You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Calculation ReportDocument157 pagesCalculation Reportisaacjoe77100% (3)
- LEAP-1A A3 79-Oil System Rev2.0Document1 pageLEAP-1A A3 79-Oil System Rev2.0SatishReddy100% (2)
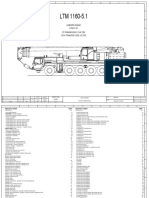
- Libherr CraneDocument157 pagesLibherr Craneali67% (3)
- Turbine Start-Up SOPDocument17 pagesTurbine Start-Up SOPCo-gen ManagerNo ratings yet
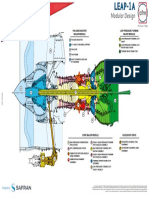
- LEAP-1A A3 Modular Design Rev2.0Document1 pageLEAP-1A A3 Modular Design Rev2.0SatishReddy100% (4)
- Module 3 QsDocument44 pagesModule 3 QsSatishReddyNo ratings yet
- Task 46!21!00-710-002-A VHF 3 Link Test of The AtsuDocument8 pagesTask 46!21!00-710-002-A VHF 3 Link Test of The AtsuSatishReddyNo ratings yet
- Dgca Module 11 Part 06Document19 pagesDgca Module 11 Part 06SatishReddyNo ratings yet
- Hypothesis Testing Random MotorsDocument8 pagesHypothesis Testing Random MotorsLinn ArshadNo ratings yet
- Task 46!21!00-740-001-A Bite Test of The AtimsDocument4 pagesTask 46!21!00-740-001-A Bite Test of The AtimsSatishReddy100% (1)
- Energy BodiesDocument1 pageEnergy BodiesannoyingsporeNo ratings yet
- Skirmishes Graham Harman PDFDocument383 pagesSkirmishes Graham Harman PDFparaiaNo ratings yet
- SD-NOC-MAR-202 - Rev00 Transfer of Personnel at Offshore FacilitiesDocument33 pagesSD-NOC-MAR-202 - Rev00 Transfer of Personnel at Offshore Facilitiestho03103261100% (1)
- Dissertation BitsDocument21 pagesDissertation BitsSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument1 pagePlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument1 pagePlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- 04 Sensors AircraftDocument3 pages04 Sensors AircraftSatishReddyNo ratings yet
- Journal Article Without DOIDocument2 pagesJournal Article Without DOISatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- Evolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemDocument7 pagesEvolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemSatishReddyNo ratings yet
- Approved Course Mto TRV PDFDocument1 pageApproved Course Mto TRV PDFSatishReddyNo ratings yet
- ATR 72-212A 01 of 2016Document1 pageATR 72-212A 01 of 2016SatishReddyNo ratings yet
- M11 May 2018Document8 pagesM11 May 2018SatishReddyNo ratings yet
- ProjectDocument4 pagesProjectSatishReddyNo ratings yet
- TASK 12!13!79-610-011-A Check Oil Level and ReplenishDocument6 pagesTASK 12!13!79-610-011-A Check Oil Level and ReplenishSatishReddyNo ratings yet
- Human Development and Performance Throughout The Lifespan 2nd Edition Cronin Mandich Test BankDocument4 pagesHuman Development and Performance Throughout The Lifespan 2nd Edition Cronin Mandich Test Bankanne100% (28)
- NiftDocument3 pagesNiftMegha Nair PillaiNo ratings yet
- HCH - 15 04 004Document5 pagesHCH - 15 04 004NarvaxisNo ratings yet
- Mining Discriminative Patterns To Predict Health Status For Cardiopulmonary PatientsDocument56 pagesMining Discriminative Patterns To Predict Health Status For Cardiopulmonary Patientsaniltatti25No ratings yet
- Use The Analysis ToolPak To Perform Complex Data Analysis - Excel - OfficeDocument5 pagesUse The Analysis ToolPak To Perform Complex Data Analysis - Excel - OfficedakingNo ratings yet
- 19 71 Hydrologic Engineering Methods For Water Resources DevelopmentDocument654 pages19 71 Hydrologic Engineering Methods For Water Resources DevelopmentMartha LetchingerNo ratings yet
- Lecture 5Document20 pagesLecture 5Paylaşım KanalıNo ratings yet
- QSMT Chapter 1Document5 pagesQSMT Chapter 1Rachelle Mae SalvadorNo ratings yet
- Swot Matrix Strengths WeaknessesDocument6 pagesSwot Matrix Strengths Weaknessestaehyung trash100% (1)
- Myers Briggs Type Indicator-2Document1 pageMyers Briggs Type Indicator-2api-261818438No ratings yet
- SQL - Day 2: Structured Query LanguageDocument10 pagesSQL - Day 2: Structured Query LanguageNight KingNo ratings yet
- Basic Approach To The Audit of Electronically Processed DataDocument2 pagesBasic Approach To The Audit of Electronically Processed DataJestell Ann ArzagaNo ratings yet
- How To Install 64 Bits IDES On 32 Bits OSDocument1 pageHow To Install 64 Bits IDES On 32 Bits OSMuhammad JaveedNo ratings yet
- Engineering Geology: Wei-Min Ye, Yong-Gui Chen, Bao Chen, Qiong Wang, Ju WangDocument9 pagesEngineering Geology: Wei-Min Ye, Yong-Gui Chen, Bao Chen, Qiong Wang, Ju WangmazharNo ratings yet
- Electro TechniquesDocument2 pagesElectro TechniquesPinkk DaisyfieldNo ratings yet
- Module 1 Supply Chain Management in Hospitality IndustryDocument39 pagesModule 1 Supply Chain Management in Hospitality IndustryHazelyn BiagNo ratings yet
- UntitledDocument5 pagesUntitledapril montejoNo ratings yet
- Manish Kumar: Desire To Work and Grow in The Field of MechanicalDocument4 pagesManish Kumar: Desire To Work and Grow in The Field of MechanicalMANISHNo ratings yet
- Mathematics4 q4 Week4 v4Document11 pagesMathematics4 q4 Week4 v4Morales JinxNo ratings yet
- (Ug, PG & PHD) Fellowship: Tih-Iot Chanakya GroupDocument3 pages(Ug, PG & PHD) Fellowship: Tih-Iot Chanakya GroupVijay M.MNo ratings yet
- CHASE SSE-EHD 1900-RLS LockedDocument2 pagesCHASE SSE-EHD 1900-RLS LockedMarcos RochaNo ratings yet
- Auto CadDocument67 pagesAuto CadkltowerNo ratings yet
- Green ThumbDocument2 pagesGreen ThumbScarlet Sofia Colmenares VargasNo ratings yet