You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Ac Servo MotorDocument14 pagesAc Servo MotorJeyanthNo ratings yet
- Data Structures and Algorithms AssignmentDocument25 pagesData Structures and Algorithms Assignmentعلی احمد100% (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Experiment No 5 The DC Series MotorDocument6 pagesExperiment No 5 The DC Series MotorMadel Roque50% (2)
- Study of Characteristics of Three Phase Induction MotorDocument32 pagesStudy of Characteristics of Three Phase Induction MotorMohamed Omer Al Hadi100% (2)
- A705F Schematic Circuit Diagram HALABTECHDocument11 pagesA705F Schematic Circuit Diagram HALABTECHbcscneg0% (1)
- Lab 3Document7 pagesLab 3jisteeleNo ratings yet
- Electrical Machines-I Lab ManualDocument24 pagesElectrical Machines-I Lab Manualankur_sharma_95No ratings yet
- Almugea or Proper FaceDocument5 pagesAlmugea or Proper FaceValentin BadeaNo ratings yet
- Blocked Rotor TestDocument11 pagesBlocked Rotor TestIjabi100% (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Lab 3 Squirrel Cage Induction Machine-1Document8 pagesLab 3 Squirrel Cage Induction Machine-1max100% (1)
- Trend Management How To Effectively Use Trend-Knowledge in Your Company (Jörg Blechschmidt)Document121 pagesTrend Management How To Effectively Use Trend-Knowledge in Your Company (Jörg Blechschmidt)Antonio Gonzalez AriasNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- BME634-Lab1 Separately Excited DC MotorDocument24 pagesBME634-Lab1 Separately Excited DC Motorc24bhrkk6pNo ratings yet
- De La Salle University Dasmarinas: Experiment No. 4 DC Shunt MotorDocument6 pagesDe La Salle University Dasmarinas: Experiment No. 4 DC Shunt MotorMizhar GerardoNo ratings yet
- Exp 7Document11 pagesExp 7John Renzel RiveraNo ratings yet
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- ECCE4356 Lab Manual 2Document29 pagesECCE4356 Lab Manual 2Siva Bala KrishnanNo ratings yet
- Experiment 04Document7 pagesExperiment 04Zeynal Abidin ŞabaşNo ratings yet
- Lab # 7 - DC Machines Part 3 Separately Excited DC GeneratorDocument6 pagesLab # 7 - DC Machines Part 3 Separately Excited DC GeneratorAdeel SyedNo ratings yet
- Induction MatlabDocument12 pagesInduction Matlabgrido002No ratings yet
- Analysis of D.C. Electric Motors: EEEE 531 - Mechatronics Experiment #2Document8 pagesAnalysis of D.C. Electric Motors: EEEE 531 - Mechatronics Experiment #2kay_rolNo ratings yet
- Electrical and Electronics Lab Manual For Mechanical EngineeringDocument21 pagesElectrical and Electronics Lab Manual For Mechanical EngineeringSreerag Kunnathu SugathanNo ratings yet
- 2 Brake Test On DC Shunt MotorDocument12 pages2 Brake Test On DC Shunt MotorMahesh Patil100% (1)
- E M L - M: Lectrical Achines AB AnualDocument29 pagesE M L - M: Lectrical Achines AB AnualSuresh Kumar MunnurukapuNo ratings yet
- Control Material Module IIDocument15 pagesControl Material Module IIAbiodun MustaphaNo ratings yet
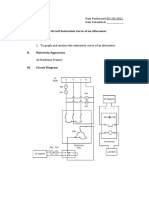
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDocument4 pagesOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezNo ratings yet
- DC Motors: 2.0 ObjectivesDocument16 pagesDC Motors: 2.0 ObjectivesBelayet RonyNo ratings yet
- Experiment No.6 The DC Shunt Motor RatingDocument7 pagesExperiment No.6 The DC Shunt Motor RatingMounta1n DewNo ratings yet
- DC Shunt MotorDocument9 pagesDC Shunt MotorPeterNo ratings yet
- Ec221 Lab04 PDFDocument5 pagesEc221 Lab04 PDFishara karunarathnaNo ratings yet
- Control System Lab EE-324-FDocument45 pagesControl System Lab EE-324-FDheeraj KumarNo ratings yet
- Bersabal - Experiment 25 - Ee435alDocument8 pagesBersabal - Experiment 25 - Ee435alCegrow Ber BersabalNo ratings yet
- Lab Manual Load - Test - On - DC - Shunt - Motor PDFDocument8 pagesLab Manual Load - Test - On - DC - Shunt - Motor PDFfongNo ratings yet
- EXPERIMENT Induction MotorDocument10 pagesEXPERIMENT Induction MotorMohamed Meeran100% (1)
- Exp. 2 - OCC and Load Test On AlternatorDocument7 pagesExp. 2 - OCC and Load Test On AlternatorKailash Jagarwal100% (1)
- Chapter 5Document34 pagesChapter 5Jayshon Montemayor100% (1)
- DC Motors Speed Control - ModDocument9 pagesDC Motors Speed Control - ModAnuja VargheseNo ratings yet
- Lab9 - Shunt and Cumulative Compound DC GeneratorsDocument12 pagesLab9 - Shunt and Cumulative Compound DC GeneratorsMomal ARNo ratings yet
- Total 363 Lab ManualDocument67 pagesTotal 363 Lab ManualBisal Sarker JoyNo ratings yet
- Three-Phase Induction MotorDocument10 pagesThree-Phase Induction MotorMadarwi SarwaNo ratings yet
- Exp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andDocument9 pagesExp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andSanjay MeenaNo ratings yet
- Practical Activity 2 DC Shunt Motor PLMDocument9 pagesPractical Activity 2 DC Shunt Motor PLMMarc Jairro GajudoNo ratings yet
- Experiment 03Document8 pagesExperiment 03Zeynal Abidin ŞabaşNo ratings yet
- EE 448 Laboratory Experiment 4 Introduction To DC MotorsDocument10 pagesEE 448 Laboratory Experiment 4 Introduction To DC MotorsjegjegtNo ratings yet
- Lab 12 - Universal MotorDocument8 pagesLab 12 - Universal MotorSanjeev Kumar Jha50% (2)
- Electrical Machines Lab: Experiment 2ADocument9 pagesElectrical Machines Lab: Experiment 2AARTI RAWATNo ratings yet
- ASSIGNMENT Elektric q1-q3Document16 pagesASSIGNMENT Elektric q1-q3Nur Aisyah ZainuddinNo ratings yet
- ECEN 441-504: Electronic Motor Drive: Lab 3: Operating Characteristics of The Separately Excited DC MotorDocument6 pagesECEN 441-504: Electronic Motor Drive: Lab 3: Operating Characteristics of The Separately Excited DC Motorapi-241454978No ratings yet
- Control System Lab ManualDocument63 pagesControl System Lab ManualkrishnandrkNo ratings yet
- Experiment - No.10 Load Test On DC Shunt Motor: DATE:10/12/2021Document6 pagesExperiment - No.10 Load Test On DC Shunt Motor: DATE:10/12/2021Baba YagaNo ratings yet
- AC Motor - FormulasDocument10 pagesAC Motor - FormulasJay Mark Balane100% (1)
- Experiment 6: Alternator Characteristics ObjectDocument4 pagesExperiment 6: Alternator Characteristics ObjectarjayNo ratings yet
- Induction Motor Lab ManualDocument11 pagesInduction Motor Lab ManualRabah ZaimeddineNo ratings yet
- Engineering Lab 5 Machine Lab Lab 1 ReportDocument9 pagesEngineering Lab 5 Machine Lab Lab 1 Reportram010No ratings yet
- DC Shunt MotorDocument9 pagesDC Shunt MotorPeterNo ratings yet
- Injection of EMF in Rotor Circuit PDFDocument5 pagesInjection of EMF in Rotor Circuit PDFkhidirtay50% (2)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Pism Pub Line Up - Jul-Dec - 2022Document1 pagePism Pub Line Up - Jul-Dec - 2022Yus CeballosNo ratings yet
- AutoCAD 2006 Installing Network License Manager0Document12 pagesAutoCAD 2006 Installing Network License Manager0gurugovindanNo ratings yet
- Analysis and Design of Cantilever Slab Analysis and Design of Cantilever SlabDocument3 pagesAnalysis and Design of Cantilever Slab Analysis and Design of Cantilever SlabMesfinNo ratings yet
- Jurong Junior College: Preliminary Examination 2009Document16 pagesJurong Junior College: Preliminary Examination 2009cjcsucksNo ratings yet
- Loading and Hauling Dump Truck: DumperDocument2 pagesLoading and Hauling Dump Truck: DumperRJNo ratings yet
- Addis Ababa University Lecture NoteDocument65 pagesAddis Ababa University Lecture NoteTADY TUBE OWNER100% (9)
- Description: Super Thoroseal Is A Blend of PortlandDocument2 pagesDescription: Super Thoroseal Is A Blend of Portlandqwerty_conan100% (1)
- Imarest 2021 Warship Development 1997Document43 pagesImarest 2021 Warship Development 1997nugrohoNo ratings yet
- Lab Science of Materis ReportDocument22 pagesLab Science of Materis ReportKarl ToddNo ratings yet
- Adsa Ka SyllabusDocument3 pagesAdsa Ka SyllabusHacker RanjanNo ratings yet
- NAAC 10.12.1888888 NewDocument48 pagesNAAC 10.12.1888888 Newచిమ్ముల సందీప్ రెడ్డిNo ratings yet
- Employment Under Dubai Electricity & Water AuthorityDocument6 pagesEmployment Under Dubai Electricity & Water AuthorityMominur Rahman ShohagNo ratings yet
- Lifestyle Mentor. Sally & SusieDocument2 pagesLifestyle Mentor. Sally & SusieLIYAN SHENNo ratings yet
- Brochure - Mounted Telescopic Crane (S) - NOVEMBER - 2018Document2 pagesBrochure - Mounted Telescopic Crane (S) - NOVEMBER - 2018Fernanda RizaldoNo ratings yet
- ECON 304 Course ContentDocument2 pagesECON 304 Course ContentAanand JhaNo ratings yet
- Preview - ISO+8655 6 2022Document6 pagesPreview - ISO+8655 6 2022s7631040No ratings yet
- ACFrOgDVly789-6Z8jIbi7pBoLupubEgMyOp7PczEvUguHoW3uj oR2PKzDvuhRzzkIhacYjxXRrU6iA7sHt t6MhtpZFq0t uZL2pF5Ra NNZ kmcl5w7BCQeUegKhjRhNuou88XxLodzWwbsrDocument14 pagesACFrOgDVly789-6Z8jIbi7pBoLupubEgMyOp7PczEvUguHoW3uj oR2PKzDvuhRzzkIhacYjxXRrU6iA7sHt t6MhtpZFq0t uZL2pF5Ra NNZ kmcl5w7BCQeUegKhjRhNuou88XxLodzWwbsrJohn Steven LlorcaNo ratings yet
- A.O: Against Order: Desktop Hard Disk Laptop Hard Disk Scsi Hard Disk Adaptec Cards External Hard DiskDocument28 pagesA.O: Against Order: Desktop Hard Disk Laptop Hard Disk Scsi Hard Disk Adaptec Cards External Hard DiskArul brittoNo ratings yet
- Briefing Evaluation: Yes / No High / Low Yes / No High / Low Good / Inferior Yes / NoDocument4 pagesBriefing Evaluation: Yes / No High / Low Yes / No High / Low Good / Inferior Yes / NoAmmarah AzharNo ratings yet
- Understanding ISO 9001 Calibration RequirementsDocument6 pagesUnderstanding ISO 9001 Calibration RequirementsAldrin HernandezNo ratings yet
- s145 Series HMM 201902 PDFDocument73 pagess145 Series HMM 201902 PDFEuNo ratings yet
- Job No. 25800: Quebrada Blanca Fase 2Document1 pageJob No. 25800: Quebrada Blanca Fase 2Benjamín Muñoz MuñozNo ratings yet
- Leap Motion PDFDocument18 pagesLeap Motion PDFAnkiTwilightedNo ratings yet
- Question 1: As Shown in Figure 1. A 6-Pole, Long-Shunt Lap-Wound CompoundDocument4 pagesQuestion 1: As Shown in Figure 1. A 6-Pole, Long-Shunt Lap-Wound Compoundالموعظة الحسنه chanelNo ratings yet
- Dynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelDocument5 pagesDynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelenmnabilNo ratings yet
- Science 8: Learning Activity SheetDocument9 pagesScience 8: Learning Activity SheetVan Amiel CovitaNo ratings yet