IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 03 Issue: 07 | Jul-2014, Available @ http://www.ijret.org 512
A NOVEL APPROACH TO RECORD SOUND
Aaswad Anil Satpute
1
, Sheetal Mangesh Pandrekar
2
, Imdad A. Rizvi
3
1
Junior Research Scientist, Computer Science, Hansa Embedded Systems Academy, Maharashtra, India
2
Junior Research Scientist, Computer Science, Hansa Embedded Systems Academy, Maharashtra, India
3
Associate Professor, Department of Electronics and Telecommunications Engineering, Terna Engineering College,
University of Mumbai, Maharashtra, India
Abstract
Analog sound recording is done with the help of a microphone when the diaphragm vibrates due to the changes in atmospheric
pressure which are recorded as a graphic representation of the sound waves on a medium such as magnetic tape. Digital
recording converts the analog sound signal picked up by the microphone to a digital form by a process of digitization. Both
Analog and Digital Sound recording techniques have their pros and cons. However, the common disadvantage that both these
techniques suffer from is the loss in the clarity of the signal due to distortion and attenuation of signal during propagation from
the source of sound to the diaphragm of the microphone. This paper presents a novel approach that will get rid of the problems
like signal attenuation and distortion while recording audio signals The approach is based on mapping the vibrations of the
source with a High Speed camera by using Computer Vision techniques like Object Tracking. We prove that the approach is
noise-resistant and can record a signal by maintaining a high quality, which is much better than the quality of the signal recorded
by a microphone. Moreover, the approach can take sound recording and reproduction to a new level by making it possible to
select a source when there are multiple sources producing audio signals simultaneously. A technology based on the proposed
approach will particularly benefit researchers interested in recording the minute details of the audio signal of any frequency,
without being restrained by the limitations of the recording system or the distance of the source of sound.
Keywords: Acoustic Waves, Audio Recording, Computer Vision, Signal Reconstruction, Vibration Measurement
--------------------------------------------------------------------***----------------------------------------------------------------------
1. INTRODUCTION
High Speed Imaging systems are used to measure vibrations,
as described in [1, 2]. Displacements, as small as 0.18 mm,
have been measured in [3] by using a high speed imaging
system. In recent years, the technology of cameras has not
only delivered an increase in the frame rate but also
substantial improvements in the image quality, sensitivity,
and lens performance. As established by Moores Law,
described in [4], the technology will continue to improve at
an exponential rate. In 2011, researchers at MIT Labs
brought about a major breakthrough in the field of high
speed imaging. They invented a phenomenal camera which
is capable of capturing a trillion frames per second. They
named this phenomenon as Femtophotography, described in
[5]. Motivated by this breakthrough and ability of high
speed imaging to accurately map vibrations of an object, this
paper attempts to explore the capabilities of high speed
imaging in a novel technique for recording audio signals.
A vibrating object is a source of sound. It sets the molecules
of the medium into vibrations and travels through the
medium as a pressure wave. During its propagation, it is
attenuated by the medium and distorted by other sound
signals in the surroundings. Thus, with a microphone, it is
difficult to record a clear and accurate sound wave. This
paper introduces an approach that does not rely on the
propagation of the signal from its source to the recording
system. The approach aims at mapping how the source
vibrates and synthesizing sound from its vibrations. The
approach requires the use of a high speed camera to view the
vibrations of the source.
In order to develop and test this approach for various cases,
the simulations of tuning fork vibrating at different
frequencies were generated. Simulations were generated for
tuning fork vibrating at frequencies 98 Hz, 123.47 Hz,
174.61 Hz, 220 Hz, 349.23 Hz recorded with camera of
1000, 1750, 3350, 4250, 5000 fps respectively. These frame
rates were chosen to ensure that the frame rate is not a direct
multiple of the frequency of the vibrating tuning fork. In this
paper, the readings and analysis of the 98 Hz tuning fork has
been presented. The sound file generated after mapping the
vibrations is compared with a 98 Hz sound sampled at 44.1
kHz (called reference file in this paper), the standard
sampling rate of digital audio. The reference file depicts the
sound that would be recorded by a microphone with
sampling frequency 44.1 kHz. This reference file has been
generated using Audacity software [6] instead of being
recorded with a microphone. The reason for this is that to
record an absolutely accurate audio signal with a
microphone would require a completely noise free setup. In
order to make useful consensus about the result, the sound
file generated by mapping the vibrations is compared with
the reference file. The reference file depicts the most
accurate sound that can be recorded by a microphone with a
sampling rate of 44.1 kHz in a completely noise free setup.
For periodic waveforms, including non-sinusoidal
waveforms, the Fourier theorem, described in [7], states that
A periodic function which is reasonably continuous may be
IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 03 Issue: 07 | Jul-2014, Available @ http://www.ijret.org 513
expressed as the sum of a series of sine or cosine terms
(called the Fourier series). Thus, any periodic vibrations
can be described in terms of sinusoidal waves and the sound
may be synthesized. The approach may be extended to
complex waveforms by using the Fourier Theorem if the
results with simple waveforms are found to be beneficial.
Section 2 describes the experiment that was conducted by
considering a case of a tuning fork vibrating at 98 Hz. A
1000 fps (frames per second) video clip of the tuning fork
was processed, one frame at a time, to map the vibrations of
the tuning fork. This mapped vibration was then used to
write an audio file. Techniques that may be applied to
improve the accuracy while recording the signal are
described in section 2. The potential advantages of
employing high speed imaging system for recording audio
signal are discussed in section 5. Section 7 describes the
ways in which the enormous potential of Femtophotography
[5], can be employed to the proposed approach.
2. THE EXPERIMENT
A source of sound generally vibrates rapidly with small
amplitude. In order to measure the amplitude of vibrations
accurately, the camera has to be positioned such that the axis
of the lens is perpendicular to the plane of vibration of the
tuning fork.
For presenting the approach, a vibrating tuning fork of 98
Hz has been considered as the source of sound. The
experiment is performed on a video clip of the vibrating
tuning fork. The duration of the video is 1s and it comprises
of 1000 frames. Thus, the video clip represents video
recorded by a 1000 fps camera. The code for reading the
frames of the video to map the vibrations and generating an
audio file is written in .NET using OpenCV Libraries.
2.1 Preprocess on the Video
The video needs to be pre-processed in order to get rid of
the irrelevant aspects. This is an important procedure as it
will improve the efficiency of the remaining process. The
video is preprocessed with the steps described in this
section.
2.1.1 Conversion to Greyscale
As the process does not require color images, each frame in
the video is converted to a gray scale image.
2.1.2 Conversion to Binary Image
The images are converted to binary image by using a
suitable threshold. The suitable threshold is determined by
using the Otsu Method which has been described in [8].
After obtaining the threshold t, the images are converted to
binary by using,
1 , y x F , when t y x F , , else, 0 , y x F .
2.1.3 Edge Detection
The edges of the object in the scene are determined in each
frame of the video. The Canny Edge Detection Algorithm,
described in [9] is used with the Scharr Edge Detection
operator. This operator gives more enhanced edges than
other gradient operators. The matrices for obtaining the
horizontal and vertical gradient using Scharr Operator are
given in [10].
This pre-processing step helps to obtain the points of interest
for efficiently mapping the vibrations.
2.2 Reporting the Displacements into the File
The displacement of a point on the tuning fork is measured
at in each frame of the camera. This displacement is
measured in pixels. The instances at which this displacement
is recorded are referred to as the timestamps. The time
interval between consecutive timestamps must be as small
as possible for greater accuracy in the measured amplitude.
2.3 Reporting the Displacements into the File
To ensure that the precision of the computing hardware does
not affect the value of displacement, the readings have to be
normalized. The normalization is performed in two steps:
Subtracting the value of minimum displacement
from all the readings
Dividing each reading by maximum displacement
A part of the file containing the normalized readings of a
source vibrating at 98 Hz is shown in Table 1. It shows the
readings obtained for one vibration. As the source
considered has a constant frequency, these reading are
repeated for all the vibrations throughout the file. The file
contains 1000 timestamps and the displacement at each
timestamp.
2.4 Determining Frequencies of the Vibrations
The records in the file are read sequentially to determine the
local maxima and the local minima of displacement. The
value of displacement before which the displacements are in
increasing order and after which the displacements begin to
decrease, marks a change from increase to decrease in
displacement. This value of displacement is the local
maxima. Similarly, the value of displacement before which
the displacements are in decreasing order and after which the
displacements begin to increase, marks a change from
decrease to increase in displacement. This value of
displacement is the local minima.
From Table 1, we have local maximum at timestamp 9 (t
9
)
and local minima at t
14
. As these readings are repeated, the
next local maximum is obtained at t
19
. The difference
between local maximum and its following local minimum
gives the amplitude of vibration. The time required by the
source to cover a distance equal to its amplitude of vibration
is equal to half times the time period of vibration. Thus, the
difference between the timestamps of local maxima and local
minima of displacement is equal to half times the time period
IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 03 Issue: 07 | Jul-2014, Available @ http://www.ijret.org 514
of vibration. If the vibrations of the source are not constant,
then time period between every local maxima and local
minima needs to be calculated.
Let t
max
and t
min
denote the timestamp at which local
maximum occurs and the consecutive local minimum occurs,
respectively. Let T denote the time period of the waveform.
Thus,
2
min max
T
t t
(1)
Thus the frequency (f) of the vibration can be obtained as,
min max
2
1
t t
f
(2)
Finally, the frequency of the sound wave (f
s
) is obtained as,
fps f f
s
(3)
2.5 Preprocess for the Video
The normalized readings with frequencies at each timestamp
are used to generate a suitable audio file. Due to support for
high sampling rate, wave file format has been used. The
final audio file is generated using wave file format at 1 MHz
sampling rate.
3. TECHNIQUES TO IMPROVE ACCURACY
When the frequency of vibration is very high and a suitable
camera is not available, there are certain procedures that
may be applied to improve the waveform being recorded.
3.1 Interpolation
Interpolation techniques, from [11], can be applied to
determine the intermediate displacements of the vibrating
source.
3.2 Sub-Pixel Accuracy
If the vibrations are very small and the amplitude accounts
for only a few pixels then it may be needed to determine the
displacements at a sub-pixel level, as in [12]. With Sub-
Pixel using Phase-Only Correlation (POC), it is possible to
compute with up to
th
100 1
pixel accuracy, as shown in [13].
4. EMPERICAL RESULTS
The wave file generated by experiment was compared with a
reference file of 98 Hz audio signal. The comparison is done
on GoldWave audio editing software, [14]. The comparison
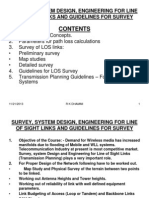
as obtained on GoldWave is shown in the Fig. 2 (a) and (b).
Both the files are viewed at the same scale (2 units = 0.0002
on Time axis, and 2 units = 0.01 on Amplitude axis). It is
observed that the reference file shows discontinuities
whereas the one obtained by the experiment does not show
any discontinuities at this scale. Fig. 2 (c) is the screenshot
of the file obtained by the experiment, viewed at a scale of 1
unit = 0.000005 on Time axis, and 2 units = 0.0002 on
Amplitude axis. The file begins to show noticeable
discontinuities only at such a high magnification.
The average result of the comparison of the five sound files,
one of each tuning fork, with Praat software, [15], is shown
in the Table 2. The comparison of various characteristics of
sound confirms that the experimentally generated
waveforms of the various frequencies are better than the
reference files, respectively.
The experiment was performed on a Windows 8 64-bit
platform with 2.30 GHz processor and 8 GB RAM. The
total time taken for preprocessing the 1000 frames, each 720
576 pixels, and reporting the displacements into a file, as
described in section 2.1 and 2.2, is approximately, 1020159
ms. The time taken to determine the frequencies at each
timestamp, as shown in section 2.4, is 0.0312137 ms. The
time taken to generate the audio file, as described in section
2.5, is 0.2656429 ms.
Table -1: Part of the Normalized File (of Frequency 98Hz)
with Frequencies determined
Timestamps Displacement Frequencies (Hz)
6 0.5 98
7 0.810526316 98
8 1 98
9 1 98
10 0.810526316 98
11 0.5 98
12 0.189473684 98
13 0 98
14 0 98
15 0.189473684 98
Table -2: Part of the Normalized File (of Frequency 98Hz)
with Frequencies determined
File
Char-
acteristic
Empirically
Generated
File
Reference
WaveFile
Reference
MP3 File
Standard
deviation of
pitch
14
10 9
Hz
6
10 4
Hz
4
10 4
Hz
Jitter (local)
14
10 5
%
10
10 3
%
3
10
%
Jitter (local,
absolute)
18
10 5
s
14
10 3
s
8
10 8 . 9
s
Jitter (rap)
14
10 3
%
10
10 2
%
4
10 6
%
Jitter (ppq5)
14
10 6
%
10
10 3
%
4
10 6
%
Jitter (ddp)
14
10 9
%
10
10 6
%
3
10 2
%
IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 03 Issue: 07 | Jul-2014, Available @ http://www.ijret.org 515
5. DISCUSSION
While recording an audio signal, background noise gets
added to the desired signal when it propagates from the
source to the recording system. This paper proposes an
approach that does not rely on the propagated signal for
recording the sound. Thus, it makes it possible to prevent
the noise from being recorded. Apart from this, a number of
potential strengths of the technique are highlighted in this
section.
5.1 Recording Sound of Any Frequency
By Nyquist theorem, described in [16], a microphone with a
sampling rate of 44.1 kHz can record a sound at most 22.05
kHz. The frequency response of the microphone is limited
by the physical characteristics of the components that make
up the microphone. Thus, there is a limit to the frequency of
ultrasound that can be recorded by the microphone. The
proposed approach may be able to record any frequency of
ultrasound depending on the frame rate of the camera. With
Femtophotography [5], it is possible to even record a photon
of light moving. This means that it is possible to capture a
vibrating object of 500 GHz. Thus, the approach can make it
possible to record any ultrasound.
5.2 Elimination of Noise
Presently, active noise control, as described in [17, 18], is a
method widely used for reducing unwanted sound in the
environment. For Active noise control, the system needs to
generate a secondary signal of nearly equal amplitude as the
noise signal to interfere destructively with the noise, thereby
cancelling the noise signal. In a complex field with many
sources of sound, a number of secondary signals will need to
be generated to cancel other signals in order to record only a
particular sound signal.
Fig -1: Comparison of the experimentally obtained wave file with a reference wave file of 98 Hz sound (a) Discontinuities of the
reference wave file are clearly visible. (b) The experimentally obtained wave file does not show any discontinuities when viewed
at the same scale as the reference file. (c) The experimentally obtained wave file begins to show noticeable discontinuities only
when magnified to a much higher level.
The proposed approach overcomes some limitations of
active noise control in the following ways:
There is no introduction of a secondary source.
Even in a complex field with many sources of
sound, only one camera would be needed to
eliminate unwanted signals. This can be done with
the help of object tracking. The desired source can
be selected and the remaining sources can be
discarded. Thus, even though there would be
interference of sound waves from the various
sources, only the sound from the selected source
will be recorded. Various Object Tracking
algorithms have been described and compared in
[19].
5.3 Selection of Desired Sound
By employing object tracking, we can track the desired
source of sound. Thus, the proposed approach allows us to
listen to a particular sound at a time when there are many
sources producing sound simultaneously.
5.4 A Consistent Approach
Microphones come in a range of sizes and prices, having
different directional properties. Each microphone is suited
for a specific purpose. Like a microphone is used to record
sound in air, a hydrophone, as described in [20], is used to
record sound under water and a geophone, as shown in [21],
is used to record vibrations under the ground. Every medium
has a property called acoustic impedance, as defined in [22],
which indicates how much sound pressure is generated by
the vibration of the molecule of the medium at a particular
frequency. Thus, different equipment has been designed for
specific medium in which the sound is to be recorded.
The proposed approach is independent of the acoustic
impedance of the medium. Thus, it will be possible to apply
IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 03 Issue: 07 | Jul-2014, Available @ http://www.ijret.org 516
the same approach in any medium without any major
changes in the operation.
5.5 No Attenuation of Waves and Capable of
Recording Very Small Amplitude
As the approach does not rely on the signal propagated from
the source to record the sound, the sound will be recorded
clearly irrespective of the attenuation of signal caused by the
medium.
The proposed approach employed with a high resolution
camera will be capable of recording extremely small
vibrations. Thus, the sound signal of very low amplitude
would be recorded in the presence of other high amplitude
sound signals.
5.6 Vibrating Source in Vacuum
As the approach does not depend on the propagation of
sound waves before recording the sound, it makes it possible
to record a sound intended to be produced when the source
is situated in vacuum.
5.7 Faster Recording of Sound
Velocity of sound differs from medium to medium. In
certain applications, the sound may be needed instantly.
Using the proposed approach; the delay in production of
sound will be introduced by the camera, speed of light in the
medium and computational cost in reproduction of sound.
With the use of high speed processors and optimized
computations, this delay can be made negligible as
compared to the delay introduced by the speed of sound in
most of the media. As the approach depends on the speed of
light coming from the source rather than the speed of sound,
it may be possible to record the sound instantaneously.
6. CONCLUSIONS
This paper proposes a novel approach for recording sound by
mapping vibrations of the source. The experimental result
confirms that the proposed algorithm applied on a 1000 fps,
1750 fps, 3350 fps, 4250 fps, and 5000 fps video clip of a
tuning fork vibrating at 98 Hz, 123.47 Hz, 174.61 Hz, 220
Hz and 349.23 Hz, respectively, generates a smooth and
accurate sound wave of the respective frequency. These
experimentally generated sound file have significantly lower
standard deviation and jitter as compared to a reference file
of a the sound. The proposed technique employing high
speed imaging can record the desired sound signal accurately
by mapping the vibrations of the source and prevent the noise
from being recorded. A number of potential advantages like
consistency, no attenuation and capability to record any
frequency of sound, etc. have been discussed.
FUTURE SCOPE
In this paper, tuning fork generating sinusoidal waves have
been considered. As the result has been confirmed, the
proposed technique needs to be tested for sound waves other
than pure sinusoidal waves by considering more general
vibrations. The technique needs to be developed to handle
real time videos to enable real time sound recording. With
the Ultra-fast imaging system, described in [23], developed
at MIT, images of objects that are out of the line of sight of
the camera can be captured. This system can be exploited for
recording vibrations of the source which are not in the field-
of-view of the camera.
REFERENCES
[1] D. Mas Candela, B. Ferrer Crespo, J. Espinosa
Toms, J. Prez Rodrguez, A.B. Roig Hernndez,
and C. Illueca Contri, High speed imaging and
algorithms for non-invasive vibrations
measurement, presented at The 4th International
Conference on Experimental Vibration Analysis for
Civil Engineering Structures, Varenna (Lecco),
Italy, October 3-5, 2011.
[2] Q. Zhang, and X. Su, High-speed optical
measurement for the drumhead vibration, OSAs
Optics InfoBase, Optics Express, Vol. 13, Issue 8,
2005, pp. 3110-3116.
[3] D.M. Freeman, and C.Q. Davis, Using video
microscopy to characterize micro-mechanics of
biological and manmade micro-machines,
Technical Digest of the Solid-State Sensor and
Actuator Workshop, Hilton Head Island SC:
Transducers Research Foundation, Inc, Jun. 1996,
pp. 161-167.
[4] Gordon E. Moore, Cramming more components
onto integrated circuits, Electronics, Volume 38,
Number 8, April 19, 1965
[5] R. Raskar, M.G. Bawendi, A. Velten, E. Lawson,
A. Fritz, and D. Wu, et al., Femto-Photography:
visualizing Photons in motion at a trillion frames
per second, Massachusetts Institute of
Technology, 2011.
[6] Audacity. (2013, Jan. 21). Audacity (ver. 2.0.3)
[Computer program] Available:
http://audacity.sourceforge.net/
[7] Eli Maor, Trigonometric Delights, Universities
Press Ltd., 1998, pp. 200202.
[8] T. Kurita, N. Otsu, N. Abdelmalek, Maximum
likelihood thresholding based on population
mixture models, Pattern Recognition, vol. 25,
Issue 10, October 1992, pp. 12311240
[9] John Canny, A Computational Approach to Edge
Detection, IEEE Trans. on Pattern Analysis and
Machine Intelligence, vol. PAMI-8, no. 6, Nov.
1986.
[10] G. Bradski, and A. Kaehler, Learning OpenCV:
Computer Vision with the OpenCV Library,
O'Reilly Media, Inc., 2008, pp. 105.
[11] Steven Harrington, Computer Graphics-A
Programming Approach, 2nd ed., J. Peters, Ed.
McGraw-Hill, 1987, pp. 400417.
[12] Q. Tian, and M. Huhns, Algorithms for sub-pixel
registration, Computer Vision Graphics and Image
Processing, vol. 35, 1986, pp. 220-233
[13] K. Takita, T. Aoki, Y. Sasaki, T. Higuchi, and K.
Kobayashi, High-Accuracy Sub-pixel Image
IJRET: International Journal of Research in Engineering and Technology eISSN: 2319-1163 | pISSN: 2321-7308
_______________________________________________________________________________________
Volume: 03 Issue: 07 | Jul-2014, Available @ http://www.ijret.org 517
Registration Based on Phase-Only Correlation,
IEICE Trans. Fundamentals, vol. E86-A No. 8,
2003, pp. 1925-1933.
[14] GoldWave Inc. (2013, Jan. 24). GoldWave (ver.
5.68) [Computer program] Available:
http://www.goldwave.com/
[15] Paul Boersma, and David Weenink. (2013, Feb.
09). Praat: doing phonetics by computer (Ver.
5.3.41) [Computer program]. Available:
http://www.praat.org/
[16] Jerri, A.J., The Shannon sampling theoremIts
various extensions and applications: A tutorial
review, Proceedings of the IEEE, 1979, vol. 67,
Issue. 4.
[17] M. Tekavi, Active noise control, presented at
the Seminar 2010-2011, Faculty for Mathematics in
Physics, Section for Physics, Ljubljana, Slovenia,
2010, University of Ljubljana.
[18] S.M. Kuo, D.R. Morgan, Active noise control: a
tutorial review, Proceedings of the IEEE, vol.87,
no.6, Jun 1999, pp. 943- 973.
[19] A. Yilmaz, O. Javed, and M. Shah, Object
Tracking: A Survey, ACM Computing Surveys,
vol. 38, no. 4, 2006.
[20] O.A. Filatova, I.D. Fedutin, A.M. Burdin, and E.
Hoyt, Using a mobile hydrophone stereo system
for real-time acoustic localization of killer whales
(Orcinus orca), Applied Acoustics, 2006, pp.
1243-1248.
[21] X. Zhang, X. Ke, and Z. Zhang, Research on
Micro-Electro-Mechanical-Systems Digital
Geophone, Artificial Intelligence and
Computational Intelligence (AICI), 2010
International Conference on, vol. 3, 23-24 Oct.
2010, pp. 414-417.
[22] A.D. Pierce, Acoustics-An Introduction to its
Physical Principles and Applications, Melville:
Acoustical Society of America, 1989, pp. 107-109.
[23] A. Velten, T. Willwacher, O. Gupta, A.
Veeraraghavan, M.G. Bawendi, and R. Raskar,
Recovering three-dimensional shape around a
corner using ultrafast time-of-flight imaging,
Nature Communications 3 (2012), pp. 745.
BIOGRAPHIES
Aaswad A. Satpute has pursued
Computer Engineering from Sardar Patel
Institute of Technology (SPIT), Mumbai,
India in 2013. He has been keenly
interested in research right from a very
young age. He has successfully devised a
method to Plot on Real Number Line. His researches in
the field of Mathematics include easy method to compute
tables. His work has been appreciated by eminent people
from India and around the world.
Sheetal M. Pandrekar has completed
Computer Engineering from Sardar Patel
Institute of Technology (SPIT), Mumbai,
India in 2013. Since then, she has been
working on many start-up endeavors and
she also worked as a Junior Researcher at
HESA (Hansa Embedded Systems Academy) in Mumbai,
India. She takes profound interest in teaching and has
conducted seminars and training sessions on various topics
in Computer Science.
Dr. Imdad Ali Rizvi received his PhD
from Indian Institute of Technology (IIT)
Bombay, India in 2012. His areas of
research include satellite image
processing, object-based image analysis
and multi-resolution algorithms for
remote sensing and image processing. He is a life member
of Indian Society for Remote Sensing and Resources
Engineers Association. He has about 30 co-authored papers
in international conferences and journals in the areas of
image processing and analysis. His area of research is
supervised image classification.
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Flood Related Disasters Concerned To Urban Flooding in Bangalore, IndiaDocument8 pagesFlood Related Disasters Concerned To Urban Flooding in Bangalore, IndiaInternational Journal of Research in Engineering and TechnologyNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Wind Damage To Trees in The Gitam University Campus at Visakhapatnam by Cyclone HudhudDocument11 pagesWind Damage To Trees in The Gitam University Campus at Visakhapatnam by Cyclone HudhudInternational Journal of Research in Engineering and TechnologyNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Wind Damage To Buildings, Infrastrucuture and Landscape Elements Along The Beach Road at VisakhapatnamDocument10 pagesWind Damage To Buildings, Infrastrucuture and Landscape Elements Along The Beach Road at VisakhapatnamInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Likely Impacts of Hudhud On The Environment of VisakhapatnamDocument3 pagesLikely Impacts of Hudhud On The Environment of VisakhapatnamInternational Journal of Research in Engineering and TechnologyNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Effect of Lintel and Lintel Band On The Global Performance of Reinforced Concrete Masonry In-Filled FramesDocument9 pagesEffect of Lintel and Lintel Band On The Global Performance of Reinforced Concrete Masonry In-Filled FramesInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Groundwater Investigation Using Geophysical Methods - A Case Study of Pydibhimavaram Industrial AreaDocument5 pagesGroundwater Investigation Using Geophysical Methods - A Case Study of Pydibhimavaram Industrial AreaInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Enhancing Post Disaster Recovery by Optimal Infrastructure Capacity BuildingDocument8 pagesEnhancing Post Disaster Recovery by Optimal Infrastructure Capacity BuildingInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Impact of Flood Disaster in A Drought Prone Area - Case Study of Alampur Village of Mahabub Nagar DistrictDocument5 pagesImpact of Flood Disaster in A Drought Prone Area - Case Study of Alampur Village of Mahabub Nagar DistrictInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shear Strength of RC Deep Beam Panels - A ReviewDocument15 pagesShear Strength of RC Deep Beam Panels - A ReviewInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Low Cost Wireless Sensor Networks and Smartphone Applications For Disaster Management and Improving Quality of LifeDocument5 pagesLow Cost Wireless Sensor Networks and Smartphone Applications For Disaster Management and Improving Quality of LifeInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Role of Voluntary Teams of Professional Engineers in Dissater Management - Experiences From Gujarat EarthquakeDocument6 pagesRole of Voluntary Teams of Professional Engineers in Dissater Management - Experiences From Gujarat EarthquakeInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Review Study On Performance of Seismically Tested Repaired Shear WallsDocument7 pagesReview Study On Performance of Seismically Tested Repaired Shear WallsInternational Journal of Research in Engineering and TechnologyNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Monitoring and Assessment of Air Quality With Reference To Dust Particles (Pm10 and Pm2.5) in Urban EnvironmentDocument3 pagesMonitoring and Assessment of Air Quality With Reference To Dust Particles (Pm10 and Pm2.5) in Urban EnvironmentInternational Journal of Research in Engineering and TechnologyNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Cyclone Disaster On Housing and Coastal AreaDocument7 pagesCyclone Disaster On Housing and Coastal AreaInternational Journal of Research in Engineering and TechnologyNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- A Geophysical Insight of Earthquake Occurred On 21st May 2014 Off Paradip, Bay of BengalDocument5 pagesA Geophysical Insight of Earthquake Occurred On 21st May 2014 Off Paradip, Bay of BengalInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Detection of Hazard Prone Areas in The Upper Himalayan Region in Gis EnvironmentDocument9 pagesDetection of Hazard Prone Areas in The Upper Himalayan Region in Gis EnvironmentInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Hudhud Cyclone - A Severe Disaster in VisakhapatnamDocument8 pagesHudhud Cyclone - A Severe Disaster in VisakhapatnamInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Assessment of Seismic Susceptibility of RC BuildingsDocument4 pagesAssessment of Seismic Susceptibility of RC BuildingsInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Can Fracture Mechanics Predict Damage Due Disaster of StructuresDocument6 pagesCan Fracture Mechanics Predict Damage Due Disaster of StructuresInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Coastal Zones - Seismic Vulnerability An Analysis From East Coast of IndiaDocument4 pagesCoastal Zones - Seismic Vulnerability An Analysis From East Coast of IndiaInternational Journal of Research in Engineering and TechnologyNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Comparative Study of The Forces in G+5 and G+10 Multi Storied Buildings Subjected To Different Wind SpeedsDocument10 pagesComparative Study of The Forces in G+5 and G+10 Multi Storied Buildings Subjected To Different Wind SpeedsInternational Journal of Research in Engineering and TechnologyNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Developing of Decision Support System For Budget Allocation of An R&D OrganizationDocument6 pagesDeveloping of Decision Support System For Budget Allocation of An R&D OrganizationInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Effect of Hudhud Cyclone On The Development of Visakhapatnam As Smart and Green City - A Case StudyDocument4 pagesEffect of Hudhud Cyclone On The Development of Visakhapatnam As Smart and Green City - A Case StudyInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Challenges in Oil and Gas Industry For Major Fire and Gas Leaks - Risk Reduction MethodsDocument4 pagesChallenges in Oil and Gas Industry For Major Fire and Gas Leaks - Risk Reduction MethodsInternational Journal of Research in Engineering and TechnologyNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Analytical Solutions For Square Shape PressureDocument4 pagesAnalytical Solutions For Square Shape PressureInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Disaster Recovery Sustainable HousingDocument4 pagesDisaster Recovery Sustainable HousingInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Cpw-Fed Uwb Antenna With Wimax Band-Notched CharacteristicsDocument5 pagesCpw-Fed Uwb Antenna With Wimax Band-Notched CharacteristicsInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Brain Tumor Segmentation Using Asymmetry Based Histogram Thresholding and K-Means ClusteringDocument4 pagesBrain Tumor Segmentation Using Asymmetry Based Histogram Thresholding and K-Means ClusteringInternational Journal of Research in Engineering and TechnologyNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Rate Adaptive Resource Allocation in Ofdma Using Bees AlgorithmDocument5 pagesRate Adaptive Resource Allocation in Ofdma Using Bees AlgorithmInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Transmission LinesDocument23 pagesTransmission Linesravi010582No ratings yet
- Audiography Notes PDFDocument8 pagesAudiography Notes PDFKhatiwada Anoop100% (1)
- Lab Report No 3 Standing Waves On Stings Phyisc 212Document7 pagesLab Report No 3 Standing Waves On Stings Phyisc 212rodneyperuNo ratings yet
- The Nature of Sound WavesDocument21 pagesThe Nature of Sound WavesJohn_2998No ratings yet
- Dual Nature Worksheet TUITIONDocument5 pagesDual Nature Worksheet TUITIONAltaf Hussain KhanNo ratings yet
- Earmolds Practical Considerations To Improve Performance in Hearing AidsDocument9 pagesEarmolds Practical Considerations To Improve Performance in Hearing AidsayubNo ratings yet
- X-Ray Diffraction in CrystalDocument67 pagesX-Ray Diffraction in CrystalAnonymous BW2VsFifi9No ratings yet
- Ftir 1Document29 pagesFtir 1Saeed RashidNo ratings yet
- Ripple Tank Lab ManualDocument4 pagesRipple Tank Lab ManualRaja Wajhi Ullah NisarNo ratings yet
- 3 Transmission LinesDocument19 pages3 Transmission Linesfathin noorshafirahNo ratings yet
- Radar Principle - SkyRadar PDFDocument1 pageRadar Principle - SkyRadar PDFDivine Grace BurmalNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Field Geophysics VSP Quality Control ChecksDocument8 pagesField Geophysics VSP Quality Control ChecksEduardo Rodriguez100% (1)
- OscillationsDocument18 pagesOscillationsIram JamilNo ratings yet
- G2WF-01V: Electrical DataDocument2 pagesG2WF-01V: Electrical Databmc100% (1)
- Week018-019 Presentation Sounds PPT PART 1 PhysicsDocument31 pagesWeek018-019 Presentation Sounds PPT PART 1 PhysicsRouie john dizon100% (1)
- Revision Notes Chapter - 13 Sound: Sound: Vibrations That Travel Through The Air or Another Medium and Can Be Heard WhenDocument5 pagesRevision Notes Chapter - 13 Sound: Sound: Vibrations That Travel Through The Air or Another Medium and Can Be Heard WhenAarush SharmaNo ratings yet
- DWDM CompleteDocument62 pagesDWDM Completepriyanka joshiNo ratings yet
- Test Bank For Patient Care in Radiography 9th Edition by EhrlichDocument4 pagesTest Bank For Patient Care in Radiography 9th Edition by EhrlichCheryl Lott100% (25)
- X-ray formulas and concepts guideDocument5 pagesX-ray formulas and concepts guideAdil HasanovNo ratings yet
- Loudspeaker Cabinet Diffraction: Tore Skogberg Acoustical Technology Ørsted DTU - 2006Document176 pagesLoudspeaker Cabinet Diffraction: Tore Skogberg Acoustical Technology Ørsted DTU - 2006Alexander ShivaNo ratings yet
- Dolby Home Theatre Speaker Guide 5.1 6 8Document4 pagesDolby Home Theatre Speaker Guide 5.1 6 8goudkampNo ratings yet
- Science 10 q2 Module 3 Week 3Document13 pagesScience 10 q2 Module 3 Week 3nick終100% (1)
- Superposition Part 4 Diffraction GratingDocument18 pagesSuperposition Part 4 Diffraction GratingFinley MzgNo ratings yet
- Modes in Optical FibersDocument10 pagesModes in Optical FibersAdamStone100% (1)
- Science 10 2nd Quarter ExamDocument2 pagesScience 10 2nd Quarter ExamKenneth Rose BajeNo ratings yet
- Electrical Optical PropertiesDocument17 pagesElectrical Optical Propertieschen18111004 KFUEITNo ratings yet
- OADM 12I6430 S35A Web ENDocument2 pagesOADM 12I6430 S35A Web ENLuiz Gustavo Santos AlbertoNo ratings yet
- WS 7: Using Diffraction Gratings: InstructionsDocument4 pagesWS 7: Using Diffraction Gratings: InstructionsDaksh NairNo ratings yet
- Survey and design guidelines for line of sight microwave linksDocument77 pagesSurvey and design guidelines for line of sight microwave linksGagandeep Singh SodhiNo ratings yet
- Biconical Antenna Design and ApplicationsDocument7 pagesBiconical Antenna Design and ApplicationsAmollohNo ratings yet
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationFrom EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNo ratings yet
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireFrom EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNo ratings yet
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)From EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)No ratings yet
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)