Professional Documents
Culture Documents
Numerical Investigation and Performance Characteristic Mapping of
Uploaded by
HrvojeDJOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Numerical Investigation and Performance Characteristic Mapping of
Uploaded by
HrvojeDJCopyright:
Available Formats
Lehigh University
Lehigh Preserve
Teses and Dissertations
1-1-2012
Numerical Investigation and Performance
Characteristic Mapping of an Archimedean Screw
Hydroturbine
William Christopher Schleicher
Lehigh University
Follow this and additional works at: htp://preserve.lehigh.edu/etd
Tis Tesis is brought to you for free and open access by Lehigh Preserve. It has been accepted for inclusion in Teses and Dissertations by an
authorized administrator of Lehigh Preserve. For more information, please contact preserve@lehigh.edu.
Recommended Citation
Schleicher, William Christopher, "Numerical Investigation and Performance Characteristic Mapping of an Archimedean Screw
Hydroturbine" (2012). Teses and Dissertations. Paper 1270.
NUMLRICAL INVLS1IGA1ION AND
PLRIORMANCL CHARAC1LRIS1IC
MAPPING OI AN ARCHIMDLAN SCRLW
HYDRO1URBINL
by
\. Chris Schleicher
A 1hesis
Presented to the Graduate and Research Committee
o Lehigh Uniersity
in Candidacy or the Degree o
Master o Science
in
Mechanical Lngineering
Lehigh Uniersity
Noember 14, 2012
ii
1his thesis is accepted and approed in partial ulillment o the requirements or the
Master o Science in Mechanical Lngineering.
_____________________________________
Date Approed
________________________________________
Dr. Alparslan Oztekin
Adisor
_________________________________________
Dr. D. Gary larlow
Department Chair Person
iii
1ABLL Ol CON1LN1S
1able o Contents ....................................................................................................................................... i
List o igures ................................................................................................................................................
Acknowledgments .....................................................................................................................................ii
Nomenclature ........................................................................................................................................... iii
Chapter 1 ................................................................................................................................................ 1
Introduction ................................................................................................................................... 1
lydro 1urbine Classiication ...................................................................................................... 2
1he Computational lluid Dynamics Methodology ................................................................
Chapter 2 ............................................................................................................................................. 11
Design and Meshing .................................................................................................................. 11
Chapter 3 ............................................................................................................................................. 1
Modeling and Numerical Method ........................................................................................... 1
Chapter 4 ............................................................................................................................................. 23
Results and Discussion .............................................................................................................. 23
1he Rotating Mesh Method ..................................................................................................... 28
1he Rotating lrame o Reerence Method ........................................................................... 34
Method Comparison.................................................................................................................. 40
1he Lect o llow Rate on the llow Regime ..................................................................... 42
1he Lect o Rotation Rate on the llow Regime ............................................................... 52
Uniorm ersus Non-uniorm Pitch ....................................................................................... 62
Mapping o Perormance Characteristics .............................................................................. 6
Chapter 5 ............................................................................................................................................. 3
Conclusions ................................................................................................................................. 3
Bibliography ............................................................................................................................................... 5
Vita ..............................................................................................................................................................
i
LIS1 Ol lIGURLS
^vvber Page
ligure 1: Schematic o Lester Pelton's Patent |3[ .................................................................................. 4
ligure 2: Original Schematic o a lrancis 1urbine |5[ ......................................................................... 5
ligure 3: Lxample o a 1ypical Kapln 1urbine |6[ ............................................................................... 6
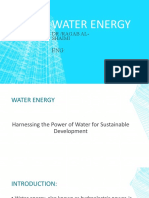
ligure 4: a, Uniormly Pitched Blades, b, Non-uniormly pitched blades based on a Power
Relationship, c, Non-uniormly Pitched Blades Based on an Arctangent Relationship12
ligure 5: Lxample Domain and Mesh Used in the Inestigation a, 1he Lntire domain b,
Cross-sectional View rom the Outlet c, Surace Mesh on the 1urbine Blade ...... 14
ligure 6: Normalized lead oer 1ime ................................................................................................ 24
ligure : Normalized Power oer 1ime .............................................................................................. 25
ligure 8: Normalized Liciency oer 1ime ........................................................................................ 26
ligure 9: 1otal Pressure Contours at the Surace o the Blade ....................................................... 30
ligure 10: Velocity Vectors in the Stationary lrame ......................................................................... 31
ligure 11: Velocity Contour along the Meridional o the Computational Domain .................... 32
ligure 12: Contours o the \all Shear Stress on the Surace o the Blade ................................... 33
ligure 13: 1otal Pressure Contours at the surace o the Blade ...................................................... 35
ligure 14: Velocity Vectors in the Stationary lrame ......................................................................... 36
ligure 15: Velocity Contour along the Meridional o the Computational Domain .................... 3
ligure 16: Vortex Rope with a Swirling Strength o 26.1 rad,s .................................................... 38
ligure 1: Contours o the \all Shear Stress on the Surace o the Blade ................................... 39
ligure 18: 1otal Pressure Contour at the Surace o the Blade - llow Rate 0.05 CMS .............. 44
ligure 19: 1otal Pressure Contours at the Surace o the Blade - llow Rate 0.2 CMS .............. 45
ligure 20: Velocity Vectors in the Stationary lrame - llow Rate 0.05 CMS ................................ 46
ligure 21: Velocity Vectors in the Stationary lrame - llow Rate 0.2 CMS .................................. 4
ligure 22: Velocity Contour along the Meridional o the Computational Domain - llow Rate
0.05 CMS ..................................................................................................................................... 48
ligure 23: Velocity Contour along the Meridional o the Computational Domain - llow Rate
0.2 CMS ........................................................................................................................................ 49
ligure 24: Contours o the \all Shear Stress on the Surace o the Blade - llow Rate 0.05
CMS .............................................................................................................................................. 50
ligure 25: Contours o the \all Shear Stress on the Surace o the Blade - llow Rate 0.2 CMS51
ligure 26: 1otal Pressure Contour at the Surace o the Blade - Rotation Rate 250 RPM ........ 54
ligure 2: 1otal Pressure Contour at the Surace o the Blade - Rotation Rate 500 RPM ........ 55
ligure 28: Velocity Vectors in the Stationary lrame - Rotation Rate 250 RPM .......................... 56
ligure 29: Velocity Vectors in the Stationary lrame - Rotation Rate 500 RPM .......................... 5
ligure 30: Velocity Contour along the Meridional o the Computational Domain - Rotation
Rate 250 RPM ............................................................................................................................. 58
ligure 31: Velocity Contour along the Meridional o the Computational Domain - Rotation
Rate 500 RPM ............................................................................................................................. 59
^vvber Page
ligure 32: Contours o the \all Shear Stress on the Surace o the Blade - Rotation Rate 250
RPM .............................................................................................................................................. 60
ligure 33: Contours o the \all Shear Stress on the Surace o the Blade - Rotation Rate 500
RPM .............................................................................................................................................. 61
ligure 34: 1otal Pressure Contours at the Surace o the Blade - Uniorm Pitch ....................... 63
ligure 35: Velocity Vectors in the Stationary lrame - Uniorm Pitch ........................................... 64
ligure 36: Velocity Contour along the Meridional o the Computational Domain - Uniorm
Pitch .............................................................................................................................................. 65
ligure 3: Contours o the \all Shear Stress on the Surace o the Blade - Uniorm Pitch ..... 66
ligure 38: Calculated lead as a lunction o llow Rate or arious Rotation Rates .................. 68
ligure 39: Calculated Power as a lunction o llow Rate or arious Rotation Rates ................ 69
ligure 40: Calculated Power ,closer look, as a lunction o llow Rate or arious Rotation
Rates .............................................................................................................................................. 0
ligure 41: Calculated Liciency as a lunction o llow Rate or arious Rotation Rates ......... 1
i
ACKNO\LLDGMLN1S
1he author wishes to express sincere appreciation to Proessor Alparslan Oztekin or
his assistance in the preparation o this manuscript. In addition, special thanks to the
Proessors Garrison, Dr. lelix llemming, Dr. Jason laust, Michael Grat, and the Voith
lydro amily in \ork, Pennsylania. \our inspirations played a major role in the orming o
this thesis. Also the author would like to extend a special thanks and appreciation to Robert
Kline. \ithout his eorts, this thesis would not hae been possible.
ii
NOMLNCLA1URL
t 1ime | s [ Density | kg m
-3
[ k
1urbulent Kinetic
Lnergy |[
u Velocity | m s
-1
[ ,
Local Dynamic Viscosity
| kg m
-1
s
-1
[
,t
1urbulent Viscosity
| kg m
-1
s
-1
[
k Constant | 1.0 [ Pk Production o k
1urbulent Dissipation |
[
Constant | 1.3 [ C1 Constant | 1.42 [ C
Constant | [
C2 Constant | 1.68 [ C, Constant | 0.0845 [ Constant | [
0 Constant | 4.8 [ Constant | 0.012 [ S
Modulus o the mean
rate-o-strain tensor
Sij Rate-o-strain tensor
Aerage Local
Velocity | m s
-1
[
uag
Aerage Velocity | m s
-1
[
I 1urbulent Intensity | [ l
Characteristic
Length | m [
Dl
lydraulic Diameter | m
[
uP
Mean Velocity o the
lluid at the Near-wall
node P | m s
-1
[
U
lriction Velocity | m s
-1
[ w
\all Shear Stress
| kg m
-1
s
-2
[
B Parametric Constant | [ L
Lmpirical Constant
| 9.93 [
yp
Distance to the \all
rom the Adjacent Cell
Centroid | m [
Von Karman Constant r Roughness lunction | [
ltur
b.
Calculated 1urbine
lead | m [
Pturb.
Calculated 1urbine
Power | \ [
turb
.
Calculated 1urbine
Liciency | [
PStat
.-Dyna
m.
Change in Stat. and
Dynam. Pressure | Pa [
w
Density o \ater
| kg m
-3
[
blad
e
1orque on the 1urbine
Blade | N m [
blade
Rotation Rate o the
Blade | rad s
-1
[
Q
Volumetric llow Rate
|m
3
s
-1
[
X x-coordinate | m [ \ y-coordinate | m [
Z z-coordinate | m [ t Parametric Variable | [ N
Number o Blade
Rotations | [
m Constant | 1.5 [ L
Shat Length
| 0.4953 m [
lshat
Current Location Along
the Shat Length | m [
1
ABS1RAC1
Computational lluid Dynamics ,ClD, is a crucial tool in the design and analysis o
hydraulic machinery, especially in the design o a micro hydro turbine. 1he micro hydro
turbine in question is or a low head ,less than 60 meters,, low olumetric low rate ,0.005
m
3
,s to 0.5 m
3
,s, application with rotation rates arying rom 200 RPM to 1500 RPM. 1he
design o the runner geometry is discussed, speciically a non-uniorm Archimedean Spiral
with an outer diameter o 6 inches and length o 19.5 inches. 1he transient simulation method,
making use o a rame o reerence change and a rotating mesh between time-steps, is
explained as well as the corresponding boundary conditions. Both simulation methods are
compared and are determined to produce similar results. 1he rotating rame o reerence
method was determined to be the most suitable method or the mapping o perormance
characteristic such as required head, torque, power, and eiciency. Results o simulations or a
non-uniorm Archimedean Spiral are then presented. lirst, a spectral and temporal
conergence study is conducted to make sure that the results are independent o time-step and
mesh selection. Perormance characteristics o a non-uniorm pitched blade turbine are
determined or a wide range o olumetric low rates and rotation rates. 1he maximum
eiciency o the turbine is calculated around 2 or the design o the turbine blade
considered in the present study.
2
C b a p t e r 1
IN1RODUC1ION
larnessing the power o lowing water has been done or many millennia, with
examples dating back 2000 years ago in China and Greece where the water wheel was used to
grind wheat into lour |1[ |2[. 1oday, hydropower is used to supply the world with 20 percent
its electricity needs |3[.
lydropower has a long history within the United States. Niagra lalls was the irst
location in the United States where a hydroelectric plant was installed, but it was not until ater
\orld \ar I that hydroelectric plant design became standardized |2[. In this time, about 40
percent o the United States power generation came rom these hydroelectric plants, howeer,
today hydropower proides about six percent o the United States` electricity |2[.
Clean, renewable energy is a hot topic in the modern power generation ield.
lydropower is a perect means to ulill these two requirements. lydropower is renewable
because it relies on natural precipitation cycles and is clean because it produces no air
pollution. A hydroelectric acility can take many orms: using a reseroir, using channels to
redirect low rom a rier, or a pump storage acility using an upper and lower reseroir |4[.
1he majority o the arguments against hydropower are enironmental and aesthetic in nature.
Constructing a reseroir can aect the oxygen leels downstream o the reseroir and can
aect the plant, aquatic and nearby habitats o land-dwelling animals or example |4[. Large
scale hydropower, deined by the U. S. Department o Lnergy as a acility that can produce
more than thirty megawatts o power, also has high capital costs |4[.
3
Micro-hydro applications are an excellent way to address these negatie issues o large
scale hydropower. Micro-hydro is a small scale application o these larger units and has the
adantage that it can work with the surrounding enironment with little impact. More
speciically, a hydrokinetic application would suite these needs well. A hydrokinetic application
would allow the turbine to be submerged in a moing stream and make use o the current to
generate electricity. 1his application would not require the use o a reseroir or a diersion in
the rier, which makes this application more enironmentally riendly.
lydrokinetic micro-hydropower generation would be excellent or arming or remote
places. 1his application would hae a direct beneit in rural areas by producing reenue to
repay irrigation acilities and proiding power or other arming or domestic purposes |2[. lor
remote locations, hydropower can een be a cheaper alternatie than haing power lines
brought to the location rom the main power grid. It may take a ew years to pay o the capital
inestment or these micro hydro installations, but once the system is paid o the installation
will begin to net proit.
1his thesis will ocus mainly on the design, simulation, and characterization o a non-
uniorm pitch Archimedes screw. It will discuss the low regime that is deeloped by this
turbine. Dierent simulation methods will be introduced and compared.
l\DRO 1URBINL CLASSIlICA1ION
1here are two primary classiications o hydro turbines: reaction and impulse turbines.
Reaction turbines are ully immersed in water and rely on a pressure dierence across the
4
blade passages to spin the turbine. An impulse turbine is not immersed and conerts the high
pressure upstream o the turbine to a ast jet that strikes the turbine buckets, turning the
turbine.
1he type o turbine that is appropriate or a speciic application is dependent on the
aailable head and low rates seen by the turbine. 1he aailable head will determine the shape
o the turbine, while the low rate will determine the size o the turbine |3[.\ith head and low
rate known, there are three basic hydro turbine designs that are commonly used today: Pelton,
lrancis, and Kaplan turbines.
ligure 1: Schematic o Lester Pelton's Patent |3[
5
1he Pelton \heel was inented by Lester Pelton around 1880 |3[. A schematic o this
design is pictured in ligure 1. 1his design makes use o a high head ,around 300 to 400
meters, to channel luid into one to three nozzles that spray onto bucks on the rotor |3[. 1he
buckets then delect the low ideally 180 degrees rom its inlet direction which allows or the
rotor to turn. A Pelton turbine is thereore classiied as an impulse machine and has peak
eiciencies around 90 |3[.
ligure 2: Original Schematic o a lrancis 1urbine |5[
6
1he lrancis turbine was inented by James B. lrancis around the mid 1850`s |5[. le
was looking at reinenting a waterwheel and discoered that by turning it on its side and
making a ew other modiications, he could increase the wheel`s eiciency rom around 65
to about 88 |5[. 1he application or a lrancis turbine is in a moderate` range o head |3[.
ligure 2 is an original schematic o a lrancis turbine. Key eatures to a lrancis turbine are the
olute or spiral case, stationary guides called stay anes, rotatable guides called wicket gates,
and the lrancis runner itsel. 1his machine is considered as a reaction turbine.
ligure 3: Lxample o a 1ypical Kapln 1urbine |6[
linally the Kaplan was designed by Viktor Kaplan around 1929 |6[. 1his machine is
noted or its high eiciency oer a wide range o operation |6[. Components o a Kaplan
turbine can be ery similar to that o a lrancis turbine, with the exception that a Kaplan
turbine operates axially rather than radially |3[. Some units een aoid the hassle o conerting
the radial low to an axial low all together and are strictly axial machines such as a bulb turbine
|3[. ligure 3 is an example o a typical Kaplan turbine.
1lL COMPU1A1IONAL lLUID D\NAMICS ML1lODOLOG\
Computational lluid Dynamics ,ClD, is a tool widely used in industry today, and has
it`s deeloping roots back in the 1950`s and 1960`s or trying to sole or the low oer blunt
bodies at supersonic speeds |[. 1his problem was o interest because o ICBM`s and later the
space program and perplexed many scholars o the time. 1oday this problem has been reduced
to a mere homework assignment or students studying luid mechanics. 1his goes to show the
progress that has been made in the past hal century in this ield has made remarkable leaps in
how these numerical methods help scientists and engineers sole practical problems or our
time.
1here is a set methodology behind planning and implementing a ClD solution. 1his
being geometry creation, grid generation, choosing appropriate models, supplying appropriate
boundary conditions, inding an appropriate solution to the goerning equations and boundary
conditions, and post-processing the results o the computation. 1hese six basic steps are
common in any ClD problem no matter what is to be studied.
8
Geometry generation is usually carried out by Computer Aided Design ,CAD, or 3D
modeling package. Attention has to be made to simpliying the geometry so that a satisactory
grid can be generated in the next step. leatures such as illets or ery small clearances relatie
to the size o the computational domain are usually neglected at this time because their
presence usually has little eect on the calculated low ield or the computational resources
required to model these eatures outweigh what is aailable. In regards to turbo-machinery
objects such as illets o the blades to the hub, a requirement or the structural integrity o the
runner, are usually ignored at this stage. Also, the clearance between the runner blade and the
shroud, usually on a scale o a couple millimeters as compared to a ew meters in diameter or
the runner itsel, is not modeled due to computational limitations.
In the next phase, a grid or mesh is generated rom the input geometry. 1here are
seeral considerations that must be taken into account in what will make up the grid.
loremost, the kind o grid must be chosen such as a structured, block structured,
unstructured, or hybrid grid based on actors such as personal experience, computational
limitations, and how sensitie the solution is to the implementation o the chosen grid |[.
Other considerations are i the solution is iscous, then a mesh resoling the boundary layer
must be considered or i the solution is turbulent, then appropriate irst cell layer \plus alues
should be met.
lollowing grid generation, the appropriate models must be chosen or the problem at
hand. Questions such as must the solution be in 3D or can it be simpliied to a 2D problem
without sacriicing too much accuracy to the results need to be determined. It should also be
known i the problem is a steady-state or transient in nature. \ill an incompressible
continuum assumption be alid I not, will heat transer play an important role in a
9
compressible scenario Is the low laminar, turbulent, or een both 1hese are just some o the
major principles that must be thought o careully at this point in this methodical process.
1here are other considerations too, such as i the low is multiphase, contains a chemical
reaction, or i there is a moement in the geometry inoled |[.
Once an appropriate model is chosen or the goals o the simulation, the boundary
conditions are supplied. Control olume principles such as inlets and outlets o the oerall
computational domain are speciied with parameters such as elocities, static pressures, mass
low rates, temperatures, and turbulence conditions. \alls o the domain are also speciied and
are gien conditions such as i they are rotating or translating in space, i they are ideal no-slip
walls or hae a speciied wall roughness, and i a speciied shear stress is applied by the
working luid on the wall. Periodic boundary conditions can be supplied when a luid particle
leaes one surace o the computational domain and reenters the domain on a speciied
surace. Such a boundary condition is a useul approximation in turbo-machinery allowing only
a single blade or guide ane to be numerically modeled instead o the entire cascade. linally,
interaces between computational domains can be speciied or solutions requiring multiple
reerence rames where the results at a boundary or one domain can be interpolated onto a
coexisting boundary. 1his can increase the complexity o the solution, but at the same time
allow or a more stable and accurate solution i implemented correctly.
At this point, a solution is ready to be calculated. \riting homemade code is a
possibility, but today there are many commercially aailable ,ClX, lluent, S1AR-CD, etc., and
open-source codes ,OpenlOAM, where a solution can be calculated. Input parameters such
as the number o maximum iterations or in the case o a transient problem, the number o
time-steps, time-step size, and maximum iterations per time-step must be supplied. One
10
cannot just simply run the calculation and wait or a inal result, close monitoring o the
solution is usually required or the computational luid dynamics simulations o complex
geometries such as the one considered in this work. Plots such as the RMS or maximum cell
residuals between calculations or each equation soled in each outer iteration o the solution
should be monitored or alues approaching zero. I the residuals are zero, this means that the
calculated alue between iterations has not changed thus a solution may hae conerged. A
solution may hae conerged and not deinitely conerged because along with residuals, key
perormance characteristics based on the goals o the calculation should be monitored or
conergence on a reasonable alue.
linally, once the solution is determined to be conerged, the ruits o the labor can be
reaped rom post-processing the calculated solution. lere streamlines, contours, elocity
ectors, and other ascinating eatures can be impressiely calculated and displayed with ease.
lere though it takes a person amiliar both with the problem at hand and the numerical
methods used to derie the solution to determine i this result makes physical sense. I in any
o the preious steps an improper assumption or implementation o a model or boundary
condition is applied, the post-processed results are nothing more than impressie igures o
conditions that do not make any physical sense.
11
C b a p t e r 2
DLSIGN AND MLSlING
Preiously mentioned were the arious types o standard hydro turbine designs and
their general application. 1his inestigation was ocused on a low head, low olumetric low
rate application o a hydro turbine. Another important requirement was the portability o this
deice. 1his hydro turbine must be easy to transport and set-up by a small team in as little time
possible. linally, the turbine should hae a hydrokinetic application as well. 1his paper will
ocus on the run-o-rier setup, where a head o water would be deeloped by dierging water
rom a rier through a penstock.
1he design chosen to accomplish this task is not a standardized design. A twist on the
Archimedean screw was adapted where the pitch o the screw changed as a unction o shat
length. At the leading edge, the pitch is steep and then transitions to almost perpendicular
pitch to the low direction at the trailing edge. 1he idea behind this design is to be able to hae
more control o the pressure dierence between the pressure side and suction side o the
blades, allowing or more torque to be extracted rom the luid as opposed to a more
traditional uniormly pitched Archimedean screw.
ligure 4: a, Uniormly Pitched Blades, b, Non
Relationship, c, Non-uniormly Pitched Blades Based on an Arctangent Rel
12
a, Uniormly Pitched Blades, b, Non-uniormly pitched blades based on a Power
uniormly Pitched Blades Based on an Arctangent Relationship
13
Pictured in ligure 4 are some examples o geometries that were inestigated or this
application. ligure 4a represents a standard Archimedean screw that has uniorm pitch rom
leading to trailing edges. ligure 4b and c represent the non-uniormly pitched Archimedean
screws that were inestigated. 1he pitches o these screws are goerned by equations 1 and 2.
ligure 4b represents the power relationship shown in equation 1. ligure 4c uses similar
equations with the exception o the z-coordinate which is shown in equation 2.
cos
sin
(J)
atan
atan
(2)
In these equations, X, \ and Z are the coordinate locations o the point in question, R
is the radius o the blade, L is the shat length, l
shat
is the current location along the shat`s
length, N is the number o wrapping turns the blade makes around the shat, m is a speciied
constant, and t is a parametric ariable.
1hese equations were used in a MA1LAB script to export points to a text ile. 1his
text ile was then imported into the CAD package Solid\orks to create splines that would
goern the geometry o the blades o the screw. A shat was also added to the geometry at this
stage and once complete, the geometry was exported or numerical inestigation.
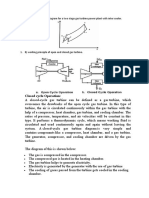
ligure 5: Lxample Domain and Mesh Used in the Inestigation
rom the Outlet c, Surace Mesh on the 1urbi
I
l
o
w
D
i
r
e
c
t
i
o
n
14
: Lxample Domain and Mesh Used in the Inestigation a, 1he Lntire domain b, Cross
rom the Outlet c, Surace Mesh on the 1urbine Blade
a, 1he Lntire domain b, Cross-sectional View
15
lirst, beore a mesh can be generated the size o the computational domain must be
determined. In the run-o-rier design method, water would be dierted rom a body o water
through a hose, pass through the turbine, and be reintroduced into another body o water. 1he
domain or a ClD calculation o this method makes sense to include the screw housed in a
pipe approximately the diameter o the turbine. ligure 5 depicts the schematic o the low
problem. 1he turbine, which has a hydraulic diameter o six inches and shat length o 19.5
inches, has been placed inside a housing. 1his housing is a simple pipe with a hydraulic
diameter o six inches and length o 63.5 inches. lor these simulations, thereore, the gap
between the blade and the housing is not modeled. ligure 5a depicts the entire computational
domain. ligure 5b is a cross section o the mesh on the outlet ace and ligure 5c shows the
surace mesh on the turbine blade itsel.
1he accuracy o results produced through a ClD calculation is only as good as the
mesh that is proided or analysis |8[. 1here are a ew basic meshing techniques such as a
structured or unstructured mesh and the mesh can be comprised o dierent element types.
1he most common element types are hexahedra, tetrahedral, square pyramids and extruded
triangles. Unstructured 3D grids tend to use hexahedra and tetrahedral elements, while
structured grids rely more on quadrilateral and hexahedral elements |9[.
1he mesh used makes use o a ew dierent elements. 1he base element that
comprised the mesh is a hexahedral element. 1etrahedral elements were also used to help
bridge the gap between hexahedral elements when the boundaries could not be resoled well.
In order to resole the boundary layer, prism elements were used by inlating the size o the
16
element by 1.2 times the original prism size to help transition the boundary mesh to the main
hexahedral mesh.
Attention had to be made with the element sizes used in the mesh. Using smaller
elements can improe the accuracy o the solution, but will require more computational
resources and time to generate the solution. Using larger elements eases the computational
requirements o the calculation, but the results may not be as accurate. 1hereore, a balance
between using larger and smaller elements needs to be implemented. Smaller elements should
be used in regions o interest and near wall and larger elements should be placed in regions o
less importance to the solution. A spectral inestigation on the eect o mesh element size on
the solution will be presented later in this paper.
1
C b a p t e r
MODLLING AND NUMLRICAL ML1lOD
Computational lluid Dynamics plays a ital role in the design o turbo-machinery.
1his tool allows or multiple design iterations in a considerably shorter amount o time than
haing to construct a model and running an experiment. \ith computational power increasing
oer the years, this tool becomes an een more robust analysis method. Len though this tool
proides the possibility o a more productie analysis method, the results obtained rom a
simulation are only as good as the inormation in which is proided to the program. 1he tool
has the capability o producing some impressie colorul images, but i the data or method
proided to the simulation does not hae a physical representation, pretty colorul images are
all the results obtained are good or. Lxperience and physical data will lead to more
meaningul, physical results rom this analysis.
1urbo-machinery proides and interesting application or ClD. In the real world, an
impeller is rotating about a central axis at a certain angular speed due to the interaction
between the working luid and the impeller. 1his makes meshing in the area near the impeller
an interesting task. Careul thought should be taken into consideration on how to deal with
this. Since the impeller is rotating, this makes the luid low in this region transient in nature.
1here are two schools o thought to modeling this transient nature. 1he irst is to rotate the
mesh in the region o the impeller at an angular speed equal to the rotation rate o the impeller,
thus computational mimicking the motion o the physical phenomenon o the impeller. 1he
second is to not rotate the mesh itsel, but to rotate the rame o reerence in the region near
18
the impeller at an angular speed equal to that o the impeller rotation rate. 1his allows or a
relatie calculation o the low parameters to this rotating reerence rame. 1he goals o both
these methods are the same, but each has their adantages and disadantages in modeling the
phenomenon in the region near the impeller.
1he method that was ultimately settled on to accomplish modeling the transient nature
o the low near the impeller was using the rame o reerence change. 1he elocity ield was
ormulated relatie to the rotating rame o reerence, and thus two additional terms are added
to the conseration o momentum equation representing the Coriolis and centripetal
accelerations |10[. Lquations or conseration o mass and conseration o momentum take
the ollowing orm:
(3)
(4)
lere v
i
is the relatie elocity ector o the luid, is the luid density, is the angular
elocity ector, P is the pressure,
is the shear stress tensor,
is the external applied orce, t
is the time, and is the dierential ector operator.
Another computational eat that must be accomplished is in modeling turbulent
structures in the low ield. 1hese turbulent structures occur on many dierent length and time
scales, making modeling all possible length and time scales a computational task that is beyond
practical. 1here are a ew dierent turbulence models aailable to accomplish capturing the
19
important turbulent length and time scales. 1he model that was used in this study is a ariant
on the standard k-epsilon model called the renormalized group k-epsilon model.
1he renormalized group analysis o turbulence was irst inestigated by \akhot and
Orszag |11[ in 1986, and a turbulence model was deeloped later in 1992 that oers
improement in modeling turbulence at high Reynolds numbers by remoing the smallest
scales o turbulence, allowing computation o these turbulence scales a more easible task |12[.
1he transport equations are or this method area as ollows:
(S)
(6)
(7)
(8)
In the aboe equations, is the luid density, is the local dynamic iscosity,
t
is the
turbulent iscosity, P is the pressure, k is the turbulent kinetic energy, is the turbulent energy
dissipation, t is the time, x is a position ector, u is a elocity ector, C
,
, C
1
, C
2
,
k
and
are
prescribed constants, C
and are parametric constants, S is the modulus o the mean rate-o-
strain tensor, S
ij
is the rate o strain tensor and the small script i, j and k are ector integers. In
20
these equations, the buoyancy terms hae been neglected. 1he constants used in these
calculations or C
,
, C
1
, and C
2
are 0.0845, 1.42 and 1.68, respectiely.
Boundary conditions play an important role in the accuracy o solutions as well. At the
inlet to the computational domain, a ully-deeloped turbulent elocity proile was assumed.
1he turbine is encased in a pipe-like housing, thus a standard empirical relationship that
goerns the elocity proile is gien by:
(9)
(J0)
lere u is the aerage local elocity, U is the maximum elocity, r is the local radius, R
is the total outer radius, n is a parametric constant, and Re
U
is Reynolds number using the
maximum elocity at the characteristic elocity and the pipe diameter as the characteristic
length. In this relationship, the ratio o the local elocity to the maximum elocity is deined
by the percent distance rom the outer radius o the pipe raised to the inerse an empirical
exponent.
On the inlet and outlet o the domain, parameters o turbulence are deined or
turbulence kinetic energy and turbulent dissipation rate. 1hese parameters were back calculated
through the input parameters o a speciied turbulent intensity and hydraulic diameter. 1hese
parameters, I and D
l,
were 10 and 0.1524 m, respectiely. 1en percent or turbulent
intensity represents a pretty turbulent condition based on a proessional opinion. 1he hydraulic
21
diameter is just the diameter o the encasing. 1his alue is used to determine the length scale
used in the k and epsilon parameters by l ~ 0.0 D
l
. 1he turbulent kinetic energy and
dissipation rate can then be calculated by:
(JJ)
(J2)
lere k is the turbulent kinetic energy, is the turbulent energy dissipation, u
ag
is the aerage
elocity, I is the turbulent intensity, l is a characteristic length scale, and C
is a prescribed
constant. 1hese relationships or the turbulence model were used both on the inlet and outlet
aces o the domain. 1he speciied alues or the turbulent intensity ,I, and hydraulic diameter
,D
l
, were 10 and 0.1524 m, respectiely.
1he turbine is encased in a housing that has a no-slip condition applied to it, and is
assumed to hae hydraulically smooth walls. A modiied equation or the law-o-the-wall is
used to calculate the shear stress acting on the wall |13[.
(J3)
(J4)
In these equations, u
p
is the mean elocity o the luid at the near-wall node p, u
is the riction
elocity,
w
is the wall shear stress, is the luid density, is the Von Karman constant, L is an
empirical constant, y
p
is the distance to the wall rom the adjacent cell centroid, is the
22
dynamic iscosity, B is a parametric constant, C
is a prescribed constant, k is the turbulent
kinetic energy, and
r
is a roughness unction. Since the assumption o hydraulically smooth
walls is in eect, howeer, these equations are not ealuated in the simulations as a boundary
condition.
23
C b a p t e r 1
RLSUL1S AND DISCUSSION
A study was conducted to optimize the mesh, computational domain, and time-step
selection or a transient ClD analysis. Such studies are common in the numerical world to
proe spectral and temporal conergence o the solution |14[ |15[. 1he domain inlet boundary
condition was placed ie inches away rom the leading edge o the impeller, and outlet
boundary condition was placed approximately iteen inches away rom the trailing edge. 1he
additional length at the outlet was to ensure that the outlet boundary condition had little
computational eect on the solution in the region o the runner. 1hree dierent meshes were
used, ranging rom coarse to ine, in order to determine the eect the mesh had on the
calculated solution. 1he general size o the mesh elements and reinement near solid to luid
interaces was aried to determine how the mesh inluences the calculation o perormance
characteristics or the turbine. 1hree dierent meshes were used: a coarse mesh containing
approximately eight hundred thousand elements, a medium mesh with approximately two
million elements, and a ine mesh made up o approximately our million elements. 1hese
meshes were built around the same turbine geometry, with the same boundary conditions
applied to each mesh.
1he head calculated rom the simulations, as a unction o time, can be seen in ligure
6. 1he corresponding power generated rom the interaction between the low and the turbine
blade is displayed in ligure . Based on the low rate, the head, and the torque generated,
eiciency was determined and is shown in ligure 8. In ligure 6 through ligure 8, an initial
24
spike in the alue is obsered with the alues settling around a gien alue as the turbine
reaches steady state. 1able 1 shows the maximum, minimum, and aerage \plus alue along
the blade or each simulation done. 1able 2 displays the maximum, minimum, and aerage
\plus alues, much like 1able 1, only or the housing,wall o the luid.
ligure 6: Normalized lead oer 1ime
25
ligure : Normalized Power oer 1ime
26
ligure 8: Normalized Liciency oer 1ime
2
1able 1: lirst Layer \plus Values on the Blade
Coarse Mesh Medium
Mesh
Iine
Mesh
Min Yplus
(Blade)
1.112 1.89 1.338
Max Yplus
(Blade)
223.464 120.86 65.28
Avg Yplus
(Blade)
60.614 2.9 18.989
1able 2: lirst Layer \plus Values on the lousing
Coarse Mesh Medium
Mesh
Iine
Mesh
Min Yplus
(Housing)
3.411 15.463 8.234
Max Yplus
(Housing)
145.20 2.982 40.64
Avg Yplus
(Housing)
93.99 52.014 25.94
1he result o head ersus time, as seen in ligure 6, shows that the meshes produce a
pseudo-steady-state solution around a time o 0.25 seconds. 1he trade-o between meshes
rom the perspectie o calculated head is that a coarse mesh will tend to conerge on a
pseudo-steady result quicker, but oer predict the alue o head. A iner mesh will suggest a
more accurate range o head, but will take more computational time and resources to settle on
a alue i een at all. 1he medium mesh appears to be a good compromise between the two
trade-os.
lrom the plot o calculated power ersus time, seen in ligure , a similar trend can be
obsered as in the results o head ersus time. 1he coarse and ine meshes appear to agree on
the same pseudo-steady-state alue or power, while the medium mesh predicts a alue slightly
28
higher than the two. Calculated eiciency ersus time is dependent upon the solutions o both
head and power. 1he interaction between these two calculated alues can be seen in ligure 8.
1he irst layer \plus alues, as shown in 1ables 1 and 2, or the three meshes also oer
insight as to why the calculated operating parameters produced the gien results. On the
coarse mesh, the \plus alues were air around the blade, howeer, around the housing the
\plus alues are inappropriate or proper boundary layer resolution. 1his can explain why the
coarse mesh tended to settle on operating parameters and oer predict them compared to the
iner meshes. 1he results show that the element size o the medium mesh is appropriate as a
compromise between computational time and resources and the accuracy o the results.
Special attention should be paid to resoling the boundary layer near the solid-luid interace to
be sure that a more physical result is obtained.
1lL RO1A1ING MLSl ML1lOD
As mentioned earlier, there were two methods inestigated to attempt to capture the
transient nature o the rotating impeller within the computational domain. 1he irst method
that was inestigated was using a rotating mesh, where the mesh rotated at the same angular
speed o the turbine. 1he ollowing results are or a olumetric low o 0.1 m
3
,s with a
rotation rate o 50 RPM. 1he results or the rotating mesh method will be displayed irst,
ollowed by the results rom the rame o reerence method and a comparison between the
two results. ligure 9 depicts the total static and dynamic pressure acting on the runner blades.
1he total pressure is highest near the leading edge o the blade. ligure 10 shows elocity
ectors passing through the computational domain in a stationary rame. Around the trailing
29
edge, the ectors depict a highly turbulent structure that has ormed as expected. ligure 11 is
a contour plot o elocity along the meridional and conirms the presence o a turbulent
structure ater the trailing edge o the blades. linally, ligure 12 displays the wall shear stress
acting on the runner due to the luid low. As the luid approaches the trailing edge o the
runner, the wall shear stress increases dramatically.
30
ligure 9: 1otal Pressure Contours at the Surace o the Blade
I
l
o
w
D
i
r
e
c
t
i
o
n
I
l
o
w
D
i
r
e
c
t
i
o
n
31
ligure 10: Velocity Vectors in the Stationary lrame
32
ligure 11: Velocity Contour along the Meridional o the Computational Domain
33
ligure 12: Contours o the \all Shear Stress on the Surace o the Blade
I
l
o
w
D
i
r
e
c
t
i
o
n
I
l
o
w
D
i
r
e
c
t
i
o
n
34
1lL RO1A1ING lRAML Ol RLlLRLNCL ML1lOD
1he ollowing igures are results or ClD simulations at 0.1 m
3
,s and 50 RPM using
the change o reerence rame method. ligure 13 depicts the total static and dynamic pressure
acting on the runner blades. 1he total pressure is highest near the leading edge o the blade.
ligure 14 shows elocity ectors passing through the computational domain in a stationary
rame. Around the trailing edge, the ectors depict a highly turbulent structure that has ormed
as expected. ligure 15 is a contour plot o elocity along the meridional and conirms the
presence o a turbulent structure ater the trailing edge o the blades. 1he orticy rope that is
present at the trailing edge o the runner as expected rom the elocity ectors is illustrated in
ligure 16. ligure 16 is an excellent illustration o the swirling low structure created by the
motion o the blades. 1he intensity o the ortex decreases away rom the trailing edge o the
blades. linally, ligure 1 displays the wall shear stress acting on the runner due to the luid
low. As the luid approaches the trailing edge o the runner, the wall shear stress increases
dramatically.
ligure
35
ligure 13: 1otal Pressure Contours at the surace o the Blade
I
l
o
w
D
i
r
e
c
t
i
o
n
I
l
o
w
D
i
r
e
c
t
i
o
n
ligure
36
ligure 14: Velocity Vectors in the Stationary lrame
ligure 15: Velocity Contour along the
3
: Velocity Contour along the Meridional o the Computational Domain Domain
ligure 16: Vortex Rope with a Swirling Strength o 26.1 rad,s
38
Vortex Rope with a Swirling Strength o 26.1 rad,s
ligure 1: Contours o the \all Shear Stress on the Surace
39
: Contours o the \all Shear Stress on the Surace o the Blade o the Blade
I
l
o
w
D
i
r
e
c
t
i
o
n
I
l
o
w
D
i
r
e
c
t
i
o
n
40
ML1lOD COMPARISON
Both the rotating mesh and the rotating rame o reerence methods are two dierent
means o producing similar results. ligure 9 and 13 are both total pressure contour plots on
the blades or the same operating conditions, and are displayed with the same color scale. 1he
results between the two igures are almost exactly the same, with some minute exceptions. 1he
rotating mesh method shows that there is a slightly larger high pressure region at the outer
edges o the blade on the leading edge than what was calculated with the rame o reerence
method. It also depicts a similar result rom the low pressure region. 1hese ariances, howeer,
could be due to the act that a dierent mesh was used between the two calculations since the
results were computed at dierent times during this study.
ligure 12 and 15 oer another comparison between the results o the two dierent
methods. 1he notable dierences between the two igures come in the solution starting near
the trailing edge o the blade and heading downstream o the turbine. One noticeable
dierence is in the low elocity region downstream o the turbine. In the rotating mesh
method, we see that the low elocity region is short, and orms the shape o a cone o o the
shat. In the rame o reerence method, we see this low elocity region elongated urther
downstream o the turbine. Again, this could be due to the use o dierent meshes or the
calculations. loweer, the reerence rame method is known to smooth the transient eects
o the solution which could also proide an explanation or the ariation in results |16[.
Dierences between the calculated wall shear stress are also apparent between the two
calculations as seen in ligure 12 and 1. 1he high area o wall shear stress appears to be more
41
predominate in the reerence rame method than the rotating mesh method. Also, on the
rame o reerence method using the same color scale between the two results, there are little
splotches o lower shear stress regions located on the outer radius o the blades in the middle
area o the blades which are not apparent on the same plot or the rotating mesh method.
Moing to a macroscopic iew o the results, the perormance results are similar
between calculations as well. 1he deinition o these perormance parameters will be explained
later in this paper. 1he power calculated by the rotating mesh method has been determined to
be 2248 \atts, as to be compared with the reerence rame method which was determined to
be 2359 \atts. 1he percent dierence between these two results is about 5. 1he calculated
head required or each o these simulations is 3.232 meters or the rotating mesh and 3.224
meters or the reerence rame method, diering by about 0.2. linally, the calculated
eiciency or the rotating mesh is 2 as compared to the reerence rame`s eiciency o 4
or a dierence o about 3. 1hese perormance results indicate that the solutions between
these two methods are similar. 1he reerence rame method appears to hae a higher
prediction in perormance characteristics. It can be due to the mentioned smoothing o the
transient nature o the solution, which is known to oer predict turbulence parameters in k-
epsilon models such as the model used between these two simulations. \ithout any physical
test data such as Laser Doppler Velocimetry ,LDV, measurements, this claim can be hard to
make |1[ |18[ |19[.
42
1lL LllLC1 Ol lLO\ RA1L ON 1lL lLO\ RLGIML
1he eect o olumetric low rate has a strong inluence on the perormance o the
turbine and in the low regime. 1he ollowing igures represent the solution using the rotating
mesh method, with a constant rotation rate o 50 RPM. 1he low rates chosen or these
comparisons are 0.05 m
3
,s, 0.1 m
3
,s and 0.2 m
3
,s.
ligures 9 ,Page 28,, 18 and 19 are comparisons o the total pressure contours at the
surace o the blade or each o the prescribed low rates using the same color scale. ligure 18
is the result or the lower low rate ,0.05 m
3
,s, and shows a pretty een distribution in the total
pressure acting on the blade. As low rate increase to ligure 9 ,0.1 m
3
,s,, it is seen that the
uniorm total pressure distribution has increased, and a much higher pressure gradient is seen
in the trailing edge region. 1his trend is exaggerated een more as the low rate increases to 0.2
m
3
,s in ligure 19 where the gradient is een more apparent.
ligures 10 ,Page 29,, 20 and 21 show insight into the elocity ectors at arious planes
in the computational domain. As expected, the trend shows that elocity increases as low rate
increases. loweer, as the low rate increases the gradient in the elocity ield at the trailing
edge and downstream is much greater. 1he turbulent nature o the low becomes more
apparent as the low rate increases.
ligures 11 ,Page 30,, 22 and 23 depict a elocity contour along the meridional o the
computational domain. As low rate increases the elocity near the trailing edge greatly
increases, and the eect o this increase traels up the blade. Downstream o the turbine, it is
seen that an area o low pressure orms in the center o the domain and depicts the swirling
43
nature o the low ater the trailing edge. 1his can be conirmed with ligure 16 which shows a
model o this swirling structure.
linally ligures 12 ,Page 31,, 24 and 25 compare the calculated wall shear stress by the
luid. As expected as the low rate increases, the wall shear stress increases. It greatly increases
in the trailing edge region especially around the blade-to-shat interace. Both the wall shear
stress and total pressure contours at the higher low rates suggest that the onset o caitation
may be apparent on these suraces. A thesis by a ellow student in this research group by Jacob
Riglin discusses this issue o caitation in more detail |20[.
44
ligure 18: 1otal Pressure Contour at the Surace o the Blade - llow Rate 0.05 CMS
I
l
o
w
D
i
r
e
c
t
i
o
n
I
l
o
w
D
i
r
e
c
t
i
o
n
45
ligure 19: 1otal Pressure Contours at the Surace o the Blade - llow Rate 0.2 CMS
I
l
o
w
D
i
r
e
c
t
i
o
n
I
l
o
w
D
i
r
e
c
t
i
o
n
46
ligure 20: Velocity Vectors in the Stationary lrame - llow Rate 0.05 CMS
4
ligure 21: Velocity Vectors in the Stationary lrame - llow Rate 0.2 CMS
48
ligure 22: Velocity Contour along the Meridional o the Computational Domain - llow Rate 0.05 CMS
49
ligure 23: Velocity Contour along the Meridional o the Computational Domain - llow Rate 0.2 CMS
50
ligure 24: Contours o the \all Shear Stress on the Surace o the Blade - llow Rate 0.05 CMS
I
l
o
w
D
i
r
e
c
t
i
o
n
I
l
o
w
D
i
r
e
c
t
i
o
n
51
ligure 25: Contours o the \all Shear Stress on the Surace o the Blade - llow Rate 0.2 CMS
I
l
o
w
D
i
r
e
c
t
i
o
n
I
l
o
w
D
i
r
e
c
t
i
o
n
52
1lL LllLC1 Ol RO1A1ION RA1L ON 1lL lLO\ RLGIML
1he eect o rotation rate has an inluence on the perormance o the turbine and in
the low regime, but not as strong as low rate. 1he ollowing igures represent the solution
using the rotating mesh method, with a constant low rate o 0.1 m
3
,s. 1he rotation rates
chosen or these comparisons are 250 RPM, 500 RPM, and 50 RPM.
ligures 9 ,Page 28,, 26 and 2 are comparisons o the total pressure contours at the
surace o the blade or each o the prescribed rotation rates using the same color scale. All
three igures show a ery similar solution in the total pressure distribution. 1he only slightly
noticible dierence is the low total pressure region at the trailing edge o the blade arries
slightly. Rotation rate appears to hae only a slight eect on this distributuion.
ligures 10 ,Page 29,, 28 and 29 show insight into the elocity ectors at arious planes
in the computational domain. No noticible dierence between these ectors or each rotation
rate can be seen. 1his again shows that the rotation rate o the blade has little eect on the
solution.
ligures 11 ,Page 30,, 30 and 31 depict a elocity contour along the meridional o the
computational domain. 1he solutions are again ery similar, howeer the contours show some
noticible dierences in the solution. 1he high elocity region at the trailing edge o the blade is
larger at the slower rotation rates and decreases in size as rotation rate increases.1he low
elocity region downstream o the turbine is also larger or the slower rotation rates and
decreases as rotation rate increases.
53
linally ligures 12 ,Page 31,, 32 and 33 compare the calculated wall shear stress by the
luid. Dierence between solutions can been seen in these igures.At the slower rotation rate,
the wall shear stress is greater closer to the leading edge and middle section o the blade than
the other two greater rotation rates. 1he trend appears to be that as rotation rate increases,
shear stress becomes more concentrated in the trailing endge section. 1he max shear stress
area also seems to be larger in the astest rotation rate than in the slower rotation rates.
54
ligure 26: 1otal Pressure Contour at the Surace o the Blade - Rotation Rate 250 RPM
I
l
o
w
D
i
r
e
c
t
i
o
n
I
l
o
w
D
i
r
e
c
t
i
o
n
55
ligure 2: 1otal Pressure Contour at the Surace o the Blade - Rotation Rate 500 RPM
I
l
o
w
D
i
r
e
c
t
i
o
n
I
l
o
w
D
i
r
e
c
t
i
o
n
56
ligure 28: Velocity Vectors in the Stationary lrame - Rotation Rate 250 RPM
5
ligure 29: Velocity Vectors in the Stationary lrame - Rotation Rate 500 RPM
58
ligure 30: Velocity Contour along the Meridional o the Computational Domain - Rotation Rate 250 RPM
59
ligure 31: Velocity Contour along the Meridional o the Computational Domain - Rotation Rate 500 RPM
60
ligure 32: Contours o the \all Shear Stress on the Surace o the Blade - Rotation Rate 250 RPM
I
l
o
w
D
i
r
e
c
t
i
o
n
I
l
o
w
D
i
r
e
c
t
i
o
n
61
ligure 33: Contours o the \all Shear Stress on the Surace o the Blade - Rotation Rate 500 RPM
I
l
o
w
D
i
r
e
c
t
i
o
n
I
l
o
w
D
i
r
e
c
t
i
o
n
62
UNIlORM VLRSUS NON-UNIlORM PI1Cl
1his thesis has stressed the importance o non-uniorm pitch in these Archimedean
screw designs. 1he ollowing results are a comparison with a uniormly pitched screw and
show why this non-uniorm pitch is an important aspect to the design. 1he results shown are
or a low rate o 0.1 m
3
,s and rotation rate o 50 RPM.
ligures 9 ,Page 28, and 34 depict the total pressure acting on the blade. 1he uniormly
pitched blade does not hae has much o a total pressure change between the leading and
trailing edges o the blade as seen in the non-uniormly pitched blade. Also the total pressure
extremes are much higher or the non-uniorm pitch than the uniorm pitch.
ligures 10 ,Page 29, and 35 compare the elocity ectors at arious planes in the
computational domain. lor the non-uniorm case, the elocity ectors indicate a high amount
o swirl downstream o the turbine, and a ast low near the trailing edge o the blade. In the
uniorm case, the swirl is signiicantly not as strong as the non-uniorm case. 1he elocities
themseles are not arying much either as is seen in the non-uniorm case. 1hese two
obserations are also eident in comparing the elocity contours o ligure 11 ,Page 30, and
ligure 36.
linally, the dierence between the wall shear stress between ligures 12 ,Page 31, and
3 is clearly eident. 1he wall shear stress in the uniorm case is pretty low throughout the
entire blade, while in the non-uniorm case, the wall shear stress greatly increases toward the
trailing edge o the blade.
63
ligure 34: 1otal Pressure Contours at the Surace o the Blade - Uniorm Pitch
I
l
o
w
D
i
r
e
c
t
i
o
n
I
l
o
w
D
i
r
e
c
t
i
o
n
64
ligure 35: Velocity Vectors in the Stationary lrame - Uniorm Pitch
65
ligure 36: Velocity Contour along the Meridional o the Computational Domain - Uniorm Pitch
66
ligure 3: Contours o the \all Shear Stress on the Surace o the Blade - Uniorm Pitch
I
l
o
w
D
i
r
e
c
t
i
o
n
I
l
o
w
D
i
r
e
c
t
i
o
n
6
MAPPING Ol PLRlORMANCL ClARAC1LRIS1ICS
In this inestigation, the trend in required head, total power, and eiciency are
calculated oer a range o olumetric low rates and rotation rates. 1he inestigation was
concerned with olumetric low rates ranging rom 0.05 m
3
,s to 0.5 m
3
,s and with rotation
rates ranging rom 200 RPM to 1500 RPM. 1he results were calculated rom the transient
simulation solutions. 1he total dynamic and static pressure was measured at a region just
beore and ater the leading and trailing edges o the blades, respectiely. 1he ollowing
equations were used to determine these perormance characteristics.
(JS)
(J6)
(J7)
68
ligure 38: Calculated lead as a lunction o llow Rate or arious Rotation Rates
69
ligure 39: Calculated Power as a lunction o llow Rate or arious Rotation Rates
0
ligure 40: Calculated Power ,closer look, as a lunction o llow Rate or arious Rotation Rates
1
ligure 41: Calculated Liciency as a lunction o llow Rate or arious Rotation Rates
2
Calculated head, power and eiciency are plotted as a unction o low rate in ligure
38 through 41. ligure 38 shows the trend o the calculated required head ersus the inlet
olumetric low rate oer a range o rotation rates. 1he trend shows that no matter the
rotation rate, the required calculated head or that low rate is approximately the same. It only
starts to ary more around the higher olumetric low rates ,approximately 0.4 m
3
,s,. ligure
39 and 40 display the trend in calculated power ersus olumetric low rate oer a range o
rotation rates. lere, it is seen that power increases exponentially as the calculated head does.
loweer, rotation rate has a drastic eect on the calculated power. At a constant low rate, as
the rotation rate increases, so does the calculated power. 1his results in a steeper trend as
rotation rate increases. ligure 41 depicts the trend o the calculated eiciency ersus low rate
oer arious rotation rates. 1he trend peaks around 2 eiciency or each rotation rate
inestigated, meaning that the rotation rate does not aect the peak eiciency. loweer,
rotation rate does aect the olumetric rotation rate at which the peak eiciency occurs. A
higher rotation rates moes the peak eiciency to a higher low rate and ice ersa.
3
C b a p t e r :
CONCLUSIONS
1his inestigation has shown that a person-portable micro-hydro power generation
system is a numerically possible solution or remote power generation. 1his system will hae
military applications such as disaster relie scenarios as well as commercial applications such as
power generation or remote locations.
Computational luid dynamics packages such as the ANS\S line o products are an
excellent numerical tool or this problem. A quality mesh with adequate solid-luid interace
resolution is ital or a good, physical numerical result. A transient analysis, using the
renormalized-group analysis transport equations or turbulent low and ormulating the
elocity scheme relatie to a stationary runner, is ideal or the design analysis o the
perormance characteristics o this runner geometry.
Spectral and temporal conergence is a ital check to the alidity o the numerical
solution. It was shown that the medium sized mesh that was inestigated is a good
compromise between numerical accuracy and computational resources. 1he study also showed
that the mesh and time-step selection o 100 time-steps per cycle is adequate enough to
capture the important turbulent length scales or the determination o perormance
characteristics o the runner geometry.
Methods to attempt to capture the transient nature o the rotating impeller such as
using a rotating mesh or rotating rame o reerence correlate well between solutions. 1heir
4
dierences in realizing the low ield are small. 1he rotating rame o reerence appears to
predict higher perormance alues than that o the rotating mesh, which is thought to be due
to smoothing the transient nature o the low with the rotating rame o reerence.
1he calculated head required to operate the turbine increases exponentially and is not
really aected by rotation speed. 1he power generated is inluenced more by the rotation
speed than the required head, but still shows an exponential increase as low rate increases.
1he calculated eiciency peaks around 2 eiciency no matter the chosen rotation rate,
howeer, the rotation rate does determine which low rate this peak eiciency occurs.
5
BIBLIOGRAPl\
|1[ K. l. lasol, "A Short listory o lydropower Control," Covtrot ,.tev. Magaive,
pp. 68-6, August 2002.
|2[ U. S. Department o the Interior, "1he lystory o lydropower Deelopment in the
United States," Bureau o Reclamation, 1 August 2009. |Online[. Aailable:
http:,,www.usbr.go,power,edu,history.html. |Accessed August 2012[.
|3[ G. Ingram, Basic Concepts in 1urbomachinery, Ventus Publishing ApS, 2009.
|4[ K. L. McCarthy, "Pros and Cons o lydropower," Connecticut Oice o Legislatie
Research, 4 October 2010. |Online[. Aailable: http:,,cga.ct.go,2010,rpt,2010-R-
0401.htm. |Accessed August 2012[.
|5[ U.S. Department othe Interior, "Lowell Notes," perievce Yovr .verica, pp. 1-2, 30
October 2008.
|6[ 1he American Society o Mechanical Lngineers, "Kaplan 1urbine," 1he American Society
o Mechanical Lngineers, \ork laen, 1980.
|[ J. D. Anderson, J. Degroote, D. Gerard, D. Lrik, R. Grundmann and J. Vierendeels,
Computational lluid Dynamics: An Introduction, 3rd ed., J. l. \endt, Ld., Lagle
Rier, \I: Springer, 2009.
|8[ l. lrunzulica, I. C. Andrei, L. Sikolya and L. Korody, "Special Aspects in 1riangulation
and Mapped Meshing," lascicle Mechanics, 1ribology, Machine Manuacturing
1echnology, Baia Mare, 2005.
|9[ J. P. Steinbrenner and J. R. Chawner, "Gridgen's Implementation o Partial Dierential
Lquation Based Structured Grid Generation Methods," in Proceeaivg. of tbe tb
ivtervatiovat Me.bivg Rovvatabte, South Lake 1ahoe, 1999.
|10[ ANS\S, Inc., "1heory Guide," 2009.
|11[ V. \akhot and S. A. Orszag, "Renormalization-Group Analysis o 1urbulence," .pptiea
ava Covpvtatiovat Matbevatic., ol. 5, no. 14, pp. 122-124, 6 October 1986.
|12[ V. \akhot, S. A. Orszag, S. 1hangam, 1. B. Gatski and C. G. Speziale, "Deelopment o
turbulence models or shear lows by a double expansion technique," .vericav v.titvte
of Pb,.ic., ol. 4, no. , pp. 1510-1520, July 1992.
|13[ ANS\S, Inc., "ANS\S 12.0 User's Guide," 2009.
|14[ G. Iaccarino, "Predictions o a 1urbulent Separated low usig Commercial ClD Codes,"
[ovrvat of tvia. vgiveerivg, ol. 123, no. 4, pp. 819-828, 2001.
|15[ J. Cadaalch, C. D. Perez-Segarra, R. Consul and A. Olia, "Veriication o linite Volume
Computations on Steady State lluid llow and leat 1ranser," [ovrvat of tvia.
vgiveerivg, ol. 124, no. 1, pp. 11-21, 2002.
|16[ Z. Liu and D. L. lill, "Issues surrounding Multiple lrames o Reerence Models or
1urbo Compressor Applications," in vtervatiovat Covpre..or evgiveerivg Covferevce, \est
Laayette, 2000.
|1[ l. Nilsson and L. Daidson, "Validations o inite olume ClD against detailed elocity
6
and pressure measurements in water turbine runner low," vtervatiovat [ovrvat for
^vvericat Metboa. iv tvia., ol. 41, no. 8, p. 863-89, 200.
|18[ P. M. Arenante, C. Luo, C.-C. Chou, I. lort and J. Medek, "Velocity proiles in a closed,
essel: comparison betwen experimental LDV data and numerical ClD predictions,"
Cbevicat vgiveerivg cievce, ol. 52, no. 20, pp. 3483-3492, 199.
|19[ K. L. Morud and B. l. ljertager, "LDA LASURLMLN1S AND ClD MODLLLING
Ol GAS-LIQUID lLO\ IN A S1IRRLD VLSSLL".
|20[ J. Riglin, "Caitation Study or a Microhydro 1urbine," Lehigh Uniersity, Bethlehem,
2012.
VI1A
\. Chris Schleicher graduated high school rom lempield Area Senior ligh School
in lempield 1ownship, PA in 200. le moed on to receie his Bachelor o Science Degree
in Mechanical Lngineering at \ork College o Pennsylania in \ork, PA in 2011. le also had a
co-operational opportunity with Voith lydro in \ork, PA where he learned about ClD and
the hydro turbine industry. le is currently studying at Lehigh Uniersity.
You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Guide On How To Develop A Small Hydropower Plant (ESHA 2004)Document296 pagesGuide On How To Develop A Small Hydropower Plant (ESHA 2004)Mile Gorgievski0% (1)
- Hydraulic Design of DesiltersDocument7 pagesHydraulic Design of DesiltersRajpNo ratings yet
- Rubber DamDocument36 pagesRubber DamZeeth Kv80% (5)
- Tyrolean Weir PDFDocument148 pagesTyrolean Weir PDFRex ImperialNo ratings yet
- Thermodynamics ProblemsDocument13 pagesThermodynamics ProblemsKo Qurban Ahmedli :/No ratings yet
- Plaquette-Costronic en 2020Document2 pagesPlaquette-Costronic en 2020Jun OrtizNo ratings yet
- Dams and ReservoirsDocument8 pagesDams and ReservoirsAbdullah AL QahtaniNo ratings yet
- Earthscienceforstem q1 Mod8 Energyresources v2Document34 pagesEarthscienceforstem q1 Mod8 Energyresources v2RUTH MIASCONo ratings yet
- 4188-Article Text-14581-1-10-20110123Document9 pages4188-Article Text-14581-1-10-20110123pujan gurungNo ratings yet
- Assignment # 1: Psa (Power System Analysis) Name: Arslan AslamDocument11 pagesAssignment # 1: Psa (Power System Analysis) Name: Arslan Aslama03084955020No ratings yet
- Profile PT MPMDocument18 pagesProfile PT MPMShalahuddin HasanNo ratings yet
- Power Plant Engineering PDFDocument31 pagesPower Plant Engineering PDFKazi Rafakat HossainNo ratings yet
- Power Operation and Control: Chapter-1Document32 pagesPower Operation and Control: Chapter-1kplrpnNo ratings yet
- HydroLink2016 01 Hydraulic LabsDocument32 pagesHydroLink2016 01 Hydraulic LabsBenv AntonioNo ratings yet
- Renewable and Non Renewable ResourcesDocument40 pagesRenewable and Non Renewable ResourcesChristian John Musngi0% (1)
- RMK 11 - Strategy Paper 17Document40 pagesRMK 11 - Strategy Paper 17Cheehoong YapNo ratings yet
- Analysis of Quality Infrastructure Services Offered in Ethiopia and Potential For DevelopmentDocument19 pagesAnalysis of Quality Infrastructure Services Offered in Ethiopia and Potential For DevelopmentAdonias DechasaNo ratings yet
- Energy Crisis AssignmentDocument10 pagesEnergy Crisis AssignmentKamranNo ratings yet
- Guideline and Manual For Hydropower Development Vol. 1 Conventional Hydropower and Pumped Storage HydropowerDocument138 pagesGuideline and Manual For Hydropower Development Vol. 1 Conventional Hydropower and Pumped Storage Hydropowerbedilu77No ratings yet
- Water EnergyDocument13 pagesWater Energyابراهيم عليNo ratings yet
- New ERA For Electricity in Europe 2003Document29 pagesNew ERA For Electricity in Europe 2003Joan AymerichNo ratings yet
- Key Environmental Issues of A Hydroelectric Power PlantDocument5 pagesKey Environmental Issues of A Hydroelectric Power PlantMariyam Shadra N ANo ratings yet
- Mutriku OWC Plant PDFDocument11 pagesMutriku OWC Plant PDFLeoPérezNo ratings yet
- ETHIOPIA: A Land of Diversity, History, and CultureDocument18 pagesETHIOPIA: A Land of Diversity, History, and CultureSamson DawitNo ratings yet
- Closed Cycle Operation:: 1. A) Sketch Proper T-S Diagram For A Two Stage Gas Turbine Power Plant With Inter CoolerDocument5 pagesClosed Cycle Operation:: 1. A) Sketch Proper T-S Diagram For A Two Stage Gas Turbine Power Plant With Inter CoolerFazil KhanNo ratings yet
- Chapter 2 RRLDocument7 pagesChapter 2 RRLJangkz GamingNo ratings yet
- TidongDocument162 pagesTidongSandeep AggarwalNo ratings yet
- Module-2 Energy Systems & AnalysisDocument46 pagesModule-2 Energy Systems & Analysisrushi C SNo ratings yet
- Jindal Aluminium Ltd. Wind PowerDocument29 pagesJindal Aluminium Ltd. Wind PowerSanil KollaraNo ratings yet
- International: Dry CargoDocument152 pagesInternational: Dry CargoPJGNo ratings yet