You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument1 pagePlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument1 pagePlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- Evolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemDocument7 pagesEvolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemSatishReddyNo ratings yet
- Journal Article Without DOIDocument2 pagesJournal Article Without DOISatishReddyNo ratings yet
- 04 Sensors AircraftDocument3 pages04 Sensors AircraftSatishReddyNo ratings yet
- Approved Course Mto TRV PDFDocument1 pageApproved Course Mto TRV PDFSatishReddyNo ratings yet
- Dgca Module 11 Part 06Document19 pagesDgca Module 11 Part 06SatishReddyNo ratings yet
- M11 May 2018Document8 pagesM11 May 2018SatishReddyNo ratings yet
- Task 46!21!00-740-001-A Bite Test of The AtimsDocument4 pagesTask 46!21!00-740-001-A Bite Test of The AtimsSatishReddy100% (1)
- ATR 72-212A 01 of 2016Document1 pageATR 72-212A 01 of 2016SatishReddyNo ratings yet
- Module 3 QsDocument44 pagesModule 3 QsSatishReddyNo ratings yet
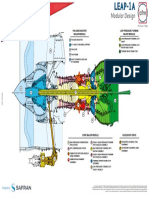
- LEAP-1A A3 Modular Design Rev2.0Document1 pageLEAP-1A A3 Modular Design Rev2.0SatishReddy100% (4)
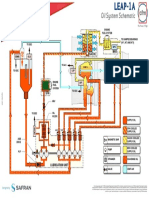
- LEAP-1A A3 79-Oil System Rev2.0Document1 pageLEAP-1A A3 79-Oil System Rev2.0SatishReddy100% (2)
- Task 46!21!00-710-002-A VHF 3 Link Test of The AtsuDocument8 pagesTask 46!21!00-710-002-A VHF 3 Link Test of The AtsuSatishReddyNo ratings yet
- Dissertation BitsDocument21 pagesDissertation BitsSatishReddyNo ratings yet
- ProjectDocument4 pagesProjectSatishReddyNo ratings yet
- TASK 12!13!79-610-011-A Check Oil Level and ReplenishDocument6 pagesTASK 12!13!79-610-011-A Check Oil Level and ReplenishSatishReddyNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Noli Me Tangere CharactersDocument4 pagesNoli Me Tangere CharactersDiemNo ratings yet
- Marketing Plan For Optimo InternationalDocument47 pagesMarketing Plan For Optimo InternationalNiña Alfonso100% (1)
- Transition Case StudyDocument4 pagesTransition Case StudyNobert BulindaNo ratings yet
- Script - Macbeth A La MafiosiDocument27 pagesScript - Macbeth A La MafiosiMohd Afiq Mat RazaiNo ratings yet
- Call Me by Your Name-SemioticsDocument2 pagesCall Me by Your Name-SemioticsJoevic FranciaNo ratings yet
- "Article Critique" Walden University Methods For Evidence-Based Practice, Nursing 8200 January 28, 2019Document5 pages"Article Critique" Walden University Methods For Evidence-Based Practice, Nursing 8200 January 28, 2019Elonna AnneNo ratings yet
- Unit5 v1.0022101210Document52 pagesUnit5 v1.0022101210Lily KkNo ratings yet
- Culture and Creative Industries in TanzaniaDocument70 pagesCulture and Creative Industries in TanzaniaYana ArsyadiNo ratings yet
- TransModeler BrochureDocument12 pagesTransModeler BrochureedgarabrahamNo ratings yet
- Position Paper On Sexual Orientation, Gender Identity and Expression (SOGIE)Document3 pagesPosition Paper On Sexual Orientation, Gender Identity and Expression (SOGIE)SYDNEY MARASIGANNo ratings yet
- 007-Student Council NominationDocument2 pages007-Student Council NominationrimsnibmNo ratings yet
- Unit 9:: What Did You See at The Zoo?Document11 pagesUnit 9:: What Did You See at The Zoo?ARiFin MoHaMedNo ratings yet
- Introduction To Financial Management: Topic 1Document85 pagesIntroduction To Financial Management: Topic 1靳雪娇No ratings yet
- Who Di 31-4 Atc-DddDocument6 pagesWho Di 31-4 Atc-DddHenderika Lado MauNo ratings yet
- Draft Cavite MutinyDocument1 pageDraft Cavite MutinyaminoacidNo ratings yet
- (154 Marks) : (1 Mark)Document40 pages(154 Marks) : (1 Mark)Manav NairNo ratings yet
- Hayat e Imam Abu Hanifa by Sheikh Muhammad Abu ZohraDocument383 pagesHayat e Imam Abu Hanifa by Sheikh Muhammad Abu ZohraShahood AhmedNo ratings yet
- A0 Unit1 Lesson3A PP GB AmbDocument9 pagesA0 Unit1 Lesson3A PP GB AmbMasterkolo KamisNo ratings yet
- Filters SlideDocument17 pagesFilters SlideEmmanuel OkoroNo ratings yet
- Untitled PresentationDocument6 pagesUntitled PresentationWayne ChenNo ratings yet
- Technology in EducationDocument3 pagesTechnology in EducationDinesh MadhavanNo ratings yet
- Adeyinka Wulemat Olarinmoye - The Images of Women in Yoruban Folktales PDFDocument12 pagesAdeyinka Wulemat Olarinmoye - The Images of Women in Yoruban Folktales PDFAngel SánchezNo ratings yet
- News StoryDocument1 pageNews StoryRic Anthony LayasanNo ratings yet
- Notes 1Document30 pagesNotes 1Antal TóthNo ratings yet
- NIA Foundation PLI Proposal Template (Repaired)Document23 pagesNIA Foundation PLI Proposal Template (Repaired)lama dasuNo ratings yet
- Derivative Analysis HW1Document3 pagesDerivative Analysis HW1RahulSatijaNo ratings yet
- Biomol LabDocument12 pagesBiomol LabElizabeth BacarNo ratings yet
- Liquid Holdup in Large-Diameter Horizontal Multiphase PipelinesDocument8 pagesLiquid Holdup in Large-Diameter Horizontal Multiphase PipelinessaifoaNo ratings yet
- MATH3161 MATH5165 T1 2023 OutlineDocument10 pagesMATH3161 MATH5165 T1 2023 OutlineDouglusNo ratings yet
- Delta Robot KinematicsDocument11 pagesDelta Robot KinematicssekinNo ratings yet