You might also like
- Solvingsingular Linear EquationDocument49 pagesSolvingsingular Linear EquationtaanjitNo ratings yet
- Annotated 4 Ch4 Linear Regression F2014Document11 pagesAnnotated 4 Ch4 Linear Regression F2014Bob HopeNo ratings yet
- Unit 2-Part 3-Linear RegressionDocument38 pagesUnit 2-Part 3-Linear Regressionsasuke UchihaNo ratings yet
- 2D Geometric Transformations: (Chapter 5 in FVD)Document31 pages2D Geometric Transformations: (Chapter 5 in FVD)Rukmani DeviNo ratings yet
- Example K-Map Simplification: F (X, Y, Z) Xy + Y'z + XZDocument22 pagesExample K-Map Simplification: F (X, Y, Z) Xy + Y'z + XZKshitiz PradhanNo ratings yet
- Scaling: Suppose We Set B C 0, But Let A and D Take On Any Positive ValueDocument15 pagesScaling: Suppose We Set B C 0, But Let A and D Take On Any Positive ValuerajeshNo ratings yet
- Week2-Fuzzy Logic and ReasoningDocument48 pagesWeek2-Fuzzy Logic and ReasoningMohamed mohamedNo ratings yet
- Cartesian Product, Relations, GraphsDocument27 pagesCartesian Product, Relations, Graphssunshine1795No ratings yet
- Norm Methods For Convex-Cardinality ProblemsDocument31 pagesNorm Methods For Convex-Cardinality Problemsmadan_k_nithikNo ratings yet
- Least Square Equation SolvingDocument22 pagesLeast Square Equation Solvingnguyen_anh_126No ratings yet
- MgtutDocument119 pagesMgtutpouyarostamNo ratings yet
- SC Chap3Fall2016 PART IDocument21 pagesSC Chap3Fall2016 PART IMohammed AliNo ratings yet
- Regression (Autosaved) (Autosaved)Document80 pagesRegression (Autosaved) (Autosaved)DishaNo ratings yet
- M 116 Lecture NotesDocument259 pagesM 116 Lecture NotesMaycoEstimar0% (1)
- OCR FP1 Revision SheetDocument11 pagesOCR FP1 Revision SheetstudentofstudentNo ratings yet
- Putnam Linear AlgebraDocument6 pagesPutnam Linear AlgebrainfinitesimalnexusNo ratings yet
- 3-Graph 0Document7 pages3-Graph 0CSP EDUNo ratings yet
- Statistics and Probability Quarter 4 Module 3: X 15, y 164, X y 415, XDocument2 pagesStatistics and Probability Quarter 4 Module 3: X 15, y 164, X y 415, XBreanna CielNo ratings yet
- MHF4U Unit 1Document9 pagesMHF4U Unit 1Daniswara HafidzNo ratings yet
- High-Dimensional Regression. Penalized Likelihood: Topics in Data ScienceDocument108 pagesHigh-Dimensional Regression. Penalized Likelihood: Topics in Data ScienceKadirNo ratings yet
- Topics Entry Test IBEB NonCD Version 2014Document5 pagesTopics Entry Test IBEB NonCD Version 2014YonYonNo ratings yet
- Math 225 Linear Algebra II Lecture Notes: John C. Bowman University of Alberta Edmonton, CanadaDocument61 pagesMath 225 Linear Algebra II Lecture Notes: John C. Bowman University of Alberta Edmonton, CanadaAakash VermaNo ratings yet
- Calculus II Cheat SheetDocument4 pagesCalculus II Cheat SheetajznelsonNo ratings yet
- Chapter 05 - Least SquaresDocument27 pagesChapter 05 - Least SquaresMuhammad IsmailNo ratings yet
- Multivariable Study Guide 2017Document21 pagesMultivariable Study Guide 2017kiwiedonNo ratings yet
- Chiang Ch6Document34 pagesChiang Ch6Hara Tiara PakpahanNo ratings yet
- Grade 11 Types of Functions PDFDocument20 pagesGrade 11 Types of Functions PDFJorea KamaNo ratings yet
- q1 Module 8 Graphing Linear Equations in Two VariablesDocument47 pagesq1 Module 8 Graphing Linear Equations in Two Variablesangela pereyrasNo ratings yet
- Linear Algebra For Computer Vision - Part 2: CMSC 828 DDocument23 pagesLinear Algebra For Computer Vision - Part 2: CMSC 828 DsatyabashaNo ratings yet
- Basic Computer Graphics: Kadi Bouatouch Irisa Email: Kadi@Document35 pagesBasic Computer Graphics: Kadi Bouatouch Irisa Email: Kadi@GopinathGoraGNo ratings yet
- The Line EquationDocument3 pagesThe Line Equationnoname513No ratings yet
- Chapter 5 - Quadratic FunctionsDocument44 pagesChapter 5 - Quadratic FunctionsashNo ratings yet
- ECE 476 Power System AnalysisDocument36 pagesECE 476 Power System AnalysisFady MichealNo ratings yet
- An Idiot Guide To SVMDocument25 pagesAn Idiot Guide To SVMLjiljana Đurić-DelićNo ratings yet
- MathsDocument33 pagesMathsHoudaNo ratings yet
- 4 FWL HandoutDocument12 pages4 FWL HandoutmarcelinoguerraNo ratings yet
- LineIntegrals PDFDocument11 pagesLineIntegrals PDFJia ToorNo ratings yet
- Quadratic Equations in Three FlavorsDocument13 pagesQuadratic Equations in Three FlavorsotterbyteNo ratings yet
- FunctionDocument35 pagesFunctionDae DayNo ratings yet
- Stage 3 Revision Sheet HigherDocument9 pagesStage 3 Revision Sheet Highercozzy'mozzy..dozzy.;No ratings yet
- Graphics 03 Basic Line DDADocument22 pagesGraphics 03 Basic Line DDATanvir AlamNo ratings yet
- Chapter 1Document28 pagesChapter 1Mariam Ahmed HassanNo ratings yet
- Math Workshop by SlidesgoDocument35 pagesMath Workshop by SlidesgoAyesha Nayyer100% (1)
- 2D Geometrical Transformations: Foley & Van Dam, Chapter 5Document34 pages2D Geometrical Transformations: Foley & Van Dam, Chapter 5Vincent VetterNo ratings yet
- Nonlinear Programming PDFDocument224 pagesNonlinear Programming PDFLina Angarita HerreraNo ratings yet
- X InterceptDocument8 pagesX Interceptapi-126876773No ratings yet
- Ridge Regression: Ryota Tomioka Department of Mathema6cal Informa6cs The University of TokyoDocument53 pagesRidge Regression: Ryota Tomioka Department of Mathema6cal Informa6cs The University of TokyoRyota TomiokaNo ratings yet
- Prob RV Opt BasicsDocument35 pagesProb RV Opt BasicsjfdweijNo ratings yet
- 7 NonlinearDocument48 pages7 NonlinearWilliamNo ratings yet
- Equations and GraphsDocument15 pagesEquations and Graphsyusi rizaNo ratings yet
- Chapter 1 Lessons Student VersionDocument25 pagesChapter 1 Lessons Student VersionasprinkyNo ratings yet
- 1 Why Demand Analysis/estimation?: P MC PDocument8 pages1 Why Demand Analysis/estimation?: P MC Pdshyllon7428No ratings yet
- Line Circle AlgorithmDocument33 pagesLine Circle Algorithmaerobala16No ratings yet
- Quantile RegressionDocument43 pagesQuantile RegressionSavita KayNo ratings yet
- Final Review 2024Document16 pagesFinal Review 2024lxbloc.iugc.comsNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Lecture 5Document25 pagesLecture 5satyabashaNo ratings yet
- Linear Algebra For Computer Vision - Part 2: CMSC 828 DDocument23 pagesLinear Algebra For Computer Vision - Part 2: CMSC 828 DsatyabashaNo ratings yet
- Lect1 General BackgroundDocument124 pagesLect1 General BackgroundUgonna OhiriNo ratings yet
- 4 Lecture 4 (Notes: J. Pascaleff) : 4.1 Geometry of V VDocument5 pages4 Lecture 4 (Notes: J. Pascaleff) : 4.1 Geometry of V VsatyabashaNo ratings yet
- Lecture 4Document9 pagesLecture 4satyabashaNo ratings yet
- Elementary Data Structures: Steven SkienaDocument25 pagesElementary Data Structures: Steven SkienasatyabashaNo ratings yet
- Lecture 4Document9 pagesLecture 4satyabashaNo ratings yet
- Lecture 3Document4 pagesLecture 3satyabashaNo ratings yet
- Image Analysis: Pre-Processing of Affymetrix ArraysDocument14 pagesImage Analysis: Pre-Processing of Affymetrix ArrayssatyabashaNo ratings yet
- Lecture 3Document18 pagesLecture 3satyabashaNo ratings yet
- Image Formation in Man and MachinesDocument45 pagesImage Formation in Man and MachinessatyabashaNo ratings yet
- Topics To Be Covered: - Elements of Step-Growth Polymerization - Branching Network FormationDocument43 pagesTopics To Be Covered: - Elements of Step-Growth Polymerization - Branching Network FormationsatyabashaNo ratings yet
- History British I 20 Wil S GoogDocument709 pagesHistory British I 20 Wil S GoogsatyabashaNo ratings yet
- Lecture 2Document3 pagesLecture 2satyabashaNo ratings yet
- Program Analysis: Steven SkienaDocument20 pagesProgram Analysis: Steven SkienasatyabashaNo ratings yet
- Asymptotic Notation: Steven SkienaDocument17 pagesAsymptotic Notation: Steven SkienasatyabashaNo ratings yet
- Brightness: and CDocument39 pagesBrightness: and CsatyabashaNo ratings yet
- Genomic Signal Processing: Classification of Disease Subtype Based On Microarray DataDocument26 pagesGenomic Signal Processing: Classification of Disease Subtype Based On Microarray DatasatyabashaNo ratings yet
- Lecture 2Document15 pagesLecture 2satyabashaNo ratings yet
- A Christopher Hitchens Bookshelf-9Document2 pagesA Christopher Hitchens Bookshelf-9satyabashaNo ratings yet
- Roleplayer: The Accused Enchanted ItemsDocument68 pagesRoleplayer: The Accused Enchanted ItemsBarbie Turic100% (1)
- Fusion Implementing Offerings Using Functional Setup Manager PDFDocument51 pagesFusion Implementing Offerings Using Functional Setup Manager PDFSrinivasa Rao Asuru0% (1)
- Oracle Forms & Reports 12.2.1.2.0 - Create and Configure On The OEL 7Document50 pagesOracle Forms & Reports 12.2.1.2.0 - Create and Configure On The OEL 7Mario Vilchis Esquivel100% (1)
- Chapter3 Elasticity and ForecastingDocument25 pagesChapter3 Elasticity and ForecastingGee JoeNo ratings yet
- Gemini Dollar WhitepaperDocument7 pagesGemini Dollar WhitepaperdazeeeNo ratings yet
- Duavent Drug Study - CunadoDocument3 pagesDuavent Drug Study - CunadoLexa Moreene Cu�adoNo ratings yet
- B.SC BOTANY Semester 5-6 Syllabus June 2013Document33 pagesB.SC BOTANY Semester 5-6 Syllabus June 2013Barnali DuttaNo ratings yet
- Sba 2Document29 pagesSba 2api-377332228No ratings yet
- Ob NotesDocument8 pagesOb NotesRahul RajputNo ratings yet
- Lesson 5 Designing and Developing Social AdvocacyDocument27 pagesLesson 5 Designing and Developing Social Advocacydaniel loberizNo ratings yet
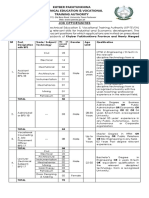
- KP Tevta Advertisement 16-09-2019Document4 pagesKP Tevta Advertisement 16-09-2019Ishaq AminNo ratings yet
- GT-N7100-Full Schematic PDFDocument67 pagesGT-N7100-Full Schematic PDFprncha86% (7)
- WL-80 FTCDocument5 pagesWL-80 FTCMr.Thawatchai hansuwanNo ratings yet
- Role of Personal Finance Towards Managing of Money - DraftaDocument35 pagesRole of Personal Finance Towards Managing of Money - DraftaAndrea Denise Lion100% (1)
- IMS Objectives Targets 2Document2 pagesIMS Objectives Targets 2FaridUddin Ahmed100% (3)
- MASONRYDocument8 pagesMASONRYJowelyn MaderalNo ratings yet
- Decision Making and The Role of Manageme PDFDocument20 pagesDecision Making and The Role of Manageme PDFRaadmaan RadNo ratings yet
- Plaza 66 Tower 2 Structural Design ChallengesDocument13 pagesPlaza 66 Tower 2 Structural Design ChallengessrvshNo ratings yet
- Specificities of The Terminology in AfricaDocument2 pagesSpecificities of The Terminology in Africapaddy100% (1)
- BNF Pos - StockmockDocument14 pagesBNF Pos - StockmockSatish KumarNo ratings yet
- Dialogue Au Restaurant, Clients Et ServeurDocument9 pagesDialogue Au Restaurant, Clients Et ServeurbanuNo ratings yet
- Soft Ground Improvement Using Electro-Osmosis.Document6 pagesSoft Ground Improvement Using Electro-Osmosis.Vincent Ling M SNo ratings yet
- Mark Garside Resume May 2014Document3 pagesMark Garside Resume May 2014api-199955558No ratings yet
- GPS Spoofing (2002-2003)Document8 pagesGPS Spoofing (2002-2003)Roger JohnstonNo ratings yet
- Computing of Test Statistic On Population MeanDocument36 pagesComputing of Test Statistic On Population MeanKristoffer RañolaNo ratings yet
- Mcom Sem 4 Project FinalDocument70 pagesMcom Sem 4 Project Finallaxmi iyer75% (4)
- 18 June 2020 12:03: New Section 1 Page 1Document4 pages18 June 2020 12:03: New Section 1 Page 1KarthikNayakaNo ratings yet
- .Urp 203 Note 2022 - 1642405559000Document6 pages.Urp 203 Note 2022 - 1642405559000Farouk SalehNo ratings yet
- Elements of ArtDocument1 pageElements of Artsamson8cindy8louNo ratings yet
- Work ProblemsDocument19 pagesWork ProblemsOfelia DavidNo ratings yet