You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- HOLOPHANE Lighting Fundamentals HL 862Document24 pagesHOLOPHANE Lighting Fundamentals HL 862georgel1980No ratings yet
- Electrical Protection HandbookDocument124 pagesElectrical Protection Handbookgeorgel1980No ratings yet
- Component Protection For Electrical SystemsDocument32 pagesComponent Protection For Electrical Systemsgeorgel1980No ratings yet
- D-Fundamentals of Motor ControlDocument60 pagesD-Fundamentals of Motor Controlgeorgel1980No ratings yet
- 191 Fuzzy LogicDocument32 pages191 Fuzzy Logicgeorgel1980No ratings yet
- 178-The IT Earthing SystemDocument31 pages178-The IT Earthing Systemgeorgel1980No ratings yet
- User S Manual : Line-Interactive Network UPSDocument13 pagesUser S Manual : Line-Interactive Network UPSvhanzuNo ratings yet
- IL300Document11 pagesIL300Sreerag Kunnathu SugathanNo ratings yet
- 3201 Service Manual PDFDocument96 pages3201 Service Manual PDFJuan Leonardo Riaño100% (1)
- Sport & Fitness User Manual MultiDocument185 pagesSport & Fitness User Manual MultibeoNo ratings yet
- PS-1250 (Batería 12 V) - DatasheetDocument2 pagesPS-1250 (Batería 12 V) - DatasheetnandosinternetNo ratings yet
- Problems 6 Circuit WileyDocument29 pagesProblems 6 Circuit WileyHelloWorldNo ratings yet
- Boq of MEP For FactoryDocument37 pagesBoq of MEP For FactoryLi LiuNo ratings yet
- NX200Document102 pagesNX200FABIANNo ratings yet
- PAT America, Inc.: Operator'S / Service ManualDocument42 pagesPAT America, Inc.: Operator'S / Service Manualgrineldo84No ratings yet
- ECD Lab 12 - Darlington840Document7 pagesECD Lab 12 - Darlington840Syed WasiNo ratings yet
- Aeolian Vibration: Its Affects and Remedy On Transmission LinesDocument10 pagesAeolian Vibration: Its Affects and Remedy On Transmission LinesAsaduzzaman Khan0% (1)
- ASTM D149-2009 (2013) - 2500 DIelectricDocument3 pagesASTM D149-2009 (2013) - 2500 DIelectricmateoNo ratings yet
- Trunking Radio System TETRADocument21 pagesTrunking Radio System TETRAMihsah Exttreme50% (2)
- Exp 5 Frequency Response of Couple TankDocument23 pagesExp 5 Frequency Response of Couple TankSaravanan ElangovanNo ratings yet
- Errores HitachiDocument4 pagesErrores HitachiToni Pérez Lago50% (2)
- Cellphone Service Training: CommonDocument5 pagesCellphone Service Training: CommonpkrajniNo ratings yet
- Ficha Técnica Control de Alarmas y Dispositivos de EmergenciaDocument33 pagesFicha Técnica Control de Alarmas y Dispositivos de EmergenciaLuis Garcia MartinezNo ratings yet
- خطوات عمل جداول الحسابات Panel SchedulesDocument6 pagesخطوات عمل جداول الحسابات Panel SchedulesMOAZ ASHRAFNo ratings yet
- MCBDocument6 pagesMCBjaveeed0401No ratings yet
- Reading Transistor MarkingsDocument2 pagesReading Transistor Markingsthomas.vivet6396No ratings yet
- CHP050 Substation Automation Systems - Day 2 - Bay Control Solutions Rev.1Document71 pagesCHP050 Substation Automation Systems - Day 2 - Bay Control Solutions Rev.1castrojpNo ratings yet
- Mst-1 Paper - BSC - Cs - II YearDocument2 pagesMst-1 Paper - BSC - Cs - II YearPrabhat PandeyNo ratings yet
- Electrostatic 1 (Mcq. For Board)Document9 pagesElectrostatic 1 (Mcq. For Board)Sheetal meenaNo ratings yet
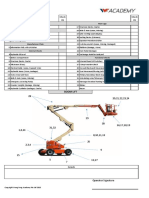
- Boomlift Inspection ChecklistDocument1 pageBoomlift Inspection ChecklistdennisjuntakNo ratings yet
- Clevo N170SD - Service ManualDocument110 pagesClevo N170SD - Service ManualCarlos José FariaNo ratings yet
- T500 DatasheetDocument436 pagesT500 Datasheetbraxton_millerNo ratings yet
- 056-093 74xx MKI To 74xx MKII ConversionDocument2 pages056-093 74xx MKI To 74xx MKII ConversiongilizaniniNo ratings yet
- Terminal Diagram - DigitalDocument2 pagesTerminal Diagram - DigitalkratosNo ratings yet
- Sirius 3 ManualDocument22 pagesSirius 3 Manual'Egemen KayaNo ratings yet
- Manual de Partes Bard WADocument14 pagesManual de Partes Bard WAFausto CompeanNo ratings yet