You might also like
- Valores SingularesDocument22 pagesValores SingularesAmIn20122No ratings yet
- Informe Práctica SemaforoDocument5 pagesInforme Práctica SemaforoDiana Mayerly BOTERO ARIASNo ratings yet
- Control Digital Taller 1Document3 pagesControl Digital Taller 1Omar David Peña IbarraNo ratings yet
- Informe Control Robusto II - NewDocument21 pagesInforme Control Robusto II - NewCarmen Rosa Amau Quispe0% (1)
- Trabajo 1 - Control No LinealDocument10 pagesTrabajo 1 - Control No LinealCristian CentenoNo ratings yet
- Solución Primer Examen Parcial ELT 2550 - Sistemas de Control IDocument8 pagesSolución Primer Examen Parcial ELT 2550 - Sistemas de Control IFabricio FloresNo ratings yet
- Ejercicios Del Capítulo VIIDocument2 pagesEjercicios Del Capítulo VIIalonso vargasNo ratings yet
- Sistema de control análogo - Parcial IDocument3 pagesSistema de control análogo - Parcial IAnderson TrulloNo ratings yet
- Sistemas de Tanques Independientes Control MultivariableDocument13 pagesSistemas de Tanques Independientes Control MultivariableByron Paul CajamarcaNo ratings yet
- CRITERIO DE ESTABILIDAD DE JURY - Mauricio Lopez Vazquez 8°ADocument10 pagesCRITERIO DE ESTABILIDAD DE JURY - Mauricio Lopez Vazquez 8°AMau Lopez VazquezNo ratings yet
- Informe Final SCDDocument20 pagesInforme Final SCDAdoni FernandezNo ratings yet
- Margen de FaseDocument5 pagesMargen de FaseJheyson Chuquispuma MagallanesNo ratings yet
- Convertidores analógicos y digitales: tipos, características y usosDocument4 pagesConvertidores analógicos y digitales: tipos, características y usosAlber Lim GboNo ratings yet
- Problemario Estabilidad Segúnda ParteDocument18 pagesProblemario Estabilidad Segúnda ParteCarlos Uriel Martinez TinocoNo ratings yet
- 1.1-TEC - DEL DIS DE COMP EN SERIE EN Dom TiempoDocument126 pages1.1-TEC - DEL DIS DE COMP EN SERIE EN Dom TiempoDanny Erquinio LopezNo ratings yet
- Lab2 MDocument9 pagesLab2 MJulio Orlando MedranoNo ratings yet
- Actividad 4 Ingenieria de ControlDocument8 pagesActividad 4 Ingenieria de ControlDiego HernandezNo ratings yet
- Transformada Z (Informe Ieee) .1Document6 pagesTransformada Z (Informe Ieee) .1misusibuNo ratings yet
- Control Predictivo y Cascada en Ingeniería de SistemasDocument32 pagesControl Predictivo y Cascada en Ingeniería de SistemasGeraldine Burgos GonzalesNo ratings yet
- Diseño de Controladores Digitales - DeadbeatDocument8 pagesDiseño de Controladores Digitales - DeadbeatFelipe MoreraNo ratings yet
- Arrays Leds 11x11 LABVIEWDocument11 pagesArrays Leds 11x11 LABVIEWcheNo ratings yet
- Taller - Conceptos Basicos de ControlDocument2 pagesTaller - Conceptos Basicos de ControlJoan Manuel Moreno RojasNo ratings yet
- Control Por Realimentacion de EstadosDocument44 pagesControl Por Realimentacion de EstadosJose FonsecaNo ratings yet
- Sistemas en Tiempo ContinuoDocument34 pagesSistemas en Tiempo ContinuoEl CanoeroNo ratings yet
- Diseño de controladores P, PI y PID para un motor DC utilizando SISOTOOL de MATLABDocument31 pagesDiseño de controladores P, PI y PID para un motor DC utilizando SISOTOOL de MATLABNoéArguetaNo ratings yet
- Informe PidDocument8 pagesInforme PidEduard Humberto Garcia CastilloNo ratings yet
- Lab 06. Diagrama de Bloques DiscretosDocument14 pagesLab 06. Diagrama de Bloques DiscretosLeonardo VieraNo ratings yet
- Laboratorio de FiltrosDocument17 pagesLaboratorio de FiltrosLuis Mendoza100% (1)
- CTM - Ejemplo de Control Digital - Barra y BolaDocument6 pagesCTM - Ejemplo de Control Digital - Barra y BolaWilson Barco MNo ratings yet
- Control PID Discreto y ConexionXBeeDocument29 pagesControl PID Discreto y ConexionXBeeAlexander ValenciaNo ratings yet
- PIDDocument9 pagesPIDMaria Monica Rodriguez BeltranNo ratings yet
- Trabajo Final (Pendulo de Furuta) - Control Automatico IIDocument21 pagesTrabajo Final (Pendulo de Furuta) - Control Automatico IIAnthonny Monrroy RodriguezNo ratings yet
- Toolbox de Robótica: Simulación y AplicacionesDocument8 pagesToolbox de Robótica: Simulación y AplicacionesSergio SorucoNo ratings yet
- OsciladoresDocument4 pagesOsciladoresHector Cajilema100% (1)
- 4 CAPITULO 2 Modelamiento DinamicoDocument32 pages4 CAPITULO 2 Modelamiento DinamicoJuanManuelHurtadoValdiviaNo ratings yet
- Variable de Estado Por RealimentaciónDocument7 pagesVariable de Estado Por Realimentaciónalenno1No ratings yet
- Lab 02 Transformada Z InversaDocument3 pagesLab 02 Transformada Z InversaJavier EsquivelNo ratings yet
- SISTEMA #3. - PÉNDULO DE FURUTA CorregidoDocument26 pagesSISTEMA #3. - PÉNDULO DE FURUTA CorregidoSergioAugustoBaldeonNo ratings yet
- Características del sistema de control en cascada para motores de corriente continuaDocument3 pagesCaracterísticas del sistema de control en cascada para motores de corriente continuaRoland CaixaNo ratings yet
- Simulación analógica de un sistema linealDocument7 pagesSimulación analógica de un sistema linealIVAN ALONSO CCAHUACHIA LETONANo ratings yet
- Introducción A Los Controladores PIDDocument24 pagesIntroducción A Los Controladores PIDVictor ReyesNo ratings yet
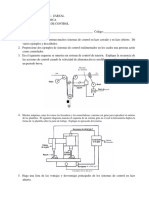
- Primera Práctica de Ingeniería de Control Automático Ii: Duración: 110 Minutos FECHA 5-12-2021 Con Elementos de ConsultaDocument1 pagePrimera Práctica de Ingeniería de Control Automático Ii: Duración: 110 Minutos FECHA 5-12-2021 Con Elementos de ConsultaGustavo Dioses SiguasNo ratings yet
- Cancelador de EcoDocument9 pagesCancelador de EcomercielmNo ratings yet
- Teoria de ControlDocument35 pagesTeoria de Controljason martinez100% (1)
- Control de Llenado de Tanques en Lenguaje VHDLDocument5 pagesControl de Llenado de Tanques en Lenguaje VHDLalexander peña0% (1)
- Análisis lugar raíces sistema controlDocument35 pagesAnálisis lugar raíces sistema controlJUAN REYES TRONCOSONo ratings yet
- Implementación de Un Motor DC Con Control Lógica DifusaDocument12 pagesImplementación de Un Motor DC Con Control Lógica DifusaDavid ChoquehuancaNo ratings yet
- PROYECTO Ball Beam Control 2012Document15 pagesPROYECTO Ball Beam Control 2012CM35100% (3)
- Control de Instrumentacion PDFDocument8 pagesControl de Instrumentacion PDFLania100% (1)
- Resolución EXAMEN FINALDocument3 pagesResolución EXAMEN FINALOscarinho PereyraNo ratings yet
- Características de Los PIC's de Gama Baja, Media y Alta.Document5 pagesCaracterísticas de Los PIC's de Gama Baja, Media y Alta.Vic ZimmermanNo ratings yet
- Examen Parcial Control Digital 2021ADocument2 pagesExamen Parcial Control Digital 2021AxavierNo ratings yet
- Decodificador BCD A 7 Segmentos VHDLDocument11 pagesDecodificador BCD A 7 Segmentos VHDLpaco_tun100% (1)
- Lab 13 Control Monoarticular Realimentado PDFDocument2 pagesLab 13 Control Monoarticular Realimentado PDFMarc LlNo ratings yet
- Labo 4 Filtros DigitalesDocument13 pagesLabo 4 Filtros DigitaleswilliamNo ratings yet
- Diseño de compensadores en dominio de frecuenciaDocument105 pagesDiseño de compensadores en dominio de frecuenciamayquer lin delgadillo perezNo ratings yet
- Lab 4 Sistemas de Control 13102021Document8 pagesLab 4 Sistemas de Control 13102021Adalid elaprendizNo ratings yet
- Lab 4 Sistemas de Control 19042022Document9 pagesLab 4 Sistemas de Control 19042022Igor Alberto Quezada NikulinaNo ratings yet
- Prácticas de redes de datos e industrialesFrom EverandPrácticas de redes de datos e industrialesRating: 4 out of 5 stars4/5 (5)
- 07 Calid MartinDocument6 pages07 Calid MartinFrancisco GomezNo ratings yet
- La Mejor Sal PDFDocument98 pagesLa Mejor Sal PDFOscar Osorio100% (1)
- Programa Nuevostalentos2018Document2 pagesPrograma Nuevostalentos2018HUACHOS.COMNo ratings yet
- Lectura S2Document24 pagesLectura S2Francisco GomezNo ratings yet
- Tarea6-Caso 6 SelfBook A Botica ChinaDocument5 pagesTarea6-Caso 6 SelfBook A Botica ChinaFrancisco Gomez100% (1)
- Horario Puntos de VentaDocument1 pageHorario Puntos de VentaFrancisco GomezNo ratings yet
- No Te Cases Si Tu Pareja Hace Unas de Estas 9 CosasDocument8 pagesNo Te Cases Si Tu Pareja Hace Unas de Estas 9 CosasFrancisco GomezNo ratings yet
- Tarea5-Caso 5 BlueberryDocument4 pagesTarea5-Caso 5 BlueberryFrancisco Gomez100% (1)
- Caso Demostrativo Semana 6Document13 pagesCaso Demostrativo Semana 6Francisco GomezNo ratings yet
- Manual de Asistencia DocenteDocument4 pagesManual de Asistencia DocenteFrancisco GomezNo ratings yet
- Rúbrica observación clase Calidad EducativaDocument2 pagesRúbrica observación clase Calidad EducativaFrancisco Gomez50% (2)
- Dominio Del CursoDocument1 pageDominio Del CursoFrancisco GomezNo ratings yet
- 8773 16928 Carta Poder PDFDocument1 page8773 16928 Carta Poder PDFIlich Laura BonifacioNo ratings yet
- Archivos VikiDocument1 pageArchivos VikiFrancisco GomezNo ratings yet
- Reglamento Del ProfesorDocument16 pagesReglamento Del ProfesorFrancisco GomezNo ratings yet
- Cronograma de ActividadesDocument2 pagesCronograma de ActividadesFrancisco GomezNo ratings yet
- Liderazgo SituacionalDocument13 pagesLiderazgo SituacionalIsrael Vel-Mart100% (1)
- Llegaron Nuevos Equipos para El Hospital IIDocument1 pageLlegaron Nuevos Equipos para El Hospital IIFrancisco GomezNo ratings yet
- Indicaciones para La TareaDocument2 pagesIndicaciones para La TareaFrancisco GomezNo ratings yet
- Buena NoticiaDocument1 pageBuena NoticiaFrancisco GomezNo ratings yet
- Pi Cap5Document9 pagesPi Cap5Francisco GomezNo ratings yet
- Seminario Investigacion BiomedicaDocument6 pagesSeminario Investigacion BiomedicaFrancisco GomezNo ratings yet
- Ejemplo de Tarea - Cómo Debe Quedar Tu TrabajoDocument3 pagesEjemplo de Tarea - Cómo Debe Quedar Tu TrabajoFrancisco GomezNo ratings yet
- Calentadores de GLPDocument2 pagesCalentadores de GLPFrancisco GomezNo ratings yet
- 0 Cap2 TransformacionesDocument26 pages0 Cap2 TransformacionesJuvenal TordocilloNo ratings yet
- Guía de Revisión de Fichas de Tareas de Investigación para El BachilleratoDocument8 pagesGuía de Revisión de Fichas de Tareas de Investigación para El BachilleratoFrancisco GomezNo ratings yet
- Clase 1Document19 pagesClase 1Francisco GomezNo ratings yet
- Pi Cap1Document9 pagesPi Cap1Francisco GomezNo ratings yet
- Bicarbonato de SodioDocument3 pagesBicarbonato de SodioFrancisco GomezNo ratings yet
- Procedimiento para Constancia de EgresadoDocument1 pageProcedimiento para Constancia de EgresadoFrancisco GomezNo ratings yet