You might also like
- Windows Registry PresentationDocument22 pagesWindows Registry Presentationvoxpop51No ratings yet
- Registry TweaksDocument67 pagesRegistry TweaksBandaru SateeshNo ratings yet
- DFIG Wind Power Rapid Controller Prototyping System Based On PXI and StarSimDocument7 pagesDFIG Wind Power Rapid Controller Prototyping System Based On PXI and StarSimRoger IlachoqueNo ratings yet
- Panasonic KX-TD500 Users Guide v1Document442 pagesPanasonic KX-TD500 Users Guide v1Петар ПитаревићNo ratings yet
- BP 09 08 Cover Story KorrDocument4 pagesBP 09 08 Cover Story KorrmeggioNo ratings yet
- Chapter 8 Software TestingDocument212 pagesChapter 8 Software TestingDiya DuttaNo ratings yet
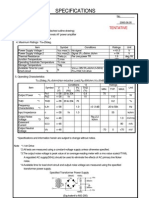
- STK442-110 70W Audio Power Amplifier SpecificationsDocument4 pagesSTK442-110 70W Audio Power Amplifier SpecificationsIvan AsimovNo ratings yet
- Solutions For Electic ChargeDocument9 pagesSolutions For Electic ChargeBreanna VenableNo ratings yet
- Free Range VHDLDocument151 pagesFree Range VHDLpickup666No ratings yet
- Panasonic Program CodesDocument4 pagesPanasonic Program CodesEiflaRamosStaRitaNo ratings yet
- Manuel Mazzara, Bertrand Meyer - Present and Ulterior Software Engineering (2017, Springer)Document225 pagesManuel Mazzara, Bertrand Meyer - Present and Ulterior Software Engineering (2017, Springer)Baltic Currency TradingNo ratings yet
- Chapter 1 IntroductionDocument64 pagesChapter 1 IntroductionAdarshGupta0% (1)
- Electric Circuit Analysis QBDocument16 pagesElectric Circuit Analysis QBboopathy kNo ratings yet
- Design Patterns in Modern C++: Reusable Approaches for Object-Oriented Software DesignFrom EverandDesign Patterns in Modern C++: Reusable Approaches for Object-Oriented Software DesignNo ratings yet
- DSP Book v300 Extended Preview InternetDocument303 pagesDSP Book v300 Extended Preview InternetSemoNo ratings yet
- Java Deployment With JNLP and WebStartDocument508 pagesJava Deployment With JNLP and WebStartniectzenNo ratings yet
- Developer's Guide To Microsoft Enterprise Library - 2nd EditionDocument245 pagesDeveloper's Guide To Microsoft Enterprise Library - 2nd Editionmanavsharma100% (1)
- OpenCV Android Programming by Example - Sample ChapterDocument41 pagesOpenCV Android Programming by Example - Sample ChapterPackt PublishingNo ratings yet
- Syllabus For Short Term FPGA CourseDocument2 pagesSyllabus For Short Term FPGA CoursemanikkalsiNo ratings yet
- Synthesis of LC & RC Networks Using Cauer I & II RealizationsDocument2 pagesSynthesis of LC & RC Networks Using Cauer I & II RealizationsRain EllorinNo ratings yet
- A Primer On Memory Consistency and CoherenceDocument214 pagesA Primer On Memory Consistency and Coherenceyxiefacebook100% (1)
- MASON Tutorial SlidesDocument43 pagesMASON Tutorial SlidesMaksim Tsvetovat100% (1)
- Chapter 2 Software Development Life Cycle ModelsDocument48 pagesChapter 2 Software Development Life Cycle ModelsGurteg SinghNo ratings yet
- Sams Asp Dotnet Evolution Isbn0672326477Document374 pagesSams Asp Dotnet Evolution Isbn0672326477paulsameeNo ratings yet
- Html5 Game DevelopmentDocument32 pagesHtml5 Game DevelopmentYinYangNo ratings yet
- Lavatory IdentificationDocument158 pagesLavatory IdentificationMax FajardowNo ratings yet
- Artificial Intelligence - Mini-Max AlgorithmDocument5 pagesArtificial Intelligence - Mini-Max AlgorithmAfaque AlamNo ratings yet
- SSCDNotes PDFDocument53 pagesSSCDNotes PDFshreenathk_n100% (1)
- VisualSVN - Subversion For Visual StudioDocument46 pagesVisualSVN - Subversion For Visual Studiojishin100% (7)
- Unit3pptx 2019 03 05 13 35 22Document116 pagesUnit3pptx 2019 03 05 13 35 22Vishal JoshiNo ratings yet
- Unit 8Document24 pagesUnit 8badboy_rockss0% (1)
- Linear Algebra in Gaming: Vectors, Distances & Virtual EnvironmentsDocument8 pagesLinear Algebra in Gaming: Vectors, Distances & Virtual EnvironmentsjuanNo ratings yet
- Opearating System LAb FilesDocument128 pagesOpearating System LAb FilesAshish100% (1)
- DSP Principles Algorithms and Applications Third EditionDocument1,033 pagesDSP Principles Algorithms and Applications Third EditionHarish Gunasekaran100% (1)
- Python TutorialDocument32 pagesPython TutorialjunyhuiNo ratings yet
- W3Schools: Angularjs Ajax - $HTTPDocument12 pagesW3Schools: Angularjs Ajax - $HTTPccalin10No ratings yet
- (Lecture ... _ Lecture Notes in Artificial Intelligence) Ian F.C. Smith - Intelligent Computing in Engineering and Architecture_ 13th EG-ICE Workshop 2006, Ascona, Switzerland, June 25-30, 2006, Revis.pdfDocument703 pages(Lecture ... _ Lecture Notes in Artificial Intelligence) Ian F.C. Smith - Intelligent Computing in Engineering and Architecture_ 13th EG-ICE Workshop 2006, Ascona, Switzerland, June 25-30, 2006, Revis.pdfcxwNo ratings yet
- 567 Pramujati Intro To Auto ControlDocument15 pages567 Pramujati Intro To Auto ControlCruise_IceNo ratings yet
- GATE Transducers BookDocument12 pagesGATE Transducers BookFaniAli100% (1)
- Visual Prolog 5.0 - GetstartDocument149 pagesVisual Prolog 5.0 - GetstartAlessandroNo ratings yet
- Face RecognitionDocument26 pagesFace RecognitionDhinesh_90No ratings yet
- Concurrent Window System - Rob PikeDocument11 pagesConcurrent Window System - Rob PikeIvan VNo ratings yet
- MSP430 LaunchPad Workshop v2.22Document260 pagesMSP430 LaunchPad Workshop v2.22phwindNo ratings yet
- Bad IdeasDocument69 pagesBad IdeasArmin RonacherNo ratings yet
- 01 Version ControlDocument37 pages01 Version ControlImad AlbadawiNo ratings yet
- Speech Recognition Using Ic HM2007Document31 pagesSpeech Recognition Using Ic HM2007Nitin Rawat100% (4)
- Digital Signal Processing Introduction PartDocument13 pagesDigital Signal Processing Introduction Partshankar100% (1)
- Searching in C#Document181 pagesSearching in C#writetogupta100% (1)
- Operating SystemsDocument85 pagesOperating SystemsAli JameelNo ratings yet
- 9780134048192Document79 pages9780134048192AS BAKA100% (1)
- Computer Hardware Servicing LecturesDocument244 pagesComputer Hardware Servicing LecturesGladysNo ratings yet
- Opencv TutorialsDocument349 pagesOpencv TutorialsMartin Carames AbenteNo ratings yet
- Algorithm & ComplexitiesDocument28 pagesAlgorithm & ComplexitiesWan Azra Balqis Binti Che Mohd ZainudinNo ratings yet
- Intro Notes on Design and Analysis of AlgorithmsDocument25 pagesIntro Notes on Design and Analysis of AlgorithmsrocksisNo ratings yet
- Design and Analysis of AlgorithmDocument33 pagesDesign and Analysis of AlgorithmajNo ratings yet
- Chapter 2 - Elementary Searching and Sorting AlgorithmsDocument25 pagesChapter 2 - Elementary Searching and Sorting Algorithmsmishamoamanuel574No ratings yet
- K. J. Somaiya College of Engineering, Mumbai-77Document7 pagesK. J. Somaiya College of Engineering, Mumbai-77ARNAB DENo ratings yet
- CSA Lab 4Document6 pagesCSA Lab 4vol damNo ratings yet
- Searching and SortingDocument119 pagesSearching and SortingRajkumar MurugesanNo ratings yet
- Date Symbol Open High Low Close Action Moving AverageDocument3 pagesDate Symbol Open High Low Close Action Moving AverageBalaji JadhavNo ratings yet
- Forex Trading StrategiesDocument30 pagesForex Trading StrategiesKali GallardoNo ratings yet
- Nifty500 CompaniesDocument1 pageNifty500 CompaniesBalaji JadhavNo ratings yet
- Trailing SLDocument1 pageTrailing SLBalaji JadhavNo ratings yet
- Down Up Sell Buy Stop Loss Buy TargetDocument2 pagesDown Up Sell Buy Stop Loss Buy TargetBalaji JadhavNo ratings yet
- IntervieweQuestion SelfDocument4 pagesIntervieweQuestion SelfBalaji JadhavNo ratings yet
- Nifty Jan 18 Futures OrdersDocument1 pageNifty Jan 18 Futures OrdersBalaji JadhavNo ratings yet
- AgsDocument39 pagesAgsBalaji JadhavNo ratings yet
- Risk RewardDocument1 pageRisk RewardBalaji JadhavNo ratings yet
- Forex Trading StrategiesDocument30 pagesForex Trading StrategiesKali GallardoNo ratings yet
- Module2 1Document84 pagesModule2 1Kr Prajapat100% (1)
- Zenqa Question PaperDocument5 pagesZenqa Question PaperBalaji JadhavNo ratings yet
- AOA PreludeDocument6 pagesAOA Prelude9chand3No ratings yet
- AOA Analysis of Well Known AlgorithmsDocument29 pagesAOA Analysis of Well Known AlgorithmsBalaji JadhavNo ratings yet
- Program TestDocument2 pagesProgram TestBalaji JadhavNo ratings yet
- UK Tier1 General Visa Holder Seeks .NET Developer RoleDocument6 pagesUK Tier1 General Visa Holder Seeks .NET Developer RoleBalaji JadhavNo ratings yet
- Fresher Dotnet Resume Model 6 NetDocument2 pagesFresher Dotnet Resume Model 6 NetBalaji JadhavNo ratings yet
- STC Day Trading PlanDocument19 pagesSTC Day Trading Planyraion100% (1)
- Infosys ExperienceDocument2 pagesInfosys ExperienceBalaji JadhavNo ratings yet
- Interview Questions Topic Wise PDFDocument7 pagesInterview Questions Topic Wise PDFBalaji KommaNo ratings yet
- 8M-BIT SERIAL FLASH MEMORY WITH 4KB SECTORS AND DUAL I/O SPIDocument50 pages8M-BIT SERIAL FLASH MEMORY WITH 4KB SECTORS AND DUAL I/O SPImartin sembinelliNo ratings yet
- Poll Day Monitoring SystemDocument40 pagesPoll Day Monitoring Systemravikant143No ratings yet
- SketchUp 2016 HelpDocument175 pagesSketchUp 2016 Helpdimtcho jacksonNo ratings yet
- Network QuestionsDocument4 pagesNetwork QuestionsmicuNo ratings yet
- 1000 Ways To Pack The Bin PDFDocument50 pages1000 Ways To Pack The Bin PDFafsarNo ratings yet
- Final PPT Dab301Document17 pagesFinal PPT Dab301KARISHMA PRADHANNo ratings yet
- FOX505 Product Manual 1KHW001973 Ed02dDocument139 pagesFOX505 Product Manual 1KHW001973 Ed02dSamuel Freire Corrêa100% (1)
- VLOG 4: Subtraction of Decimals (Flow)Document3 pagesVLOG 4: Subtraction of Decimals (Flow)Earl CalingacionNo ratings yet
- FCI ST100 Series Thermal Mass Flow MetersDocument20 pagesFCI ST100 Series Thermal Mass Flow Metersivan8villegas8buschNo ratings yet
- AIAG VDA DFMEA TrainingDocument68 pagesAIAG VDA DFMEA TrainingAtul SURVE100% (2)
- What Is New in PTV Vissim/Viswalk 11Document20 pagesWhat Is New in PTV Vissim/Viswalk 11Billy BrosNo ratings yet
- Bangladesh Army: User Id: LezlvpDocument1 pageBangladesh Army: User Id: LezlvpBulbul AhmedNo ratings yet
- Age CalculationDocument4 pagesAge CalculationMuhammad Hafeez ShaikhNo ratings yet
- NSPFEM2D: A Lightweight 2D Node-Based Smoothed Particle Finite Element Method Code For Modeling Large DeformationDocument16 pagesNSPFEM2D: A Lightweight 2D Node-Based Smoothed Particle Finite Element Method Code For Modeling Large DeformationShu-Gang AiNo ratings yet
- Perkin Elmer Icp Oes Winlab User GuideDocument569 pagesPerkin Elmer Icp Oes Winlab User GuideLuz Contreras50% (2)
- (M8S2-POWERPOINT) - Data Control Language (DCL)Document24 pages(M8S2-POWERPOINT) - Data Control Language (DCL)Yael CabralesNo ratings yet
- Belkin Router Manual PDFDocument120 pagesBelkin Router Manual PDFChrisKelleherNo ratings yet
- Tracking, Track Parcels, Packages, Shipments - DHL Express TrackingDocument2 pagesTracking, Track Parcels, Packages, Shipments - DHL Express TrackingJosue GalindoNo ratings yet
- Hackerrank Phase 1 Functional Programming PDFDocument25 pagesHackerrank Phase 1 Functional Programming PDFPawan NaniNo ratings yet
- Some New Fixed Point Theorems For Generalized Weak Contraction in Partially Ordered Metric SpacesDocument9 pagesSome New Fixed Point Theorems For Generalized Weak Contraction in Partially Ordered Metric SpacesNaveen GulatiNo ratings yet
- Sarvesh PresentationDocument12 pagesSarvesh PresentationSarvesh SoniNo ratings yet
- Business Communication TodayDocument39 pagesBusiness Communication TodaymzNo ratings yet
- AZ 301 StarWarDocument188 pagesAZ 301 StarWarranjeetsingh2908No ratings yet
- List of Console Commands - Dota 2 WikiDocument82 pagesList of Console Commands - Dota 2 WikiOscar Taype Cayllahua50% (2)
- Smart Mirror: A Reflective Interface To Maximize ProductivityDocument6 pagesSmart Mirror: A Reflective Interface To Maximize Productivityعلو الدوريNo ratings yet
- Barbering Course DesignDocument94 pagesBarbering Course DesignNovalyn PaguilaNo ratings yet
- User Manual For PileGroupDocument120 pagesUser Manual For PileGroupmyplaxisNo ratings yet
- Der DirectoryDocument262 pagesDer DirectoryBenNo ratings yet
- What are the cousins of the compilerDocument6 pagesWhat are the cousins of the compilerManinblack ManNo ratings yet