You might also like
- Cinématique GraphiqueDocument4 pagesCinématique GraphiqueDABAKH LDEEBOYNo ratings yet
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesFrom EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesNo ratings yet
- TD 10 - Comportement Cinématique Des SystèmesDocument4 pagesTD 10 - Comportement Cinématique Des Systèmesbhs channelNo ratings yet
- 32 Fermeture Geo ExercicesDocument4 pages32 Fermeture Geo Exerciceslaalai faicelNo ratings yet
- TD 09 - Cinématique Analytique - Dérivation VectorielleDocument3 pagesTD 09 - Cinématique Analytique - Dérivation VectoriellemoulyNo ratings yet
- Cinematique GraphiqueDocument5 pagesCinematique GraphiqueRey divino MoukouaNo ratings yet
- Phys - 027 CINEMATIQUE A 2 ET 3 DIMENSIONDocument15 pagesPhys - 027 CINEMATIQUE A 2 ET 3 DIMENSIONRichard KenandiNo ratings yet
- CI05 TD14 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéDocument8 pagesCI05 TD14 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéKhaled JberiNo ratings yet
- TpChaineSolides CorrigéDocument9 pagesTpChaineSolides CorrigéImen HammoudaNo ratings yet
- TD 12 - Comportement Cinématique Des SystèmesDocument10 pagesTD 12 - Comportement Cinématique Des Systèmesbhs channelNo ratings yet
- Série Des Exercices Pour Les Chaines Des SolidesDocument6 pagesSérie Des Exercices Pour Les Chaines Des SolidesleeNo ratings yet
- Devoir de Synthèse N°1 - Génie Mécanique Système D'usinage A Plateau Tournant - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument7 pagesDevoir de Synthèse N°1 - Génie Mécanique Système D'usinage A Plateau Tournant - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineOumayma BoudaboussNo ratings yet
- TD 20 - Lois Entrée-Sortie en Position Et en VitesseDocument10 pagesTD 20 - Lois Entrée-Sortie en Position Et en Vitessebhs channelNo ratings yet
- Chapitre 2 TorseursDocument13 pagesChapitre 2 TorseursHediFatnassiNo ratings yet
- TD 1Document2 pagesTD 1hello 128No ratings yet
- Théorie Des Mécanismes LEq CoursDocument27 pagesThéorie Des Mécanismes LEq CoursEasy Online ServicesNo ratings yet
- DS4 SujetDocument8 pagesDS4 SujetPierre BeckNo ratings yet
- Centre D Usinage 5 Axes CorrigeDocument2 pagesCentre D Usinage 5 Axes CorrigeLAILA IDRISSINo ratings yet
- DS1 MP - 13 - 11 - 21 (Sujet)Document7 pagesDS1 MP - 13 - 11 - 21 (Sujet)LASSOUED WAJDINo ratings yet
- TDDocument6 pagesTDYassir Ez-znafryNo ratings yet
- Devoir Sq8 StatiqueDocument8 pagesDevoir Sq8 StatiqueRuben100% (1)
- 208 Prehenseur CorrigeDocument4 pages208 Prehenseur CorrigeAhmed TalsiNo ratings yet
- Polycopie Cours FaoDocument11 pagesPolycopie Cours FaoRaja EssafiNo ratings yet
- TD N°05 Statique CorrectionDocument9 pagesTD N°05 Statique CorrectionennajiNo ratings yet
- Corrigé Afs2016Document6 pagesCorrigé Afs2016Ibrahim Êl BæzNo ratings yet
- 32 Loi Entrée Sortie Géométrique D 1Document6 pages32 Loi Entrée Sortie Géométrique D 1hsn frk100% (1)
- TD 17 - Liaisons Équivalentes PDFDocument5 pagesTD 17 - Liaisons Équivalentes PDFAbdelhakNo ratings yet
- Cine Graph EleveDocument8 pagesCine Graph EleveMohammed DahbiNo ratings yet
- Modélisation Cinématique Des Liaisons PDFDocument25 pagesModélisation Cinématique Des Liaisons PDFSamir KhNo ratings yet
- Klubprepa Extrait 4758Document4 pagesKlubprepa Extrait 4758Mimita LafleurNo ratings yet
- Roule MentsDocument63 pagesRoule MentsYassine ElbiadNo ratings yet
- Cours Modelisation Des Liaisons PRDocument4 pagesCours Modelisation Des Liaisons PRAgriIT •No ratings yet
- Chap3 Hyperstatisme Et Mobilité Des MécanismesDocument21 pagesChap3 Hyperstatisme Et Mobilité Des Mécanismesmamadou diopNo ratings yet
- Cours CH1 - Cinétique Des Systèmes MatérielsDocument15 pagesCours CH1 - Cinétique Des Systèmes MatérielsAdamNo ratings yet
- Corrigé TD 10 - Comportement Cinématique Des SystèmesDocument5 pagesCorrigé TD 10 - Comportement Cinématique Des Systèmesbhs channelNo ratings yet
- Klubprepa Extrait 4747Document2 pagesKlubprepa Extrait 4747Asmaa KasmiNo ratings yet
- Cours CinetiqueDocument12 pagesCours CinetiquekiiramaNo ratings yet
- Corrigé ARCS 2020Document8 pagesCorrigé ARCS 2020Mouhcine Ben MoussaNo ratings yet
- MECA - Cours 1ADocument3 pagesMECA - Cours 1Acyk4y44No ratings yet
- TD N°1 Cinématique Du Solide Dérivation TemporelleDocument3 pagesTD N°1 Cinématique Du Solide Dérivation TemporelleKiki RotoNo ratings yet
- TD 2 Liaisons Schéma CinématiqueDocument6 pagesTD 2 Liaisons Schéma CinématiqueNadhir MehellouNo ratings yet
- Modélisation Des MécanismesDocument5 pagesModélisation Des MécanismesKamel BousninaNo ratings yet
- S623.2 Comportement Des MecanismesDocument3 pagesS623.2 Comportement Des MecanismesGhada Mouedhen100% (2)
- Schéma CinématiqueDocument1 pageSchéma Cinématiquelephilo57No ratings yet
- Theorie Des Mecanismes PDFDocument9 pagesTheorie Des Mecanismes PDFSafiya TouilNo ratings yet
- Max PIDDocument19 pagesMax PIDmarinmikaelNo ratings yet
- CAM - Rappel Sur Les Liaisons Mécaniques 1Document20 pagesCAM - Rappel Sur Les Liaisons Mécaniques 1Moslem ZariatNo ratings yet
- TD 16 - Liaisons - Schéma CinématiqueDocument4 pagesTD 16 - Liaisons - Schéma Cinématiquebhs channelNo ratings yet
- (RDM) (TD) Transfert FlexionDocument1 page(RDM) (TD) Transfert FlexionKamal ChaibNo ratings yet
- Systemes Isostatiques PDFDocument5 pagesSystemes Isostatiques PDFImmamHadramyNo ratings yet
- 01 Essui Glace de BusDocument2 pages01 Essui Glace de Busaazz38No ratings yet
- Équilibrage Des Solides Tournants Profs PDFDocument8 pagesÉquilibrage Des Solides Tournants Profs PDFfitasmounirNo ratings yet
- MP Physique Centrale 1 2007.enonceDocument11 pagesMP Physique Centrale 1 2007.enonceThomas PiersNo ratings yet
- TD 08Document4 pagesTD 08Abdou HamaouiNo ratings yet
- Theorie de Mecanismes 2021 - Part2Document15 pagesTheorie de Mecanismes 2021 - Part2Amine LaouitiNo ratings yet
- Sec Minesponts 2004 Sic PSIDocument12 pagesSec Minesponts 2004 Sic PSIAlexandre BourrieauNo ratings yet
- CNC Si MP 2009 CG PDFDocument14 pagesCNC Si MP 2009 CG PDFJassir AmgroudNo ratings yet
- Ipeit Ex1 2012Document3 pagesIpeit Ex1 2012JaamesNo ratings yet
- TD MK01 13 14Document22 pagesTD MK01 13 14ayman kaTanaNo ratings yet
- Contraintes PolyDocument12 pagesContraintes PolyEtienne BouronNo ratings yet
- TP Vdi CroiseDocument13 pagesTP Vdi CroiseEtienne BouronNo ratings yet
- La FlexionDocument8 pagesLa FlexionEtienne BouronNo ratings yet
- Meca Flexion CoursDocument4 pagesMeca Flexion CoursSamir2020No ratings yet
- Vdi Modif2Document45 pagesVdi Modif2Etienne BouronNo ratings yet
- Em 190100Document1 pageEm 190100Etienne BouronNo ratings yet
- FlexionDocument21 pagesFlexionMustafa ElalamiNo ratings yet
- 3cours de Fabrication Usinage Par Enlèvement de CopeauxDocument7 pages3cours de Fabrication Usinage Par Enlèvement de CopeauxEtienne BouronNo ratings yet
- Etude Energetique Des Systemes MecaniquesDocument3 pagesEtude Energetique Des Systemes MecaniquesEtienne BouronNo ratings yet
- Etude Energetique Des Systemes MecaniquesDocument3 pagesEtude Energetique Des Systemes MecaniquesEtienne BouronNo ratings yet
- Rseaux de Communication RsidentielsDocument11 pagesRseaux de Communication RsidentielsEtienne BouronNo ratings yet
- Cours Energie MecaniqueDocument5 pagesCours Energie MecaniqueEtienne BouronNo ratings yet
- 06 TravailDocument14 pages06 TravailEtienne BouronNo ratings yet
- Cours Energie MecaniqueDocument5 pagesCours Energie MecaniqueEtienne BouronNo ratings yet
- Systeme de Securite IncendieDocument8 pagesSysteme de Securite IncendieEtienne Bouron100% (2)
- Rappels Sur Les Régles de SoudageDocument4 pagesRappels Sur Les Régles de Soudageprofmeca1388% (8)
- Physique 19 Energie Mecanique Du Systeme Solide RessortDocument4 pagesPhysique 19 Energie Mecanique Du Systeme Solide RessortEtienne BouronNo ratings yet
- Cours de Soudure TIG (Soudage Tungsten Inert Gas)Document2 pagesCours de Soudure TIG (Soudage Tungsten Inert Gas)Etienne BouronNo ratings yet
- Diagramme Schaeffler en LigneDocument2 pagesDiagramme Schaeffler en LigneEtienne BouronNo ratings yet
- Guide Pratique Du Soudeur MMADocument106 pagesGuide Pratique Du Soudeur MMAslimamriNo ratings yet
- TPsoudureDocument8 pagesTPsoudureEtienne BouronNo ratings yet
- Calcul Soudures Statique - Octobre 2008Document19 pagesCalcul Soudures Statique - Octobre 2008Etienne BouronNo ratings yet
- Cotation Pour Les SouduresDocument3 pagesCotation Pour Les SouduresPierre Henninger100% (1)
- A11 Regime VariableDocument14 pagesA11 Regime VariableKhalil LasferNo ratings yet
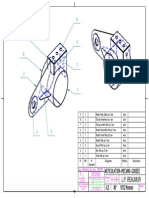
- Articulation Mecano SoudeeDocument8 pagesArticulation Mecano SoudeeEtienne BouronNo ratings yet
- Chap 1Document64 pagesChap 1Etienne BouronNo ratings yet
- 5016 PDFDocument62 pages5016 PDFMeryem BerrNo ratings yet
- Metabolisme EnergetiqueDocument10 pagesMetabolisme EnergetiqueEtienne BouronNo ratings yet
- 2 Mecano Soude IUFM Aix MarseilleDocument7 pages2 Mecano Soude IUFM Aix MarseilleEtienne BouronNo ratings yet
- Rencontre-de-cylindresDocument46 pagesRencontre-de-cylindresVigniko AKAKPONo ratings yet
- 7 Annales Brevet 2013 12 Nouvelle Caledonie CDocument3 pages7 Annales Brevet 2013 12 Nouvelle Caledonie Clouanejacquet29042009No ratings yet
- Colle-04-Dynamique 2TSI 23Document2 pagesColle-04-Dynamique 2TSI 23ASTRO FFNo ratings yet
- Fiche de Progression-Quatrième Année STTDocument1 pageFiche de Progression-Quatrième Année STTjunior basile fofackNo ratings yet
- 27 L Determinants Droites CerclesDocument15 pages27 L Determinants Droites CerclesanasNo ratings yet
- Exercices Triangle Rectangle Et Cercle 2college 4Document3 pagesExercices Triangle Rectangle Et Cercle 2college 46ix9inNo ratings yet
- Barres SinusDocument6 pagesBarres Sinus26bj5v6dh9No ratings yet
- Aires Polygones CerclesDocument2 pagesAires Polygones CerclesLienhard Jean-Luc100% (1)
- IsometriesPlan 1Document1 pageIsometriesPlan 1armdrop5No ratings yet
- 8ss1 Exercices Supplmentaires 6 Et 7Document2 pages8ss1 Exercices Supplmentaires 6 Et 7api-265952656No ratings yet
- Exercices 3 Calcul TrigonométriqueDocument1 pageExercices 3 Calcul Trigonométriqueessadikine anassNo ratings yet
- Projection Dans Le Plan BIDocument4 pagesProjection Dans Le Plan BIJosé NzengoNo ratings yet
- 2020 - Exos Geometrie Vect AnalyDocument59 pages2020 - Exos Geometrie Vect AnalyLux AvijaticarNo ratings yet
- Geometrie 2009 PDFDocument79 pagesGeometrie 2009 PDFsteerooNo ratings yet
- TDN°5 (Produit Scalaire 23-24)Document2 pagesTDN°5 (Produit Scalaire 23-24)ghirarisalwaNo ratings yet
- Applications Simples Corriges D ExercicesDocument2 pagesApplications Simples Corriges D ExercicesAsmae El GharbaouiNo ratings yet
- 1 - TD13 Cinématique Schémas CinématiquesDocument6 pages1 - TD13 Cinématique Schémas CinématiquesCorentin ProdNo ratings yet
- AA3eme Ch04 Racine CarreeDocument7 pagesAA3eme Ch04 Racine CarreeKL TpkosNo ratings yet
- Calcul Vectoriel Dans Le Plan Exercices Non Corriges 5Document8 pagesCalcul Vectoriel Dans Le Plan Exercices Non Corriges 5Fatma DhaouadiNo ratings yet
- Carte Mentale AngleDocument1 pageCarte Mentale AngleBernadette DUMONTNo ratings yet
- Série D'exercices de Révision N°1 - Math Barycentre Et Polynômes - 2ème Sciences (2011-2012) MR HammiMoezDocument2 pagesSérie D'exercices de Révision N°1 - Math Barycentre Et Polynômes - 2ème Sciences (2011-2012) MR HammiMoezSaber MkadmiNo ratings yet
- Cinematique Insa TD 2017 2018Document12 pagesCinematique Insa TD 2017 2018LudovicNo ratings yet
- Cours Trigonométrie 3eme Version ProfDocument2 pagesCours Trigonométrie 3eme Version ProfSwahiboudine MohamedNo ratings yet
- Serie D'exercices Corrigés - Math - Problèmes Du 1er Degrè Et 2nd Degrè - 2ème Sciences (2009-2010)Document6 pagesSerie D'exercices Corrigés - Math - Problèmes Du 1er Degrè Et 2nd Degrè - 2ème Sciences (2009-2010)hiba channel67% (3)
- Evaluation Trimestre 3 Maths cm2 2011Document18 pagesEvaluation Trimestre 3 Maths cm2 2011octaplayNo ratings yet
- Geometrie VectorielleDocument9 pagesGeometrie Vectorielleromain.dallosNo ratings yet
- Cours Physique 1Document55 pagesCours Physique 1luckynombo96No ratings yet
- Barycentre CoursDocument19 pagesBarycentre CoursandoNo ratings yet
- 9a11 BTVN 3-11-2021Document1 page9a11 BTVN 3-11-2021Thái PhạmNo ratings yet
- Serie 11 Cinématique - TranslationDocument4 pagesSerie 11 Cinématique - TranslationSamir LoqmaneNo ratings yet