You might also like
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Semiconductor Application Note: Prepared By: Garth Nash Applications EngineeringDocument12 pagesSemiconductor Application Note: Prepared By: Garth Nash Applications EngineeringefddfdsdsaNo ratings yet
- Phase-Locked Loop: Hrpota June 6, 2005Document9 pagesPhase-Locked Loop: Hrpota June 6, 2005Parameswararao BillaNo ratings yet
- AN535 Phase Lock Loop Design FundamentalsDocument13 pagesAN535 Phase Lock Loop Design FundamentalsfahkingmoronNo ratings yet
- Effects Impulsive Loop: of Noise Phase-Locked FM DemodulatorDocument7 pagesEffects Impulsive Loop: of Noise Phase-Locked FM DemodulatorVivek RoyNo ratings yet
- Circuit Analysis in S-DomainDocument22 pagesCircuit Analysis in S-Domainshreyas_stinsonNo ratings yet
- PLL Intro 594a s05Document46 pagesPLL Intro 594a s05jaberyemeniNo ratings yet
- Laplace TransformDocument122 pagesLaplace TransformbalavceNo ratings yet
- Phase Locked Loop Design FundamentalsDocument22 pagesPhase Locked Loop Design Fundamentalsptt3iNo ratings yet
- PLL TutorialDocument46 pagesPLL Tutorialnucleur_13No ratings yet
- Laplace TransformDocument11 pagesLaplace TransformDerrick Maatla MoadiNo ratings yet
- Question Bank of Network Analysis and Synthesis UNIT-1 and UNIT-2Document9 pagesQuestion Bank of Network Analysis and Synthesis UNIT-1 and UNIT-2PrakharGupta100% (1)
- MSC Digital Power ElectronicsDocument33 pagesMSC Digital Power ElectronicsashammoudaNo ratings yet
- Lab 5: Digital Phase Locked Loop (PLL) : Matlab Part: ObjectiveDocument11 pagesLab 5: Digital Phase Locked Loop (PLL) : Matlab Part: ObjectiveThế Anh NguyễnNo ratings yet
- Analog Communication Unit6-PNDocument18 pagesAnalog Communication Unit6-PN09ce13fNo ratings yet
- MITRES 6-010S13 Chap03 PDFDocument47 pagesMITRES 6-010S13 Chap03 PDFSrinyantu ChatterjeeNo ratings yet
- 1st Order CircuitsDocument14 pages1st Order Circuitsmeghraj01No ratings yet
- Process Control PresentaitionDocument18 pagesProcess Control PresentaitionMahbub Hasan RownokNo ratings yet
- Fifth&Sixth ProcedureDocument11 pagesFifth&Sixth ProcedureAmir RabbaniNo ratings yet
- Syn Gen Transient AnalysisDocument17 pagesSyn Gen Transient AnalysisNilush JayawardanaNo ratings yet
- Application of Laplace TransformDocument35 pagesApplication of Laplace TransformSingappuli100% (1)
- Trajectory GenerationDocument39 pagesTrajectory GenerationHo Lam HeungNo ratings yet
- IAT SolutionsDocument13 pagesIAT Solutionsjay mehtaNo ratings yet
- Phase Locked Loop: DT T M K TDocument3 pagesPhase Locked Loop: DT T M K ThimeshemraanNo ratings yet
- Modeling & Simulation of Hysteresis Current Controlled Inverters Using MATLABDocument26 pagesModeling & Simulation of Hysteresis Current Controlled Inverters Using MATLABRajesh NayakNo ratings yet
- Chapter 9: Synchronization: Shanghai Jiao Tong University 11.2011Document57 pagesChapter 9: Synchronization: Shanghai Jiao Tong University 11.2011Shi SunNo ratings yet
- Transfer FunctionsDocument4 pagesTransfer FunctionsAhmed HamoudaNo ratings yet
- Taylor Series For Inverse LaplaceDocument3 pagesTaylor Series For Inverse LaplaceGustavo MiottoNo ratings yet
- 808PET22 Eliminate Crossover Frequency Guesswork PDFDocument6 pages808PET22 Eliminate Crossover Frequency Guesswork PDFRamin DavoodiNo ratings yet
- Hashemian Hashem M 201105 PHD DatatablesDocument46 pagesHashemian Hashem M 201105 PHD DatatablesSebastián CandeiasNo ratings yet
- Chapter 6 - Time ResponseDocument88 pagesChapter 6 - Time Responsevenosyah devanNo ratings yet
- Digital Control System - CompressedDocument18 pagesDigital Control System - CompressedSukhpal SinghNo ratings yet
- Synchronization: Digital Communication Chapter 6 & 7Document23 pagesSynchronization: Digital Communication Chapter 6 & 7문상미No ratings yet
- Topic 4. Frequency ResponseDocument9 pagesTopic 4. Frequency ResponseFadzai FunguraNo ratings yet
- Derivation of Transient Response in Series R-L Circuit With Sinusoidal ExcitationDocument7 pagesDerivation of Transient Response in Series R-L Circuit With Sinusoidal ExcitationmanimaranNo ratings yet
- 1977 - Tal - Synchronization Characteristics of Controllable OscillatorsDocument7 pages1977 - Tal - Synchronization Characteristics of Controllable OscillatorsluizomarNo ratings yet
- EE206 Control Systems Tutorial - 18Document5 pagesEE206 Control Systems Tutorial - 18Haelu KuNo ratings yet
- LCS 1st Lab ManualDocument14 pagesLCS 1st Lab ManualWaleed QureshiNo ratings yet
- Psoc® 1, Psoc 3, and Psoc 5 - Single-Pole Infinite Impulse Response (Iir) FiltersDocument11 pagesPsoc® 1, Psoc 3, and Psoc 5 - Single-Pole Infinite Impulse Response (Iir) FiltersrednejetNo ratings yet
- Laplace 2Document46 pagesLaplace 2smoothing1No ratings yet
- Lecture #35: Analysis of Electrical Networks With Initial ConditionsDocument13 pagesLecture #35: Analysis of Electrical Networks With Initial ConditionsSaneesh KarayilNo ratings yet
- Lab:5 To Plot and Analyze The Responses of First Order Systems For Various Test Signals. Misno: Name: Date of Submission: Marks Out of 10: SignatureDocument9 pagesLab:5 To Plot and Analyze The Responses of First Order Systems For Various Test Signals. Misno: Name: Date of Submission: Marks Out of 10: SignatureKishor BhamareNo ratings yet
- Software Phase Locked LoopDocument7 pagesSoftware Phase Locked LoopBinyam YohannesNo ratings yet
- Objective: Design A Practical Integrator Circuit Using Common OP AMP Circuits. TestDocument10 pagesObjective: Design A Practical Integrator Circuit Using Common OP AMP Circuits. TestVinoth KumarNo ratings yet
- Chapter 3 Time Domain Analysis of ControDocument22 pagesChapter 3 Time Domain Analysis of ControKiranKumarNo ratings yet
- Lect3 Time ResponseDocument47 pagesLect3 Time ResponseEyad IbrahimNo ratings yet
- The Circuit in Fig. (A) Is Equivalent To The One Shown in Fig. (B)Document15 pagesThe Circuit in Fig. (A) Is Equivalent To The One Shown in Fig. (B)Ameer ShNo ratings yet
- Digital Control Systems Unit IDocument18 pagesDigital Control Systems Unit Iyanith kumarNo ratings yet
- Synchronization: Shanghai Jiao Tong UniversityDocument59 pagesSynchronization: Shanghai Jiao Tong UniversityKoh Shao Ning JoelNo ratings yet
- Experiment 106. Stabilisation of A Rotary Inverted Pendulum 1 ObjectiveDocument11 pagesExperiment 106. Stabilisation of A Rotary Inverted Pendulum 1 ObjectiveAmine Y. AlamiNo ratings yet
- Ee366 Chap 5 2Document28 pagesEe366 Chap 5 2Michael Adu-boahenNo ratings yet
- After Mid Sem Assignment-5Document4 pagesAfter Mid Sem Assignment-5Akash FuryNo ratings yet
- Practical Feedback Loop Design Considerations For Switched Mode Power SuppliesDocument14 pagesPractical Feedback Loop Design Considerations For Switched Mode Power SuppliesDiego PhillipeNo ratings yet
- Mathematical ModellingDocument36 pagesMathematical ModellingMohd Fazli100% (2)
- 3 Ece - PDC Unit - I PDFDocument64 pages3 Ece - PDC Unit - I PDFSree VamsiNo ratings yet
- Precision Digital Sine-Wave Generation With The TMS32010: Application Report: Spra007Document23 pagesPrecision Digital Sine-Wave Generation With The TMS32010: Application Report: Spra007naveen reddyNo ratings yet
- Implementation of An FSK Modem Using The TMS320C17: Application Report: Spra080Document62 pagesImplementation of An FSK Modem Using The TMS320C17: Application Report: Spra080naveen reddyNo ratings yet
- Creating A Two Channel Sine Wave Generator Using The TMS320F240 EVMDocument34 pagesCreating A Two Channel Sine Wave Generator Using The TMS320F240 EVMnaveen reddyNo ratings yet
- Interpolation in Microcontroller Based Instrumentation and Control ProjectsDocument4 pagesInterpolation in Microcontroller Based Instrumentation and Control Projectsnaveen reddyNo ratings yet
- Assignment Operators: Op Era Tor Meaning / % + - &Document1 pageAssignment Operators: Op Era Tor Meaning / % + - &naveen reddyNo ratings yet
- One Piece Design W/ Screw Clamp TerminationDocument1 pageOne Piece Design W/ Screw Clamp Terminationnaveen reddyNo ratings yet
- Pasquale Arpaia, Pasquale Cimmino, Fabrizio Clemente, Carmine RomanucciDocument5 pagesPasquale Arpaia, Pasquale Cimmino, Fabrizio Clemente, Carmine Romanuccinaveen reddyNo ratings yet
- Life Extension Through Charge Equalization of Lead-Acid BatteriesDocument8 pagesLife Extension Through Charge Equalization of Lead-Acid Batteriesnaveen reddyNo ratings yet
- Assignment OperatorsDocument1 pageAssignment Operatorsnaveen reddyNo ratings yet
- 137Document6 pages137naveen reddyNo ratings yet
- Table 1: Coil Calculations For High Voltage Power SupplyDocument6 pagesTable 1: Coil Calculations For High Voltage Power Supplynaveen reddyNo ratings yet
- A Note From Dave Miller (AA4DF) and Jill Bryant atDocument47 pagesA Note From Dave Miller (AA4DF) and Jill Bryant atSiska SyihabNo ratings yet
- CMT2210LCW DatasheetDocument18 pagesCMT2210LCW DatasheetLong Trần NhậtNo ratings yet
- PLL Designguide: August 2005Document40 pagesPLL Designguide: August 2005Summer KoNo ratings yet
- Design of A Wide Tuning Range CMOS 130nm Quadrature VCO For Cell Impedance SpectrosDocument8 pagesDesign of A Wide Tuning Range CMOS 130nm Quadrature VCO For Cell Impedance SpectrospvegaNo ratings yet
- Ring Oscillator - Wikipedia, The Free EncyclopediaDocument3 pagesRing Oscillator - Wikipedia, The Free EncyclopediaSunil M. PaiNo ratings yet
- Superstar 3900EDocument34 pagesSuperstar 3900EsoehtNo ratings yet
- Microwave ProjectsDocument195 pagesMicrowave Projectssaurav120683% (6)
- Search With Metal DetectorsDocument33 pagesSearch With Metal DetectorsDCLXVINo ratings yet
- DTP 28B1Document76 pagesDTP 28B1speedyeduNo ratings yet
- Floyd OscillatorDocument13 pagesFloyd Oscillatorjeanne pauline cruzNo ratings yet
- QRP 2m FM Transceiver Project PDFDocument38 pagesQRP 2m FM Transceiver Project PDFblueword66No ratings yet
- A CD 2206Document20 pagesA CD 2206MUHAMMAD SISWANTORONo ratings yet
- Most ImportantDocument65 pagesMost Importantno_matters_meNo ratings yet
- Radio420X User's GuideDocument50 pagesRadio420X User's GuideRudheesh RkNo ratings yet
- STM 32 H 755 ZiDocument256 pagesSTM 32 H 755 ZiAbraham GutierrezNo ratings yet
- Vertex VX-2100Document22 pagesVertex VX-2100Brenton SalassiNo ratings yet
- PRC138 Operator PDFDocument470 pagesPRC138 Operator PDFfalcom2100% (1)
- Crystal Oscillator Specification: OCXO 143-1001Document3 pagesCrystal Oscillator Specification: OCXO 143-1001snewton6752No ratings yet
- Home Garden Elektor 303 DIY Project CircuitsDocument77 pagesHome Garden Elektor 303 DIY Project CircuitsTurkogluNo ratings yet
- All India Radio Vocational Industrial Training ReportDocument52 pagesAll India Radio Vocational Industrial Training ReportSujeet Haldkar50% (4)
- Timing Solutions For Xilinx FpgasDocument5 pagesTiming Solutions For Xilinx FpgasMohammad JafariNo ratings yet
- Lm331 Voltaje A FrecuenciaDocument24 pagesLm331 Voltaje A FrecuenciaLeguel LNo ratings yet
- Frequency ModulationDocument76 pagesFrequency ModulationSamoo MustafaNo ratings yet
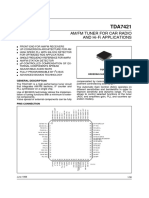
- Am/Fm Tuner For Car Radio and Hi-Fi Applications: General DescriptionDocument38 pagesAm/Fm Tuner For Car Radio and Hi-Fi Applications: General DescriptionMartin MartinNo ratings yet
- (DOC) Design and Construction of Wireless Public Address System Report - Esseh Andy - Academia - EduDocument22 pages(DOC) Design and Construction of Wireless Public Address System Report - Esseh Andy - Academia - EduAYEDITAN AYOMIDENo ratings yet
- Music Synthesizers - AMODAC - Delton T HortonDocument349 pagesMusic Synthesizers - AMODAC - Delton T HortonAndre50% (2)
- Voltage Controlled OscillatorDocument7 pagesVoltage Controlled Oscillatorjonesy5000No ratings yet
- F4001 Service ManualDocument32 pagesF4001 Service ManualTom MotorolaNo ratings yet
- Analog Devices 2014 RFIC Selection GuideDocument40 pagesAnalog Devices 2014 RFIC Selection Guidespeedybits100% (2)
- ELT50 ELR50: User and Technical ManualDocument96 pagesELT50 ELR50: User and Technical ManualRorro ProproNo ratings yet