You might also like
- Acfrogdgl836ldvbuspou Eyl6uhjugculhmtzdojwbgtlkkup E7yn7z3wkk04xjugsulhx0ouzu9rws3smog3t9o06r7-Cs1zavkubqcfvimg43ogdym21jddxoevtgcy ZznougjhwjcxkhnDocument40 pagesAcfrogdgl836ldvbuspou Eyl6uhjugculhmtzdojwbgtlkkup E7yn7z3wkk04xjugsulhx0ouzu9rws3smog3t9o06r7-Cs1zavkubqcfvimg43ogdym21jddxoevtgcy ZznougjhwjcxkhnMOHAMED THARIKNo ratings yet
- Process Control SystemsDocument3 pagesProcess Control SystemsHammad AnsariNo ratings yet
- Exp - P9 - Pressure ControlDocument9 pagesExp - P9 - Pressure ControlPriyanshu LilhaNo ratings yet
- Pid Tuning OperatorDocument18 pagesPid Tuning OperatorkarmoweldingNo ratings yet
- Finn Haugen. Telemark University College National Instruments ConfidentialDocument27 pagesFinn Haugen. Telemark University College National Instruments ConfidentialtriplbingaziNo ratings yet
- El Be Viii Ia Pid ControllerDocument49 pagesEl Be Viii Ia Pid ControllerVaruni SawantNo ratings yet
- Pid Controller Tuning: S.no Name of The ChapterDocument35 pagesPid Controller Tuning: S.no Name of The ChapterAmit TripathiNo ratings yet
- Design and Tuning of Fuzzy Logic PID ControllerDocument19 pagesDesign and Tuning of Fuzzy Logic PID ControllerPriya BhardwajNo ratings yet
- Exp - P6 - Temperature ControlDocument10 pagesExp - P6 - Temperature ControlSiddesh PatilNo ratings yet
- Level Control Trainer FinalDocument6 pagesLevel Control Trainer FinalSiddhartha SharmaNo ratings yet
- Controller TuningDocument5 pagesController TuningSubham SikdarNo ratings yet
- Controller ModesDocument72 pagesController ModesAdnan AkramNo ratings yet
- Report ControlDocument33 pagesReport Controlajwadalfatani100% (5)
- Controller TuningDocument17 pagesController TuningtrshaaaNo ratings yet
- What Is Instrument Hook Up Diagram ? Instrument Hook Up Diagram Is Also Called Installation Drawing, Specifies The ScopeDocument31 pagesWhat Is Instrument Hook Up Diagram ? Instrument Hook Up Diagram Is Also Called Installation Drawing, Specifies The ScopevrajakisoriDasiNo ratings yet
- S10 ExercisesDocument101 pagesS10 Exercisesplim5ollNo ratings yet
- Unit 3Document11 pagesUnit 3mayuraher9511No ratings yet
- Level Control LoopDocument9 pagesLevel Control LoopHriday NathNo ratings yet
- Two Tank Non-Interacting Liquid Level SystemDocument9 pagesTwo Tank Non-Interacting Liquid Level SystemHimanshu JatNo ratings yet
- Closed Loop Response of Temperature Control SystemDocument6 pagesClosed Loop Response of Temperature Control SystemsjsujiprasadNo ratings yet
- Control StrategyDocument44 pagesControl StrategyAyunie FazlinNo ratings yet
- Experiment 8: Temperature Control: 8.1 Objective of The ExperimentDocument11 pagesExperiment 8: Temperature Control: 8.1 Objective of The ExperimentHemavathy RtNo ratings yet
- Chap 07 Marlin 2002Document32 pagesChap 07 Marlin 2002Audrey Patrick KallaNo ratings yet
- Delta Instruments Regulator PIDDocument7 pagesDelta Instruments Regulator PIDRuth Alma CotrutaNo ratings yet
- Chapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGDocument5 pagesChapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGLakshmiNo ratings yet
- Mesb333 Pid ControlDocument13 pagesMesb333 Pid ControlMohd KhairiNo ratings yet
- Temperature Control: On-Off ControllerDocument9 pagesTemperature Control: On-Off Controllerdivyansh kashyapNo ratings yet
- 3 YearsDocument15 pages3 YearsHobi's WaifuNo ratings yet
- Bytronic SistemDocument6 pagesBytronic SistemSedat IriçNo ratings yet
- 1-Introduction To Process ControlDocument30 pages1-Introduction To Process ControlRazif Metta100% (4)
- Process - Control SimulatorDocument7 pagesProcess - Control SimulatorSakshi RajputNo ratings yet
- Department of Petrochemical Engineering College of Technical Engineering University of Polytechnic-DuhokDocument11 pagesDepartment of Petrochemical Engineering College of Technical Engineering University of Polytechnic-DuhokWalid AdnanNo ratings yet
- Chapter 7 - Feedback ControllersDocument44 pagesChapter 7 - Feedback ControllersPravin Nair50% (2)
- 000 Digital Control LecturesDocument67 pages000 Digital Control LecturesPX PRNo ratings yet
- Control Systems Overview Professor GopalankrishnaDocument23 pagesControl Systems Overview Professor GopalankrishnaJameNo ratings yet
- Xmta 7000 PDFDocument4 pagesXmta 7000 PDFjonathan_calixto_4No ratings yet
- Control SystemsDocument18 pagesControl Systemsgayatri jaltareNo ratings yet
- Isd Assignment 2 Prerna Shinde PDFDocument6 pagesIsd Assignment 2 Prerna Shinde PDFNikitesh TambeNo ratings yet
- Exp - P8 - Multiprocess TrainerDocument19 pagesExp - P8 - Multiprocess TrainerSiddesh PatilNo ratings yet
- Instrumentation Engineering Questions & AnswersDocument10 pagesInstrumentation Engineering Questions & AnswerscontgautamNo ratings yet
- Embedded Systems and Control Systems': An Open-Loop ControllerDocument5 pagesEmbedded Systems and Control Systems': An Open-Loop Controllermohed_kamalNo ratings yet
- Hitachi Inverter PID Control Users' GuideDocument16 pagesHitachi Inverter PID Control Users' GuideMirinhaeThiago RosárioNo ratings yet
- Se201 (A4)Document4 pagesSe201 (A4)Mehran Rasheed GorayaNo ratings yet
- Pid TuningDocument10 pagesPid Tuningmohamed abdelhamidNo ratings yet
- Various Types of ControllerDocument59 pagesVarious Types of ControllerZakariyaNo ratings yet
- PID Short QuestionsDocument3 pagesPID Short Questions66umer66No ratings yet
- Controller PrincipleDocument24 pagesController PrinciplePortia ShilengeNo ratings yet
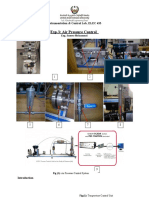
- Exp3 - Air Pressure ControlDocument8 pagesExp3 - Air Pressure ControlDon LawrenceNo ratings yet
- Instruction Sheet Process Trainer 37 100Document4 pagesInstruction Sheet Process Trainer 37 100Abcd123411No ratings yet
- PID Quick Start Guide Twidosuite - 21Document27 pagesPID Quick Start Guide Twidosuite - 21Fernando RodriguesNo ratings yet
- PLCDocument5 pagesPLCAika CatalanNo ratings yet
- Expt. 4 - Pressure ControlDocument16 pagesExpt. 4 - Pressure Controlpleco4meNo ratings yet
- Closed-Loop Control Toolbox APP-RTT-E-GBDocument11 pagesClosed-Loop Control Toolbox APP-RTT-E-GBLuis Enrique PariapazaNo ratings yet
- PID Controllers Explained: Jacques Smuts, PH.DDocument4 pagesPID Controllers Explained: Jacques Smuts, PH.Djenix105No ratings yet
- Control YokogawaDocument59 pagesControl Yokogawafjranggara9180% (5)
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGFrom EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Multisim Education Edition Help 372062L-01 - National InstrumentsDocument2 pagesMultisim Education Edition Help 372062L-01 - National Instrumentscetec1234No ratings yet
- Multi Sim Tutorial 2Document9 pagesMulti Sim Tutorial 2Deepesh SharmaNo ratings yet
- M1348 PDFDocument4 pagesM1348 PDFcetec1234100% (1)
- G31T-M V2aDocument56 pagesG31T-M V2aKostas HilakisNo ratings yet
- Msp430f135 - Mixed Signal MCUDocument67 pagesMsp430f135 - Mixed Signal MCUJason RobinsonNo ratings yet
- Pactware en 9 2014Document8 pagesPactware en 9 2014cetec1234No ratings yet
- 2061 High Performance HMI White PaperDocument12 pages2061 High Performance HMI White Papersteam100deg8229No ratings yet
- Good HMI Slides PDFDocument13 pagesGood HMI Slides PDFrathnam.pmNo ratings yet
- Patt KanjiDocument1 pagePatt Kanjicetec1234No ratings yet
- EMS ManualDocument12 pagesEMS ManualElkin Julio BlancoNo ratings yet
- HMI Lifecycle Figure 3-1Document1 pageHMI Lifecycle Figure 3-1cetec1234No ratings yet
- FST ReferenceDocument146 pagesFST Referencecetec1234100% (1)
- HMI Standards Review - Aug2012Document43 pagesHMI Standards Review - Aug2012jajajaja21100% (1)
- Human Machine Interface (HMI) Design The GoodDocument10 pagesHuman Machine Interface (HMI) Design The GoodJose J. VazquezNo ratings yet
- THere's A Tree Plan GuideDocument22 pagesTHere's A Tree Plan Guidemeiling_1993No ratings yet
- Beem 103 Test 10 SolDocument9 pagesBeem 103 Test 10 Solcetec1234No ratings yet
- NIST Guide To Supervisory and Data Acquisition-SCADA and Industrial Control Systems Security (2007)Document164 pagesNIST Guide To Supervisory and Data Acquisition-SCADA and Industrial Control Systems Security (2007)thomaswangkoroNo ratings yet
- How To Install Addin 572Document10 pagesHow To Install Addin 572meiling_1993No ratings yet
- s71200 Easy Book en-US en-USDocument304 pagess71200 Easy Book en-US en-USAli Özkan KayaNo ratings yet
- Compact Process Contol SystemDocument4 pagesCompact Process Contol Systemcetec1234100% (1)
- Common Engineering TermsDocument23 pagesCommon Engineering TermsAitazaz Ahsan0% (1)
- AlgorithmsDocument61 pagesAlgorithmsSergeyChepurinNo ratings yet
- WBS Chart Pro - User's GuideDocument187 pagesWBS Chart Pro - User's Guidecetec1234No ratings yet
- Cisco 15 - 2 PDFDocument528 pagesCisco 15 - 2 PDFMoises ReznikNo ratings yet
- Sap BarcodesDocument59 pagesSap BarcodesDarmin MemiševićNo ratings yet
- QAch 02Document13 pagesQAch 02Rami Alnajjar100% (1)
- Unit-I Introduction To Erp Enterprise Resource Planning (ERP) Is An Integrated Computer-Based SystemDocument51 pagesUnit-I Introduction To Erp Enterprise Resource Planning (ERP) Is An Integrated Computer-Based Systemchandru5g100% (4)
- Growth of Escherichia Coli in A 5 Litre Batch Fermentation VesselDocument15 pagesGrowth of Escherichia Coli in A 5 Litre Batch Fermentation VesselAs'ad Mughal100% (2)
- D20S-7 Sb1159e01 PDFDocument678 pagesD20S-7 Sb1159e01 PDFGORDNo ratings yet
- Co-Ordinate Measuring Machines & It's Applications: Introduction ToDocument65 pagesCo-Ordinate Measuring Machines & It's Applications: Introduction Toshiva dNo ratings yet
- LTS 3000 SpecificationDocument4 pagesLTS 3000 SpecificationMuhammad Nabil RoslanNo ratings yet
- Russian Codes: Catalog of Regulations Available To OrderDocument2 pagesRussian Codes: Catalog of Regulations Available To OrderHpafin54No ratings yet
- AS9104 2A Form-CDocument3 pagesAS9104 2A Form-C44abcNo ratings yet
- Noise Performance of A Matched Filter PN Code Synchroniser UDocument5 pagesNoise Performance of A Matched Filter PN Code Synchroniser UOmar HamdiNo ratings yet
- SAP ABAP ResumeDocument3 pagesSAP ABAP Resumeshakti1392821No ratings yet
- Hot Products 2014Document8 pagesHot Products 2014inclumarhNo ratings yet
- Ra CocnatsDocument13 pagesRa CocnatsloyioNo ratings yet
- Barrett Light 50Document23 pagesBarrett Light 50Zayd Iskandar Dzolkarnain Al-HadramiNo ratings yet
- CVDocument21 pagesCVAngelica chea NatividadNo ratings yet
- Director Talent Acquisition HR in Fargo ND Resume Tom FennellDocument2 pagesDirector Talent Acquisition HR in Fargo ND Resume Tom FennellTomFennellNo ratings yet
- Performance of Gesture Controlled DroneDocument11 pagesPerformance of Gesture Controlled DroneKrishna SivaNo ratings yet
- Instrumentation For Measurement of Roof Convergence in Coal MinesDocument9 pagesInstrumentation For Measurement of Roof Convergence in Coal MinessamratNo ratings yet
- Safety Data Sheet: Ingredient Einecs Concentration Symbol(s) Risk Phrases ( )Document9 pagesSafety Data Sheet: Ingredient Einecs Concentration Symbol(s) Risk Phrases ( )panagiotis_panagio_2No ratings yet
- ETG3000 BrochureDocument9 pagesETG3000 BrochureMayolo MartinezNo ratings yet
- Jobs Movie ReviewDocument2 pagesJobs Movie ReviewSaleh RehmanNo ratings yet
- Assignment 3 - 2 Microcontrollers With DatasheetsDocument2 pagesAssignment 3 - 2 Microcontrollers With Datasheetsapi-42328551276% (45)
- TMH 2019 2020 Mail PasswordDocument7 pagesTMH 2019 2020 Mail PasswordAni AbrahamyanNo ratings yet
- Tutorial 2 What Is The Output of The Below Program?Document2 pagesTutorial 2 What Is The Output of The Below Program?Sunitha BabuNo ratings yet
- Et154 PDFDocument6 pagesEt154 PDFbytecNo ratings yet
- DIS2116 ManualDocument88 pagesDIS2116 ManualHưng Tự Động HoáNo ratings yet
- 4wd SystemDocument31 pages4wd SystemManuales Transmisiones AutomaticasNo ratings yet
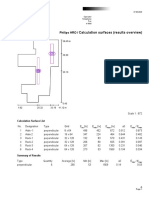
- Calculation Surfaces (Results Overview) : Philips HRODocument4 pagesCalculation Surfaces (Results Overview) : Philips HROsanaNo ratings yet
- Passport Appointment PDFDocument5 pagesPassport Appointment PDFRitu AgarwalNo ratings yet