You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Poisoned NeedleDocument147 pagesPoisoned NeedleMark Cooper100% (3)
- CRM McDonalds ScribdDocument9 pagesCRM McDonalds ScribdArun SanalNo ratings yet
- Citizen's 8651 Manual PDFDocument16 pagesCitizen's 8651 Manual PDFtfriebusNo ratings yet
- Sedation and Analgesia in Critically Ill Neurologic PatientsDocument24 pagesSedation and Analgesia in Critically Ill Neurologic PatientsrazaksoedNo ratings yet
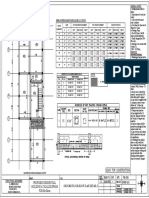
- G.f.roof Beam & Slab DetailDocument1 pageG.f.roof Beam & Slab Detailahmad anasNo ratings yet
- Summary Scholten's GroupsDocument8 pagesSummary Scholten's GroupsLily Samardzic-Rafik100% (4)
- Readers Digest November 2021 PDF RD 2021 PDF EnglishDocument172 pagesReaders Digest November 2021 PDF RD 2021 PDF EnglishIslam Gold100% (1)
- Quinta RuedaDocument20 pagesQuinta RuedaArturo RengifoNo ratings yet
- Weekly Meal Prep GuideDocument7 pagesWeekly Meal Prep Guideandrew.johnson3112No ratings yet
- Ecg Quick Guide PDFDocument7 pagesEcg Quick Guide PDFansarijavedNo ratings yet
- Erich FrommDocument2 pagesErich FrommTina NavarroNo ratings yet
- Photoperiodism Powerpoint EduDocument12 pagesPhotoperiodism Powerpoint EduAlabi FauziatBulalaNo ratings yet
- CH 13 RNA and Protein SynthesisDocument12 pagesCH 13 RNA and Protein SynthesisHannah50% (2)
- Installation Manual (DH84309201) - 07Document24 pagesInstallation Manual (DH84309201) - 07mquaiottiNo ratings yet
- Mobil Delvac 1 ESP 5W-40Document3 pagesMobil Delvac 1 ESP 5W-40RachitNo ratings yet
- Fomula Spreadsheet (WACC and NPV)Document7 pagesFomula Spreadsheet (WACC and NPV)vaishusonu90No ratings yet
- Grundfos Data Booklet MMSrewindablesubmersiblemotorsandaccessoriesDocument52 pagesGrundfos Data Booklet MMSrewindablesubmersiblemotorsandaccessoriesRashida MajeedNo ratings yet
- Earth As A PlanetDocument60 pagesEarth As A PlanetR AmravatiwalaNo ratings yet
- Management of Developing DentitionDocument51 pagesManagement of Developing Dentitionahmed alshaariNo ratings yet
- Test Questions For Oncologic DisordersDocument6 pagesTest Questions For Oncologic Disorderspatzie100% (1)
- HEYER VizOR - Product List - 1015Document7 pagesHEYER VizOR - Product List - 1015kalandorka92No ratings yet
- Denagard-CTC US Knowledge ReportDocument4 pagesDenagard-CTC US Knowledge Reportnick224No ratings yet
- Traditional vs. Enterprise Risk Management - How Do They DifferDocument4 pagesTraditional vs. Enterprise Risk Management - How Do They DifferJaveed A. KhanNo ratings yet
- Laughter, It Is Good For YouDocument2 pagesLaughter, It Is Good For YouClaire B.L.No ratings yet
- Kern County Sues Governor Gavin NewsomDocument3 pagesKern County Sues Governor Gavin NewsomAnthony Wright100% (1)
- Science 9-Quarter 2-Module-3Document28 pagesScience 9-Quarter 2-Module-3Mon DyNo ratings yet
- Snap Bore Ring PDFDocument8 pagesSnap Bore Ring PDFlaaliNo ratings yet
- Data Performance 2Document148 pagesData Performance 2Ibnu Abdillah MuhammadNo ratings yet
- B65a RRH2x40-4R UHGC SPDocument71 pagesB65a RRH2x40-4R UHGC SPNicolás RuedaNo ratings yet
- CampingDocument25 pagesCampingChristine May SusanaNo ratings yet