You might also like
- ECE4003 Embedded-System-Design ETH 1 AC40Document3 pagesECE4003 Embedded-System-Design ETH 1 AC40Grace ARORANo ratings yet
- CoDeSys SP 32 Bit Embedded - EDocument70 pagesCoDeSys SP 32 Bit Embedded - EKamalakannan KaruppiahNo ratings yet
- SRM (2011) of I SemDocument112 pagesSRM (2011) of I SemSourabh GangbhojNo ratings yet
- Practical Programmable Circuits: A Guide to PLDs, State Machines, and MicrocontrollersFrom EverandPractical Programmable Circuits: A Guide to PLDs, State Machines, and MicrocontrollersNo ratings yet
- OpenCL in Action: How to accelerate graphics and computationsFrom EverandOpenCL in Action: How to accelerate graphics and computationsNo ratings yet
- Course 24. Embedded Systems (Video Course) Faculty Coordinator(s) : 1Document4 pagesCourse 24. Embedded Systems (Video Course) Faculty Coordinator(s) : 1Shaheda JamalNo ratings yet
- T.Y.B.sc. Computer Science 30juneDocument53 pagesT.Y.B.sc. Computer Science 30juneAshutosh MorwalNo ratings yet
- CC ZG502 Course HandoutDocument10 pagesCC ZG502 Course HandoutpoonamNo ratings yet
- 21ai404 Os Unit IDocument118 pages21ai404 Os Unit IK.Darshan KannanNo ratings yet
- Programmig Ad Problem Solvig Through C': RatioaleDocument19 pagesProgrammig Ad Problem Solvig Through C': RatioaleCS and IT Department VBPCNo ratings yet
- Embedded System (9168)Document5 pagesEmbedded System (9168)Victoria FrancoNo ratings yet
- Cse 2022Document626 pagesCse 2022inkyNo ratings yet
- Computer Engineering Sem-1Document8 pagesComputer Engineering Sem-1waniasimNo ratings yet
- M.sc.F.Y. Syllabus ComputerScienceRevisedDocument17 pagesM.sc.F.Y. Syllabus ComputerScienceRevisedShrikant BhusalwadNo ratings yet
- Eui Embedded Course Content Website 2Document3 pagesEui Embedded Course Content Website 2mahmooudhelmyy1No ratings yet
- Third Semester SyllabusDocument10 pagesThird Semester SyllabusDil Prasad KunwarNo ratings yet
- Print OutDocument11 pagesPrint OutKamlesh SilagNo ratings yet
- Complement and R's Complement), Fixed Point RepresentationDocument7 pagesComplement and R's Complement), Fixed Point RepresentationBishal ShahiNo ratings yet
- System Software Notes 10CS52Document206 pagesSystem Software Notes 10CS52Honey SoniNo ratings yet
- Vlsi PT 2nd Year SyllabusDocument20 pagesVlsi PT 2nd Year SyllabusMANGAL KUMAR MOHAPATRANo ratings yet
- BTech - 5sem - CE - Booklet - 2022-23-ODDDocument37 pagesBTech - 5sem - CE - Booklet - 2022-23-ODDjay patelNo ratings yet
- University of Mumbai University of Mumbai University of MumbaiDocument19 pagesUniversity of Mumbai University of Mumbai University of MumbaiJaya PillaiNo ratings yet
- Cse-V-Systems Software NotesDocument151 pagesCse-V-Systems Software NotesSreemol RNo ratings yet
- V-Soft Consulting Group, Inc.: (Advanced Programming Linq, WCF and WPF) - Total 78 HoursDocument7 pagesV-Soft Consulting Group, Inc.: (Advanced Programming Linq, WCF and WPF) - Total 78 HoursRahul VaidyaNo ratings yet
- Computer Organization Course Outline To Be Printed-1Document2 pagesComputer Organization Course Outline To Be Printed-1habtamu fentewNo ratings yet
- PG Diploma in Embedded Systems Design (PG-DESD) Course FocusDocument7 pagesPG Diploma in Embedded Systems Design (PG-DESD) Course Focusabhijeetv2No ratings yet
- Course Outline - Computer Organization and Architecture1 dt-2024-02-24 15-49-19Document5 pagesCourse Outline - Computer Organization and Architecture1 dt-2024-02-24 15-49-19Caleb fikaduNo ratings yet
- Embedded System QBDocument20 pagesEmbedded System QBVIGNESH L RNo ratings yet
- FMTC0302 - Lesson Plan COADocument8 pagesFMTC0302 - Lesson Plan COAdarshankumar999No ratings yet
- Introduction To Computer ConceptsDocument5 pagesIntroduction To Computer ConceptsVikram Rao100% (1)
- Microprocessor 4th SemDocument316 pagesMicroprocessor 4th SemDaggupatiHarishNo ratings yet
- Cisco CCNA Training: Training Packages Remote Lab About - Resources MembersDocument14 pagesCisco CCNA Training: Training Packages Remote Lab About - Resources Membersa2009700No ratings yet
- Syllabus For Fundamentals of The Embedded Systems: Programming ExamplesDocument3 pagesSyllabus For Fundamentals of The Embedded Systems: Programming ExamplesvarshaNo ratings yet
- HTTP - App - Utu.ac - in - Utuexmanagement - Exammsters - Syllabus - 2021-22 - CS3020 - Computer Fundamentals and OrganizationDocument2 pagesHTTP - App - Utu.ac - in - Utuexmanagement - Exammsters - Syllabus - 2021-22 - CS3020 - Computer Fundamentals and OrganizationOmprakash ChandrakarNo ratings yet
- Syllabus - 5th Semester NEW-1Document12 pagesSyllabus - 5th Semester NEW-1Pritam PaulNo ratings yet
- 10CS45 - MicroprocessorsDocument1 page10CS45 - MicroprocessorsnandanvrNo ratings yet
- NPTEL Phase II - Electrical Engineering - Embedded SystemsDocument4 pagesNPTEL Phase II - Electrical Engineering - Embedded SystemsShalini JainNo ratings yet
- The Night Before ExamsDocument10 pagesThe Night Before ExamsPrashanth AcharNo ratings yet
- Microcontrollers Notes For IV Sem ECE StudentsDocument19 pagesMicrocontrollers Notes For IV Sem ECE StudentsVigneshwar DhamodharanNo ratings yet
- M.C.A. Mumbai UniversityDocument30 pagesM.C.A. Mumbai Universitymalisachin5126No ratings yet
- ME VLSI & EmdDocument58 pagesME VLSI & EmdAnil V. WalkeNo ratings yet
- Automotive Embedded Systems TocDocument3 pagesAutomotive Embedded Systems TocMerly Asuncion RojasNo ratings yet
- ITHandBook-English Arabic NOORPublishingDocument123 pagesITHandBook-English Arabic NOORPublishingjheraNo ratings yet
- U18PCEC701 Embedded SystemDocument4 pagesU18PCEC701 Embedded SystemSangeethaNo ratings yet
- 12Pcs05 Advanced Java Programming: 4 Credits Unit - IDocument4 pages12Pcs05 Advanced Java Programming: 4 Credits Unit - IJothi KumarNo ratings yet
- 29-Shailendra & RiturajDocument49 pages29-Shailendra & RiturajAnonymous NmKcrDPPrNo ratings yet
- 3-Emebbedd Question BankDocument31 pages3-Emebbedd Question BankamulumullaiNo ratings yet
- M.tech-ECE-Embedded Systems (ES) - SEM1 Course Structure & SyllabiDocument8 pagesM.tech-ECE-Embedded Systems (ES) - SEM1 Course Structure & Syllabisatraj5No ratings yet
- Cricbuzz Project ManagementDocument41 pagesCricbuzz Project Managementyuvaraj romeo100% (1)
- CP7204-Advanced Operating SystemsDocument7 pagesCP7204-Advanced Operating SystemsselviseelanNo ratings yet
- Microcontroller Architecture and Organization: Unit IDocument6 pagesMicrocontroller Architecture and Organization: Unit IhemanthdreamzNo ratings yet
- ECT 206 Computer Organization and Microcontroller-SyllabusDocument8 pagesECT 206 Computer Organization and Microcontroller-SyllabusVilayil jestinNo ratings yet
- 6th Sem.Document17 pages6th Sem.suraj pahariNo ratings yet
- Swe2002 Computer-Networks Eth 1.0 37 Swe2002Document4 pagesSwe2002 Computer-Networks Eth 1.0 37 Swe2002Naveen VnvNo ratings yet
- Emebbedd Question BankDocument25 pagesEmebbedd Question Banksujith100% (3)
- SyllabusDocument3 pagesSyllabusDev Shankar PaulNo ratings yet
- Fourth Sem SyllabusDocument8 pagesFourth Sem SyllabussreerajmndNo ratings yet
- Single and Multi-Chip Microcontroller Interfacing: For the Motorola 6812From EverandSingle and Multi-Chip Microcontroller Interfacing: For the Motorola 6812No ratings yet
- A Ble Ranking Based Indoor Positioning System For Generic SmartphonesDocument4 pagesA Ble Ranking Based Indoor Positioning System For Generic SmartphonesRajasekar PanneerselvamNo ratings yet
- Chapter - 6 Evolution of Msp430 Family Microcontrollers: S.No. Name of The Sub-Title Page NoDocument19 pagesChapter - 6 Evolution of Msp430 Family Microcontrollers: S.No. Name of The Sub-Title Page NoRajasekar PanneerselvamNo ratings yet
- Classification of Soil PH Ranges: (Hide)Document6 pagesClassification of Soil PH Ranges: (Hide)Rajasekar PanneerselvamNo ratings yet
- Final Pothole ReportDocument90 pagesFinal Pothole ReportRajasekar PanneerselvamNo ratings yet
- PH Sensor ReportDocument7 pagesPH Sensor ReportRajasekar PanneerselvamNo ratings yet
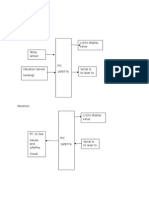
- TransmitterDocument2 pagesTransmitterRajasekar PanneerselvamNo ratings yet
- A Class of Co-Design Problems With Cyclic Constraints and Their SolutionDocument8 pagesA Class of Co-Design Problems With Cyclic Constraints and Their SolutionRajasekar PanneerselvamNo ratings yet
- Android Based ProjectDocument4 pagesAndroid Based ProjectRajasekar PanneerselvamNo ratings yet
- A Transmitter or A Receiver Consisting of Two Strongly Coupled Resonators For Enhanced Resonant Coupling in Wireless Power TransferDocument3 pagesA Transmitter or A Receiver Consisting of Two Strongly Coupled Resonators For Enhanced Resonant Coupling in Wireless Power TransferRajasekar PanneerselvamNo ratings yet
- RTC Controlled On OffDocument53 pagesRTC Controlled On OffRajasekar PanneerselvamNo ratings yet
- A Proposed Model For Radio Frequency Systems To Tracking Trains Via GPSDocument8 pagesA Proposed Model For Radio Frequency Systems To Tracking Trains Via GPSRajasekar PanneerselvamNo ratings yet
- DTMF Based Wireless RobotDocument79 pagesDTMF Based Wireless RobotVarun PantNo ratings yet
- Analysis of Distance-Based Location Management in Wireless Communication NetworksDocument14 pagesAnalysis of Distance-Based Location Management in Wireless Communication NetworksRajasekar PanneerselvamNo ratings yet
- The Study On Design Speech-Control Power Point Presentation Tool Using Arm9 (Abstract)Document3 pagesThe Study On Design Speech-Control Power Point Presentation Tool Using Arm9 (Abstract)Rajasekar PanneerselvamNo ratings yet
- Native InstallDocument64 pagesNative InstallSanthosh KrishnanNo ratings yet
- MELSEC Q Series: Multiple CPU SystemDocument268 pagesMELSEC Q Series: Multiple CPU Systemajma86No ratings yet
- Biological Science 6th Edition Freeman Test BankDocument21 pagesBiological Science 6th Edition Freeman Test Bankagleamamusable.pwclcq100% (28)
- Tutorial 12 13 14 BBBL2023Document16 pagesTutorial 12 13 14 BBBL2023YANG YUN RUINo ratings yet
- Import The Database File in OralceDocument5 pagesImport The Database File in OralcewesternrailwayNo ratings yet
- 10 Computer Applications-Cyber Ethics (Part 1) - NotesDocument4 pages10 Computer Applications-Cyber Ethics (Part 1) - NotesSAVITAR GAMINGNo ratings yet
- Ee8591 DSPDocument28 pagesEe8591 DSPtamizh kaviNo ratings yet
- Laptop Fault BookDocument38 pagesLaptop Fault Bookredsky991100% (1)
- Decision Analysis Using Microsoft Excel PDFDocument400 pagesDecision Analysis Using Microsoft Excel PDFimran_chaudhryNo ratings yet
- Ubd Application in WellfloDocument3 pagesUbd Application in WellfloAllan Troy SalazarNo ratings yet
- Beyblade Burst Scanning InstructionsDocument1 pageBeyblade Burst Scanning InstructionsJagan SathishNo ratings yet
- Aralin 1 - Dangal Sa PaggawaDocument27 pagesAralin 1 - Dangal Sa PaggawaPupung MartinezNo ratings yet
- Analysis of Online Retail Business Development Using Business Model CanvasDocument10 pagesAnalysis of Online Retail Business Development Using Business Model CanvasInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Supply Chain Version 2Document37 pagesSupply Chain Version 2Abdelhamid Harakat100% (1)
- Comp6Document2 pagesComp6habeebschoolNo ratings yet
- OmniOutliner 4 For Mac User ManualDocument124 pagesOmniOutliner 4 For Mac User Manualagostino_cirilloNo ratings yet
- L .. Eee - .: Distribution Voltage RegulatorsDocument11 pagesL .. Eee - .: Distribution Voltage RegulatorsSirajulNo ratings yet
- Module 25: Programming in C++: Partha Pratim DasDocument17 pagesModule 25: Programming in C++: Partha Pratim Dasswaraj bhatnagarNo ratings yet
- Ilyin2016 PDFDocument6 pagesIlyin2016 PDFAnonymous fqHGrbwxeFNo ratings yet
- Overview of The Lms - Kemi Vertual CampusDocument30 pagesOverview of The Lms - Kemi Vertual CampusJOHN MWANGINo ratings yet
- Optimization: 1 MotivationDocument20 pagesOptimization: 1 MotivationSCRBDusernmNo ratings yet
- PHP MySQLDocument85 pagesPHP MySQLDevendraNo ratings yet
- Future of IT Audit Report - Res - Eng - 0219Document20 pagesFuture of IT Audit Report - Res - Eng - 0219Immanuel GiuleaNo ratings yet
- Product Catalog: Smart Test Devices For Reliable Electric Power SystemsDocument32 pagesProduct Catalog: Smart Test Devices For Reliable Electric Power SystemsbcqbaoNo ratings yet
- Hydro-Probe: Digital Microwave Moisture Sensor For Bins, Silos and ConveyorsDocument4 pagesHydro-Probe: Digital Microwave Moisture Sensor For Bins, Silos and ConveyorsJulio CaychoNo ratings yet
- Schedule For Theory Examination (Even Sem.) - 2011-2012 B.Tech., First Year-Ii SemesterDocument66 pagesSchedule For Theory Examination (Even Sem.) - 2011-2012 B.Tech., First Year-Ii SemesterSheetal P. ManiNo ratings yet
- Form 15: Name of Member 1Document2 pagesForm 15: Name of Member 1FSADFNo ratings yet
- Chapter10 Econometrics DummyVariableModelDocument8 pagesChapter10 Econometrics DummyVariableModelAbdullah KhatibNo ratings yet
- Soliton and ParticleDocument6 pagesSoliton and ParticleIis YuliaNo ratings yet
- Table of LFSRDocument6 pagesTable of LFSRMayur AnvekarNo ratings yet