You might also like
- Mcycle Brak 1pt 1Document78 pagesMcycle Brak 1pt 1Prasanth KumarNo ratings yet
- Gradeability For Automobiles: Akilesh YamsaniDocument7 pagesGradeability For Automobiles: Akilesh YamsaninrjmanitNo ratings yet
- Selection of Spring For Spring Coil Dampers Using An Iterative ApproachDocument5 pagesSelection of Spring For Spring Coil Dampers Using An Iterative Approach8794 Dimplekunwar SolankiNo ratings yet
- MPB-VG: Motorized Hand Low Lift PalletDocument6 pagesMPB-VG: Motorized Hand Low Lift PalletNeil DesaiNo ratings yet
- Inspection & Maintenance Station (IMS) : National Institute For Automotive Inspection, Maintenance and TrainingDocument8 pagesInspection & Maintenance Station (IMS) : National Institute For Automotive Inspection, Maintenance and TrainingAjans VictorNo ratings yet
- AIS List of Automotive StandardDocument7 pagesAIS List of Automotive StandardPermeshwara Nand BhattNo ratings yet
- ENGR6014 Assignment 1 - Brief 2023-2024 (Draft)Document3 pagesENGR6014 Assignment 1 - Brief 2023-2024 (Draft)matthew herbertNo ratings yet
- Simulation of Dynamic Rollover There SH Old For Heavy TrucksDocument9 pagesSimulation of Dynamic Rollover There SH Old For Heavy TrucksDCcoverNo ratings yet
- Indiana UniversityDocument64 pagesIndiana Universitymdasifkhan2013No ratings yet
- Abstract:: Design Report For Baja Saeindia 2018Document10 pagesAbstract:: Design Report For Baja Saeindia 2018AndhdNo ratings yet
- Technical Specification of Wheel Dynamometer 1.1 General: Application Wheel Dia StandardDocument14 pagesTechnical Specification of Wheel Dynamometer 1.1 General: Application Wheel Dia StandardAchal SinghNo ratings yet
- AIS ListDocument8 pagesAIS ListAman KhullarNo ratings yet
- Automotive Transmissions: Based On The Book by Lechner & NaunheimerDocument36 pagesAutomotive Transmissions: Based On The Book by Lechner & NaunheimerMustafa İnanç50% (2)
- Designing Energy Efficient Traction Machines For Electric and Hybrid VehiclesDocument9 pagesDesigning Energy Efficient Traction Machines For Electric and Hybrid VehicleskodeegNo ratings yet
- Reverse Gear Mechanism for Two-WheelersDocument3 pagesReverse Gear Mechanism for Two-WheelersAkhil sharmaNo ratings yet
- 2010 Toyota Yaris FE Model AnalysisDocument31 pages2010 Toyota Yaris FE Model AnalysisIndranil BhattacharyyaNo ratings yet
- List of Published Automotive Industry Standards (Updated On March 12, 2012)Document11 pagesList of Published Automotive Industry Standards (Updated On March 12, 2012)hsaini19762387No ratings yet
- 31 CR Mo V9Document12 pages31 CR Mo V9Jigar M. UpadhyayNo ratings yet
- Vehicle Dynamics: Instructor: Ashok Kumar Pandey EmailDocument10 pagesVehicle Dynamics: Instructor: Ashok Kumar Pandey EmailBALAKRISHNANNo ratings yet
- Steering StandardDocument7 pagesSteering StandardAbinash KumarNo ratings yet
- Modelling and Simulation of Automatic TransmissionDocument7 pagesModelling and Simulation of Automatic TransmissionIJRASETPublicationsNo ratings yet
- Evaluating VDC for Rollover Using SimulationDocument8 pagesEvaluating VDC for Rollover Using Simulationsarba_mihaiNo ratings yet
- Synchro Shift Feel TesterDocument15 pagesSynchro Shift Feel TesterPrakash ChandrasekaranNo ratings yet
- Optimization of Driving Technique of RWD Racing CaDocument9 pagesOptimization of Driving Technique of RWD Racing CaTomas SalinasNo ratings yet
- 2015IDETC VantsevichGray FinalDocument12 pages2015IDETC VantsevichGray FinalHusain KanchwalaNo ratings yet
- 2015IDETC VantsevichGray FinalDocument12 pages2015IDETC VantsevichGray FinalHusain KanchwalaNo ratings yet
- VOLKSWAGEN ALTAIR Vertical Dynamics With MotionSolve 20091104 DboDocument17 pagesVOLKSWAGEN ALTAIR Vertical Dynamics With MotionSolve 20091104 DboAntonio Rodrigues100% (1)
- Vertical Motor Case History Shurafa IIR Rotate 2012Document4 pagesVertical Motor Case History Shurafa IIR Rotate 2012aal_shurafa100% (1)
- R04706112117 PDFDocument6 pagesR04706112117 PDFSantiago UrgilesNo ratings yet
- Final Project Report 1Document99 pagesFinal Project Report 1Sikander GirgoukarNo ratings yet
- Baja PresentationDocument42 pagesBaja PresentationNaveen Sajja RsaNo ratings yet
- Mira CourseworkDocument15 pagesMira Coursework张三疯No ratings yet
- Irjet V5i3171Document3 pagesIrjet V5i3171Tejzas ParabNo ratings yet
- 1 s2.0 S0888613X99000195 MainDocument22 pages1 s2.0 S0888613X99000195 MainQiram IkhwanulNo ratings yet
- Proposal 12982566466719 Phpapp01Document25 pagesProposal 12982566466719 Phpapp01An VerdiereNo ratings yet
- Simulation of Vehicle Response To Throttle Tip-In and Tip-OutDocument38 pagesSimulation of Vehicle Response To Throttle Tip-In and Tip-OutPablo EscobarNo ratings yet
- Modelling of Six Wheeled Electric Transmission Terrain VehicleDocument49 pagesModelling of Six Wheeled Electric Transmission Terrain VehiclecticusorNo ratings yet
- Manga Raju 2008Document10 pagesManga Raju 2008bhakticahdnmNo ratings yet
- Cornering Fatigue Test and Radial Fatigue Test On A Rim With Steps For A Mono-Tyre E-Vehicle Using Finite Element AnalysisDocument8 pagesCornering Fatigue Test and Radial Fatigue Test On A Rim With Steps For A Mono-Tyre E-Vehicle Using Finite Element AnalysisGowtham KumarNo ratings yet
- Robust Yaw Stability Controller Design and Hardware-In-The-Loop Testing For A Road VehicleDocument18 pagesRobust Yaw Stability Controller Design and Hardware-In-The-Loop Testing For A Road VehicleBejai Alexander MathewNo ratings yet
- Investigation of Long Shaft Failure in John Deere 955 Grain Combine Harvester Under Static LoadDocument2 pagesInvestigation of Long Shaft Failure in John Deere 955 Grain Combine Harvester Under Static LoadmmanharNo ratings yet
- Designing Suspension for Terrain VehicleDocument6 pagesDesigning Suspension for Terrain VehicleSami Onur VuralNo ratings yet
- Design and fabrication of an all-terrain BAJA vehicleDocument8 pagesDesign and fabrication of an all-terrain BAJA vehicleaciddropsNo ratings yet
- John Deere 5075E 4WD Tractor Test ReportDocument4 pagesJohn Deere 5075E 4WD Tractor Test ReportSubhasis MishraNo ratings yet
- A 08695Document9 pagesA 08695Shamir NoorsumarNo ratings yet
- BAJA Design ReportDocument55 pagesBAJA Design ReportGauravNo ratings yet
- Disc Brake Assembly Analysis: INSTRUCTOR: Dr. Gonca Altuger-Genc MET-300Document42 pagesDisc Brake Assembly Analysis: INSTRUCTOR: Dr. Gonca Altuger-Genc MET-300PaulWiseNo ratings yet
- Operation and Maintenance Manual of Container Reach-StackerDocument65 pagesOperation and Maintenance Manual of Container Reach-StackerIng Fermín67% (3)
- GB Pant Engineering College - BAJA SAE India 2014 - DesignReportDocument8 pagesGB Pant Engineering College - BAJA SAE India 2014 - DesignReportvardaan510No ratings yet
- Modern Vehicle Braking and Dynamics SimulationDocument35 pagesModern Vehicle Braking and Dynamics SimulationFaizrul YusoffNo ratings yet
- 3 Wheel Electric Forklift Trucks 2,500-3,200 LB PDFDocument14 pages3 Wheel Electric Forklift Trucks 2,500-3,200 LB PDFForklift Systems IncorporatedNo ratings yet
- 2 67 1628858339 4ijmperdoct202144Document14 pages2 67 1628858339 4ijmperdoct202144TJPRC PublicationsNo ratings yet
- Final Paper IJLTETDocument7 pagesFinal Paper IJLTETaditendra1No ratings yet
- Electric Drive Study GDLSDocument396 pagesElectric Drive Study GDLSgeraldNo ratings yet
- Design of Machine Tool Gearboxes Driven by Double Speed Electric MotorsDocument10 pagesDesign of Machine Tool Gearboxes Driven by Double Speed Electric Motorsabrez100% (1)
- Engine PPT 1Document17 pagesEngine PPT 1Ankit KumarNo ratings yet
- Vehicle TechnologiesDocument16 pagesVehicle TechnologiesAhmet YaylıNo ratings yet
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsFrom EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsNo ratings yet
- Implast 2016 BrochureDocument1 pageImplast 2016 BrochureKuldeep SinghNo ratings yet
- Preview Only - Not For DistributionDocument2 pagesPreview Only - Not For DistributionKuldeep SinghNo ratings yet
- Speed enDocument2 pagesSpeed enKuldeep SinghNo ratings yet
- Harmati Varlaki 10Document10 pagesHarmati Varlaki 10Kuldeep SinghNo ratings yet
- Rebar Testing and Design VTT ReportDocument8 pagesRebar Testing and Design VTT ReportKuldeep SinghNo ratings yet
- Chemical Composition, Mechanical, Physical and Environmental Properties of SAE 1536, Steel Grades, Carbon SteelDocument1 pageChemical Composition, Mechanical, Physical and Environmental Properties of SAE 1536, Steel Grades, Carbon SteelKuldeep SinghNo ratings yet
- 356 Aluminum Sand Casting - A356 Aluminum Castings - Leitelt Brothers, IncDocument2 pages356 Aluminum Sand Casting - A356 Aluminum Castings - Leitelt Brothers, IncKuldeep SinghNo ratings yet
- Rebar Testing and Design VTT ReportDocument8 pagesRebar Testing and Design VTT ReportKuldeep SinghNo ratings yet
- NOTICE OF VEHICLE OWNERSHIP TRANSFERDocument1 pageNOTICE OF VEHICLE OWNERSHIP TRANSFERKrishna MahatoNo ratings yet
- Graphing With Excel - Superimposing GraphsDocument5 pagesGraphing With Excel - Superimposing GraphsKuldeep SinghNo ratings yet
- Is 3074 2005Document16 pagesIs 3074 2005Kuldeep SinghNo ratings yet
- 23esv 000489Document9 pages23esv 000489Kuldeep SinghNo ratings yet
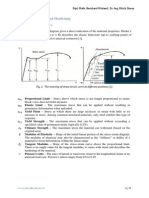
- Mmsm1 Handout PlasticityDocument3 pagesMmsm1 Handout PlasticityKuldeep SinghNo ratings yet
- Full Range Stress Strain CurvesDocument45 pagesFull Range Stress Strain CurvesLoffegutt100% (1)
- Is 3074 2005Document16 pagesIs 3074 2005Kuldeep SinghNo ratings yet
- HyperMesh 11.0 LS-DYNA TutorialsDocument106 pagesHyperMesh 11.0 LS-DYNA TutorialsKuldeep Singh50% (2)
- Analysis of Fatal Motorcycle Crashes: Crash Typing: (Accepted 5 April 1995)Document7 pagesAnalysis of Fatal Motorcycle Crashes: Crash Typing: (Accepted 5 April 1995)Kuldeep SinghNo ratings yet
- Fatigue and FractureDocument8 pagesFatigue and FractureImranKabirNo ratings yet
- Q J Mechanics Appl Math 1960 PUGSLEY 1 9Document9 pagesQ J Mechanics Appl Math 1960 PUGSLEY 1 9Kuldeep SinghNo ratings yet
- 2000 IcrashDocument7 pages2000 IcrashKuldeep SinghNo ratings yet
- Perception-Reaction Time PAGE 49Document11 pagesPerception-Reaction Time PAGE 49Kuldeep SinghNo ratings yet
- 2000 IcrashDocument7 pages2000 IcrashKuldeep SinghNo ratings yet
- 1999 01 0439 PhotogrammetryDocument16 pages1999 01 0439 PhotogrammetryKuldeep SinghNo ratings yet
- 4907 2Document28 pages4907 2Kuldeep SinghNo ratings yet
- Intersections: 1310.01 GeneralDocument44 pagesIntersections: 1310.01 GeneralKuldeep SinghNo ratings yet
- E 2005 M C D R Mcmis C F: Valuation of Issouri Rash ATA Eported To Rash ILEDocument35 pagesE 2005 M C D R Mcmis C F: Valuation of Issouri Rash ATA Eported To Rash ILEKuldeep SinghNo ratings yet
- Friction Brake TheoryDocument12 pagesFriction Brake TheoryamolkoushikNo ratings yet
- DYNA3DDocument37 pagesDYNA3DtoopchiNo ratings yet
- Development of Alertness-level-Dependent Headway Distance Warning SystemDocument6 pagesDevelopment of Alertness-level-Dependent Headway Distance Warning SystemKuldeep SinghNo ratings yet
- Intro - S4HANA - Using - Global - Bike - Slides - MM - en - v3.3 MODDocument45 pagesIntro - S4HANA - Using - Global - Bike - Slides - MM - en - v3.3 MODMrThedjalexNo ratings yet
- Ra 11223 PDFDocument34 pagesRa 11223 PDFNica SalazarNo ratings yet
- Fancy YarnsDocument7 pagesFancy Yarnsiriarn100% (1)
- Manufacturing Tech-1Document6 pagesManufacturing Tech-1Vikram Rao0% (1)
- As 2710-1984 Screw Gauges - VerificationDocument7 pagesAs 2710-1984 Screw Gauges - VerificationSAI Global - APACNo ratings yet
- Clinnic Panel Penag 2014Document8 pagesClinnic Panel Penag 2014Cikgu Mohd NoorNo ratings yet
- The Ideal Structure of ZZ (Alwis)Document8 pagesThe Ideal Structure of ZZ (Alwis)yacp16761No ratings yet
- Community Development A Critical Approach PDFDocument2 pagesCommunity Development A Critical Approach PDFNatasha50% (2)
- 2018 Diesel TOYOTA Jun11Document90 pages2018 Diesel TOYOTA Jun11eko sulistyo75% (4)
- Valentine Gifting - Accessories EditionDocument25 pagesValentine Gifting - Accessories EditionPriyanath PaulNo ratings yet
- STR File Varun 3Document61 pagesSTR File Varun 3Varun mendirattaNo ratings yet
- Mega Goal 4Document52 pagesMega Goal 4mahgoubkamel0% (1)
- EA Flora 1Document3 pagesEA Flora 1A. MagnoNo ratings yet
- Graphs & Charts SummariesDocument20 pagesGraphs & Charts SummariesMaj Ma Salvador-Bandiola100% (1)
- ZJJ 3Document23 pagesZJJ 3jananiwimukthiNo ratings yet
- Philosophy of Disciple Making PaperDocument5 pagesPhilosophy of Disciple Making Paperapi-665038631No ratings yet
- Assessing Student Learning OutcomesDocument20 pagesAssessing Student Learning Outcomesapi-619738021No ratings yet
- Makerwys - Exe Version 4.891: by Pete Dowson © 2019 InstructionsDocument11 pagesMakerwys - Exe Version 4.891: by Pete Dowson © 2019 InstructionsRafrol RamonNo ratings yet
- Westford University College readies flagship campus with new programsDocument20 pagesWestford University College readies flagship campus with new programsSaju JanardhananNo ratings yet
- Chapter-5 Contract ManagementDocument43 pagesChapter-5 Contract Managementprem kumarNo ratings yet
- Why Leaders Should Look in the “MirrorDocument4 pagesWhy Leaders Should Look in the “MirrorCaryl Baylon EstreraNo ratings yet
- What Are Your Observations or Generalizations On How Text/ and or Images Are Presented?Document2 pagesWhat Are Your Observations or Generalizations On How Text/ and or Images Are Presented?Darlene PanisaNo ratings yet
- معامل الاسفلتDocument32 pagesمعامل الاسفلتMohammed AbbasNo ratings yet
- Predictive Analytics: QM901.1x Prof U Dinesh Kumar, IIMBDocument36 pagesPredictive Analytics: QM901.1x Prof U Dinesh Kumar, IIMBVenkata Nelluri PmpNo ratings yet
- Math 2 Unit 9 - Probability: Lesson 1: "Sample Spaces, Subsets, and Basic Probability"Document87 pagesMath 2 Unit 9 - Probability: Lesson 1: "Sample Spaces, Subsets, and Basic Probability"Anonymous BUG9KZ3100% (1)
- BRKSPG-2904-2904 - Cisco Live Session - v2-CL PDFDocument182 pagesBRKSPG-2904-2904 - Cisco Live Session - v2-CL PDFMohamed SamirNo ratings yet
- Independence Day Resurgence ScriptDocument60 pagesIndependence Day Resurgence ScriptdavidNo ratings yet
- Defender 90 110 Workshop Manual 5 WiringDocument112 pagesDefender 90 110 Workshop Manual 5 WiringChris Woodhouse50% (2)
- 60Hz Axial-Fan Centrifugal-Fan AC EN (2009) PDFDocument136 pages60Hz Axial-Fan Centrifugal-Fan AC EN (2009) PDFRodrigo GonçalvesNo ratings yet
- Haier's Performance Management in Other CulturesDocument8 pagesHaier's Performance Management in Other CulturesSubhransu SahooNo ratings yet