You might also like
- Report On Prognosis of Faulty GearDocument20 pagesReport On Prognosis of Faulty GearShashi Bhushan GunjanNo ratings yet
- Timebase Plots ExplainedDocument18 pagesTimebase Plots ExplainedManuel L LombarderoNo ratings yet
- REDUCTION of The SKI SLOPE EFFECTDocument8 pagesREDUCTION of The SKI SLOPE EFFECTEnzo MarquesNo ratings yet
- Edoc-Vibration Study and AnalysisDocument9 pagesEdoc-Vibration Study and AnalysisEl Comedor BenedictNo ratings yet
- Case Histories in Vibration Analysis and Metal Fatigue for the Practicing EngineerFrom EverandCase Histories in Vibration Analysis and Metal Fatigue for the Practicing EngineerRating: 4.5 out of 5 stars4.5/5 (3)
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Vibration and Monitoring Terms GlossaryDocument12 pagesVibration and Monitoring Terms Glossaryyaniprasetyo12No ratings yet
- Choosing The Right Accelerometer White Paper PDFDocument6 pagesChoosing The Right Accelerometer White Paper PDFRahulNo ratings yet
- Basics Vibration MeasurementDocument5 pagesBasics Vibration MeasurementMohan Arumugavallal100% (1)
- Installation of Vibration Sensors: A GuideDocument8 pagesInstallation of Vibration Sensors: A GuidenmguravNo ratings yet
- Low Freq. Meas & gSEDocument13 pagesLow Freq. Meas & gSEsatya_chagantiNo ratings yet
- Time Waveform Analysis TechniquesDocument2 pagesTime Waveform Analysis TechniquesManel Montesinos100% (1)
- Rolling Element Bearing Fault Detection With A Single Point Defect On PDFDocument8 pagesRolling Element Bearing Fault Detection With A Single Point Defect On PDFsunil481No ratings yet
- Accelerometer Selection Based On ApplicationsDocument8 pagesAccelerometer Selection Based On Applicationspatilrushal824No ratings yet
- Order Analysis ToolkitDocument16 pagesOrder Analysis ToolkitManuel Enrique Salas FernándezNo ratings yet
- Vibration SeverityDocument11 pagesVibration SeverityDr. R. SharmaNo ratings yet
- Guide to Analyzing Variable Frequency Drive Centrifugal PumpsDocument26 pagesGuide to Analyzing Variable Frequency Drive Centrifugal PumpsKamal ArreazaNo ratings yet
- Effective Use of Statistical Models To Establish and Update Vibration AlarmDocument11 pagesEffective Use of Statistical Models To Establish and Update Vibration AlarmMohammadreza GalebanNo ratings yet
- Dynamic Vibration AbsorberDocument67 pagesDynamic Vibration AbsorberNajeeb ShakirNo ratings yet
- Introduction To Impulse HammersDocument3 pagesIntroduction To Impulse HammersxxNo ratings yet
- Learning On VibrationDocument42 pagesLearning On VibrationAnkit Shakyawar100% (1)
- Electric Motor Diagnostics Defect Frequencies and Data ColleDocument51 pagesElectric Motor Diagnostics Defect Frequencies and Data ColleSubrata Dubey50% (2)
- Detect Machinery Faults by Using Peak VueDocument13 pagesDetect Machinery Faults by Using Peak VueHarold Alconz100% (2)
- Dynamic Absorber DesignDocument14 pagesDynamic Absorber DesignLarry Deem0% (1)
- Subsynchronous Resonance Analysis IEEE First Benchmark ModelDocument4 pagesSubsynchronous Resonance Analysis IEEE First Benchmark ModelBhavik PrajapatiNo ratings yet
- SPM Bearing Checker InstructionDocument42 pagesSPM Bearing Checker Instructionmilos dzinoNo ratings yet
- Introduction To Vibration: R.Narasimha Swamy Senior ConsultantDocument43 pagesIntroduction To Vibration: R.Narasimha Swamy Senior Consultanthemanth45No ratings yet
- Orbit and Timebase Plot AnalysisDocument16 pagesOrbit and Timebase Plot AnalysisAnonymous w6TIxI0G8l100% (1)
- Vibrasyon Electrical ProblemsDocument4 pagesVibrasyon Electrical ProblemsbbulutmmNo ratings yet
- A I RS: David G. Dorrell, William ThomsonDocument11 pagesA I RS: David G. Dorrell, William ThomsonEng Bagaragaza RomualdNo ratings yet
- R&T 2008 - Principles and Practices of Vibrational Analysis - KeeferDocument64 pagesR&T 2008 - Principles and Practices of Vibrational Analysis - KeeferArnab De100% (1)
- Troubleshooting Turbomachinery Using Startup and Coastdown Vibration DataDocument14 pagesTroubleshooting Turbomachinery Using Startup and Coastdown Vibration DataAhtsham AhmadNo ratings yet
- CM3152 en SKF Idler Sound MonitorDocument4 pagesCM3152 en SKF Idler Sound MonitorLuisSilvaNo ratings yet
- AMPLITUDE MODULATION Versus BEATSDocument5 pagesAMPLITUDE MODULATION Versus BEATSHaitham YoussefNo ratings yet
- Vibration Analysis of Gear Box.5-MilosprokoDocument3 pagesVibration Analysis of Gear Box.5-MilosprokoRavikiran Hegde100% (2)
- TN 13 Omnitrend ShortcutsDocument2 pagesTN 13 Omnitrend ShortcutsBrtonNo ratings yet
- Phase Analysis: How to Use Phase Readings to Diagnose FaultsDocument27 pagesPhase Analysis: How to Use Phase Readings to Diagnose FaultsShawn RuhlNo ratings yet
- Introduction To PeakvueDocument55 pagesIntroduction To PeakvuesebastianNo ratings yet
- VibMatters September 2016 Final DownloadDocument7 pagesVibMatters September 2016 Final DownloadfazzlieNo ratings yet
- FFT Windowing TutorialDocument10 pagesFFT Windowing TutorialPradeep LoboNo ratings yet
- Using PeakVue Plus Technology For Detecting Anti Friction Bearing FaultsDocument11 pagesUsing PeakVue Plus Technology For Detecting Anti Friction Bearing Faultseko bagus sunaryo100% (1)
- WPL 26 Shock MonitoringDocument16 pagesWPL 26 Shock MonitoringAhmed El-ShafeiNo ratings yet
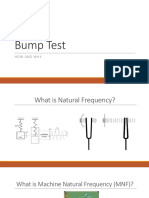
- Bump TestDocument123 pagesBump Testtylerdurdane100% (1)
- Alarm Types – Narrow Bands and Overall AlarmDocument6 pagesAlarm Types – Narrow Bands and Overall AlarmChetan PrajapatiNo ratings yet
- Spike Energy (Deteccion Temprana para Muy Altas Frecuencias) PDFDocument22 pagesSpike Energy (Deteccion Temprana para Muy Altas Frecuencias) PDFMarcos Manzano100% (1)
- Rev.0 CSI 2600 PDFDocument170 pagesRev.0 CSI 2600 PDFAnonymous srwHCpANo ratings yet
- An Introduction To Time Waveform AnalysisDocument17 pagesAn Introduction To Time Waveform AnalysisBassemNo ratings yet
- Compressor Rub Verified by Rotating Phase Symtoms PDFDocument6 pagesCompressor Rub Verified by Rotating Phase Symtoms PDFLong NguyenNo ratings yet
- Bumptest 180410120817Document13 pagesBumptest 180410120817Daniel SolaresNo ratings yet
- Low Frequency Vibration Analysis: Selecting Sensors and Coupling MethodsDocument5 pagesLow Frequency Vibration Analysis: Selecting Sensors and Coupling MethodsLasse HansenNo ratings yet
- 19680013987Document496 pages19680013987viorelcroitoruNo ratings yet
- 7 - Gear DeffectDocument21 pages7 - Gear Deffectmohamed ghoneemNo ratings yet
- Full SpectraDocument19 pagesFull SpectraBharath Chandra ReddyNo ratings yet
- Successful Solution: To The Challenge ofDocument2 pagesSuccessful Solution: To The Challenge ofKenny RuizNo ratings yet
- Signal Processing and DiagnosticsDocument191 pagesSignal Processing and DiagnosticsChu Duc HieuNo ratings yet
- Vibration TechnologyDocument18 pagesVibration TechnologySakthimgsNo ratings yet
- Structural Health MonitoringFrom EverandStructural Health MonitoringDaniel BalageasNo ratings yet
- Why Industrial Bearings Fail: Analysis, Maintenance, and PreventionFrom EverandWhy Industrial Bearings Fail: Analysis, Maintenance, and PreventionNo ratings yet
- Noise Calculation Method For Deep Groove Ball BearDocument15 pagesNoise Calculation Method For Deep Groove Ball BearLe Thanh HaiNo ratings yet
- Monitoring The Lubricant Condition in A Low-SpeedDocument38 pagesMonitoring The Lubricant Condition in A Low-SpeedLe Thanh HaiNo ratings yet
- Nathenson David Isaac PDFDocument375 pagesNathenson David Isaac PDFsudharsans88No ratings yet
- (Journal of Middle European Construction and Design of Cars) Subsynchronous Frequency of A Turbocharger RotorDocument4 pages(Journal of Middle European Construction and Design of Cars) Subsynchronous Frequency of A Turbocharger RotorLe Thanh HaiNo ratings yet
- TB KeyPerformanceEvaluation PDFDocument2 pagesTB KeyPerformanceEvaluation PDFtomjones77No ratings yet
- T23243 272Document30 pagesT23243 272maxeytm_839061685100% (1)
- Matlab Built Routine For Turbocharger Vibration Survey Post Processing PDFDocument7 pagesMatlab Built Routine For Turbocharger Vibration Survey Post Processing PDFTran HienNo ratings yet
- 2 Design Radial Inflow Turbine Using RitalDocument18 pages2 Design Radial Inflow Turbine Using Ritaljared_tan_5100% (1)
- Journal Bearing Design-Lubrication-Operation For Enhanced Performance PDFDocument264 pagesJournal Bearing Design-Lubrication-Operation For Enhanced Performance PDFAnonymous gr5Pr9AVNo ratings yet
- Causes of Subsynchronous Vibration in Integrally Geared CompressorsDocument12 pagesCauses of Subsynchronous Vibration in Integrally Geared CompressorsLe Thanh Hai100% (1)
- (Journal of Middle European Construction and Design of Cars) Subsynchronous Frequency of A Turbocharger RotorDocument4 pages(Journal of Middle European Construction and Design of Cars) Subsynchronous Frequency of A Turbocharger RotorLe Thanh HaiNo ratings yet
- PeakvueDocument68 pagesPeakvueLe Thanh Hai100% (1)
- Subcrible MeDocument1 pageSubcrible MeLe Thanh HaiNo ratings yet
- The Planned Installation SoftwaresDocument1 pageThe Planned Installation SoftwaresLe Thanh HaiNo ratings yet
- Dynamic Balancing-Randall FoxDocument33 pagesDynamic Balancing-Randall FoxRicardo Zevallos CruzNo ratings yet
- Some Chronology and Vib Table For FD Fan 3ADocument6 pagesSome Chronology and Vib Table For FD Fan 3ALe Thanh HaiNo ratings yet
- RotorInstab Some Cases of Specific Behaviour of Rotors - Instability of OperationDocument27 pagesRotorInstab Some Cases of Specific Behaviour of Rotors - Instability of OperationLe Thanh Hai100% (1)
- RP SpectrumsDocument2 pagesRP SpectrumsLe Thanh HaiNo ratings yet
- 2.vibration Case Study 2Document5 pages2.vibration Case Study 2Le Thanh HaiNo ratings yet
- Vftpresentation 130801102551 Phpapp01Document21 pagesVftpresentation 130801102551 Phpapp01Le Thanh HaiNo ratings yet
- 12 Balancing With The Presence of A RubDocument9 pages12 Balancing With The Presence of A RubLe Thanh HaiNo ratings yet
- Stress ConcentrationDocument6 pagesStress ConcentrationLe Thanh HaiNo ratings yet
- Lec6 Power Calculation2Document13 pagesLec6 Power Calculation2Le Thanh HaiNo ratings yet
- Shaft AlignmentDocument96 pagesShaft AlignmentLe Thanh HaiNo ratings yet
- Reactor Pump CrackDocument8 pagesReactor Pump CrackLe Thanh HaiNo ratings yet
- Improve English Speaking Skills Through Practice and ImmersionDocument4 pagesImprove English Speaking Skills Through Practice and ImmersionLe Thanh HaiNo ratings yet
- Steam TurbineDocument8 pagesSteam TurbineWalid FattahNo ratings yet
- Trying To Improve Food Safety With A CameraDocument5 pagesTrying To Improve Food Safety With A CameraLe Thanh HaiNo ratings yet