Revised: August 27, 2014
ECE 624 - Homework # 1
Fall Semester 2014
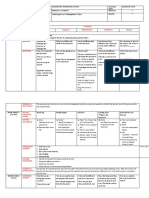
1. Consider the inverted pendulum on a cart in the following gure:
As indicated in the gure the full length of the pendulum is L
p
. For analysis, the pendulum can be
considered as a point mass m that is rotated with radius l
p
=
1
2
L
p
. The cart is the portion of the
vehicle with the pinion gears meshed with the tracks teeth. The mass of the cart is m
c
. On top of the
cart is a weight that has been added to connect the pendulum. The mass of this weight is m
w
. The
sum of these two masses is demoted by M. This is the mass that is displaced by the force that results
from the motors torque.
(a) Derive the nonlinear equation of motion for the inverted pendulum, including the rotational and
translational dynamics. Assume that friction and viscous damping are negligible. The input for
this task is the force F that results from the motor torque. The outputs are the pendulum angle
and the carts displacement x.
(b) Derive a linearized state space model for the inverted pendulum dynamics if the desired equilibrium
for the pendulum angle is = 0. The input is F, and the outputs are and x. Combine the
motor dynamics with the equation of the inverted pendulum to get the overall state space model.
Derive also the transfer functions from F to the pendulum angle , and the transfer function from
to the carts position x.
(c) Device an appropriate block diagram (closed-loop) of transfer functions so that the angle of the
beam and the position of the cart can be controlled. Just provide a reasonable block diagram (no
design analysis is required).
2. Let G(s) be
G(s) = K
s +
(s +)
2
.
Find K, and so that the steady state error of a unit step input is 0.1; damping ratio is 0.5; and
the natural frequency is
10.
3. Let G(s) be
G(s) =
K
s(s +a)
.
Given that G(s) is in a unity feedback control system, nd
(a) K and a so that the velocity constant K
v
is 1000 and the response has 20% overshoot.
(b) K and a to yield a 1% error in the steady state and 10% overshoot.
4. We reviewed the description of the characteristics of a transfer function (damping ratio, natural fre-
quency, etc) with respect to positions in the S-plane (for example, diagonal lines correspond to constant
damping ratio). However, the argument was provided only for 2nd order systems. Explain how can
you use this idea for higher order transfer function including zeros (Hint: refresh your mind on the
concept of dominant poles).
5. Let G(s) be
G(s) =
K
s(s
2
+ 4s + 1)
.
Given that G(s) is in a unity feedback control system,
(a) Plot the root loci for the system.
(b) Determine the value of K such that = 0.5 and determine all the closed loop poles.
(c) Which of the closed-loop poles is a higher order pole?
6. During ascent the automatic steering program aboard the space shuttle provides the interface between
low-rate processing and high-rate processing of ight control (steering in response of the commands).
The function performed is basically that of smoothing. A simplied representation of a maneuver
smoother linearized for coplanar maneuvers is below
Here
CB
(s) is the is the desired body angle sent to ight control after smoothing
(a) Sketch the root locus when the roots vary as a function of K
3
.
(b) Locate the closed-loop zeros.
(c) Repeat the previous items for for the root locus in terms of K
2
Hint: Suppose
T(s) =
KG(s)
1 + KD(s)G(s)
and that KD(s)G(s) =
K
(s+k1)(s+k2)
. Observe that
T(s) =
K
s
2
+ (k
1
+k
2
)s +k
1
k2 +K
.
Isolating k
1
T(s) =
K
s
2
+k2s+K
s
2
+k
2
s +K +k
1
(s +k2)
=
K
1 +k
1
(s+k2)
s
2
+k2s+K
.
Thus,
KD(s)G(s) = k
1
(s +k2)
s
2
+k
2
s +K
,
and one can use the exact same techniques to draw a root locus plot with respect to k
1
(k
2
and K are
considered xed).
7. Use any method you know to design a PD controller for a plant having transfer function
G(s) =
K
s(s + 5)(s + 15)
to reduce the settling time by 4 while continuing having 20% overshoot.
You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Peter Attia Measuring Cardiovascular Disease Risk and The Importance of ApoBDocument14 pagesPeter Attia Measuring Cardiovascular Disease Risk and The Importance of ApoBabhimanyu50% (2)
- Sal de CrosetatDocument3 pagesSal de CrosetatMădălina Pisău100% (1)
- UNIC Brochure English PDFDocument40 pagesUNIC Brochure English PDFOvirelance -Marius PascariuNo ratings yet
- SM 1201r9 UsxrayDocument500 pagesSM 1201r9 UsxrayMurat KaanNo ratings yet
- High Performance Techniques For Microsoft SQL Server PDFDocument307 pagesHigh Performance Techniques For Microsoft SQL Server PDFmaghnus100% (1)
- Homework Labs Lecture01Document9 pagesHomework Labs Lecture01Episode UnlockerNo ratings yet
- The Interpretive TheoryDocument15 pagesThe Interpretive TheorySomia Zergui100% (14)
- Open Die ForgingDocument7 pagesOpen Die ForgingCharanjeet Singh0% (1)
- RENAULT Quality PlanningDocument20 pagesRENAULT Quality PlanningEhsan ArbabtaftiNo ratings yet
- Confined SpacesDocument27 pagesConfined SpacesDivya RastogiNo ratings yet
- Citect V7.0 Error Codes PDFDocument13 pagesCitect V7.0 Error Codes PDFWahyu PrakosoNo ratings yet
- Sirisha Kurakula G00831237 ProjectDocument12 pagesSirisha Kurakula G00831237 ProjectSirisha Kurakula0% (1)
- Assertions RecoveredDocument3 pagesAssertions RecoveredAbdul GafurNo ratings yet
- Java Execption HandlingDocument13 pagesJava Execption HandlingSirisha KurakulaNo ratings yet
- OperatorsDocument13 pagesOperatorsPriyansh NigamNo ratings yet
- Assertions RecoveredDocument3 pagesAssertions RecoveredAbdul GafurNo ratings yet
- SUN Certifications JavaScjpDumps DetailsDocument15 pagesSUN Certifications JavaScjpDumps DetailsAbdul GafurNo ratings yet
- Multi ThreadingDocument31 pagesMulti Threadinglionelmessi123No ratings yet
- Java Language Fundamentals.Document11 pagesJava Language Fundamentals.Sirisha KurakulaNo ratings yet
- Object-Oriented Programming (Oops) : JavascjpdumpsDocument38 pagesObject-Oriented Programming (Oops) : Javascjpdumpsapurva123r4No ratings yet
- Siesmic Signal Processing ThesisDocument64 pagesSiesmic Signal Processing ThesisSirisha KurakulaNo ratings yet
- Adaptive Noise Filter Cancellaton VHDL CodeDocument5 pagesAdaptive Noise Filter Cancellaton VHDL CodeSirisha Kurakula100% (1)
- ADSP-21060 SHARC DSP Memory, Registers & Instruction PipeliningDocument20 pagesADSP-21060 SHARC DSP Memory, Registers & Instruction PipeliningSirisha KurakulaNo ratings yet
- Edible Antibiotics in Food CropDocument6 pagesEdible Antibiotics in Food CropSirisha Kurakula100% (1)
- AIESEC - Proposal Corporate (Updated)Document6 pagesAIESEC - Proposal Corporate (Updated)Sirisha KurakulaNo ratings yet
- Annual - Report.2009 10Document65 pagesAnnual - Report.2009 10Sirisha KurakulaNo ratings yet
- Midterm Exam Shuffled BasisDocument5 pagesMidterm Exam Shuffled BasisJohnNo ratings yet
- SVCE Seminar Report Format (FINAL)Document6 pagesSVCE Seminar Report Format (FINAL)Vinod KumarNo ratings yet
- Atht Model Ques 2017Document1 pageAtht Model Ques 2017Jeyakumar VenugopalNo ratings yet
- CE 205 - Analyzing Hydrographs and Deriving Unit HydrographsDocument17 pagesCE 205 - Analyzing Hydrographs and Deriving Unit HydrographsUmange RanasingheNo ratings yet
- ZF AVS Automatic Gearbox Manual PDFDocument67 pagesZF AVS Automatic Gearbox Manual PDFDardan HusiNo ratings yet
- AtmegaDocument22 pagesAtmegaMUKILANNo ratings yet
- Module 3 - Data and Database ManagementDocument11 pagesModule 3 - Data and Database ManagementDarrilyn VillalunaNo ratings yet
- KTG Week 1Document22 pagesKTG Week 1Rebecca Soriano SantosNo ratings yet
- SE Unit - 1Document30 pagesSE Unit - 1Sanketh KanuguNo ratings yet
- 20-SDMS-02 Overhead Line Accessories PDFDocument102 pages20-SDMS-02 Overhead Line Accessories PDFMehdi SalahNo ratings yet
- 11 - Biennial - Form/3 Component Uphole Survey For Estimation of SHDocument5 pages11 - Biennial - Form/3 Component Uphole Survey For Estimation of SHVishal PandeyNo ratings yet
- FFA Furfural Fire and Health HazardsDocument2 pagesFFA Furfural Fire and Health HazardsYuga Pria PungkasanNo ratings yet
- 1 11 S Kinetics StudentVersionDocument14 pages1 11 S Kinetics StudentVersionMuhammad ilhamNo ratings yet
- M4 4 Synthetic Surface Modeling Bezier and Bspline PatchesDocument40 pagesM4 4 Synthetic Surface Modeling Bezier and Bspline PatchesNANDULA GOUTHAM SAINo ratings yet
- DIN-Rail AC Current Transducer 0.25% AccuracyDocument3 pagesDIN-Rail AC Current Transducer 0.25% AccuracyjoseluisbeitoNo ratings yet
- Emc VNX Vnxe3300: Installation GuideDocument28 pagesEmc VNX Vnxe3300: Installation GuideAnkit JoshiNo ratings yet
- How To Import Excel Into LabviewDocument3 pagesHow To Import Excel Into LabviewDan JohnsonNo ratings yet
- Optical VibrationDocument6 pagesOptical VibrationKarthick VelayuthamNo ratings yet
- Cagayan State University: Republic of The PhilippinesDocument21 pagesCagayan State University: Republic of The PhilippinesblessaNo ratings yet