboyNo ratings yet
- Motor Drives BY K .Sunil Kumar Griet-Power ElectronicsDocument4 pagesMotor Drives BY K .Sunil Kumar Griet-Power ElectronicsKalyan KumarNo ratings yet
- Essential Guide to Brushless Drive Motion Control SystemsDocument26 pagesEssential Guide to Brushless Drive Motion Control SystemsAnonymous bjXxKrQa6bNo ratings yet
- Unit Iii Switched Reluctance MotorDocument18 pagesUnit Iii Switched Reluctance MotorMürlî MünnâNo ratings yet
- 02-1 Synchronous MachinesDocument48 pages02-1 Synchronous MachinesvenikiranNo ratings yet
- 305-149767815014-19Document6 pages305-149767815014-19adane gashuNo ratings yet
- Note 8 Electric Actuators: Lecture Notes of ME 475: Introduction To MechatronicsDocument13 pagesNote 8 Electric Actuators: Lecture Notes of ME 475: Introduction To MechatronicsSapath Narsingh BogatiNo ratings yet
- BLDC Motor Application Techniques 1701585005Document50 pagesBLDC Motor Application Techniques 1701585005qn27kkbf4hNo ratings yet
- BLDC Under Load PDFDocument9 pagesBLDC Under Load PDFAhmed ShoeebNo ratings yet
- Module 2 - Switched Reluctance MotorDocument20 pagesModule 2 - Switched Reluctance MotorkesavantNo ratings yet
- Mathematical Modelling and Position Control of Brushless DC (BLDC) MotorDocument8 pagesMathematical Modelling and Position Control of Brushless DC (BLDC) MotorVictor FurmanNo ratings yet
- Homwork May DienDocument2 pagesHomwork May DienBk DecNo ratings yet
- MSE310-2016 Lecture Notes 3.0-3.1.5 (Student) PDFDocument63 pagesMSE310-2016 Lecture Notes 3.0-3.1.5 (Student) PDFRanaNo ratings yet
- Field Oriented Control For Space Vector Modulation Based Brushless DC Motor DriveDocument8 pagesField Oriented Control For Space Vector Modulation Based Brushless DC Motor DriveSushant MandalNo ratings yet
- Stepper Motor Operation & C Language Program CodeDocument16 pagesStepper Motor Operation & C Language Program CodeHendrie TanNo ratings yet
- EPO640 Electrical Drives: BLDC and Stepper MotorsDocument36 pagesEPO640 Electrical Drives: BLDC and Stepper MotorsZariz ZakianNo ratings yet
- DC MachineDocument33 pagesDC MachineJevon WilsonNo ratings yet
- DocumentDocument7 pagesDocumentakhilnandanNo ratings yet
- BLDC MATLAB SimulationDocument5 pagesBLDC MATLAB Simulationdhaval2430No ratings yet
- Unit3 (Ac Drives)Document20 pagesUnit3 (Ac Drives)vedala chaitanyaNo ratings yet
- ALTERNATOR TITLEDocument23 pagesALTERNATOR TITLEpremameNo ratings yet
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDocument5 pagesSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNo ratings yet
- DC MotorDocument1 pageDC MotorSathish KumarNo ratings yet
- Using DC Motors in Fighting RobotsDocument23 pagesUsing DC Motors in Fighting Robotsshraddha_thakkar_2No ratings yet
- Three-Phase Alternating Current Motors - Free Online Tutorial Part 1Document20 pagesThree-Phase Alternating Current Motors - Free Online Tutorial Part 1Sravanthi MedipalliNo ratings yet
- A Novel Internal Fault Analysis of A Brushless DC Motor Using Winding Function TheoryDocument6 pagesA Novel Internal Fault Analysis of A Brushless DC Motor Using Winding Function TheorymssmsNo ratings yet
- REPS 12 PaperDocument7 pagesREPS 12 PaperbharathesecNo ratings yet
- Construction of SRMDocument5 pagesConstruction of SRMdhanusiya balamuruganNo ratings yet
- EE402 SEM Module 1 PMDC&BLDCDocument41 pagesEE402 SEM Module 1 PMDC&BLDCJohn JNo ratings yet
- Unit-V DC MotorDocument57 pagesUnit-V DC MotorSri balaji sampathNo ratings yet
- Lecture 04 - Chap 3 Modeling of Generators and TransformersDocument20 pagesLecture 04 - Chap 3 Modeling of Generators and TransformersHabes NoraNo ratings yet
- Modeling, Simulation, and Analysis of Permanent-Magnet Motor Drives, The Brushless DC Motor DriveDocument6 pagesModeling, Simulation, and Analysis of Permanent-Magnet Motor Drives, The Brushless DC Motor Drivekishan kharelNo ratings yet
- Induction MachinesDocument11 pagesInduction MachinesTayyab HussainNo ratings yet
- Sensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationDocument7 pagesSensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationPhạm Văn TưởngNo ratings yet
- Control system force-voltage analogyDocument18 pagesControl system force-voltage analogyAjeet Kumar shuklaNo ratings yet
- Stepper MotorDocument16 pagesStepper MotorpaviliondmNo ratings yet
- Lab Manual: ACADEMIC YEAR 2015-16Document48 pagesLab Manual: ACADEMIC YEAR 2015-16ramjiNo ratings yet
- Basic BLDC ControllerDocument9 pagesBasic BLDC ControllerRen KiyoshiiNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- DC Motor DrivesDocument35 pagesDC Motor DrivesMahua ChandaNo ratings yet
- Tib Amx ConceptsDocument80 pagesTib Amx ConceptsMahua ChandaNo ratings yet
- Problemas Con MotoresDocument34 pagesProblemas Con MotoresJohn HuaricapchaNo ratings yet
- Brushless DC MotorDocument91 pagesBrushless DC MotorJaffar TayyarNo ratings yet
- Motor ParametersDocument7 pagesMotor ParametersGarapati MurarjiNo ratings yet
- Power Electronics and Drives (9143)Document6 pagesPower Electronics and Drives (9143)Mahua ChandaNo ratings yet
- Computer Networks (Basics) For IBPS IT Officers Exam 2013 - Gr8AmbitionZDocument7 pagesComputer Networks (Basics) For IBPS IT Officers Exam 2013 - Gr8AmbitionZMahua ChandaNo ratings yet
- Computer Networks (Basics) For IBPS IT Officers Exam 2013 - Gr8AmbitionZDocument7 pagesComputer Networks (Basics) For IBPS IT Officers Exam 2013 - Gr8AmbitionZMahua ChandaNo ratings yet
- Paper 3-Fuzzy Controller Design Using FPGA For Photovoltaic Maximum Power Point TrackingDocument8 pagesPaper 3-Fuzzy Controller Design Using FPGA For Photovoltaic Maximum Power Point Trackingtamann2004No ratings yet
- Application Characteristics of PMSM and BDCM MotorsDocument11 pagesApplication Characteristics of PMSM and BDCM MotorssambhanimadhubabuNo ratings yet
- Data SheetDocument10 pagesData SheetMahua ChandaNo ratings yet
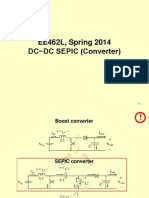
- 8 Ee462l DC DC SepicDocument26 pages8 Ee462l DC DC Sepicchristine geronimoNo ratings yet
- CK 1404Document3 pagesCK 1404Mahua ChandaNo ratings yet
- 110Document4 pages110Aravind SampathNo ratings yet