You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Final Whole PHD ThesisDocument294 pagesFinal Whole PHD ThesisLIBIO ESTEPANo ratings yet
- Polya Problem Solving StrategiesDocument12 pagesPolya Problem Solving StrategiesGwandaleana VwearsosaNo ratings yet
- Syllabus EMSE6760 DDLDocument4 pagesSyllabus EMSE6760 DDLlphiekickmydogNo ratings yet
- Basic Electronics Lab ManualDocument47 pagesBasic Electronics Lab ManualAlpesh ThesiyaNo ratings yet
- T0000598REFTRGiDX 33RevG01052017 PDFDocument286 pagesT0000598REFTRGiDX 33RevG01052017 PDFThanhNo ratings yet
- Rotary Valve Functions BookletDocument17 pagesRotary Valve Functions Bookletamahmoud3No ratings yet
- MusicDocument2 pagesMusicrpkmidNo ratings yet
- Lesson PlanDocument5 pagesLesson PlanrpkmidNo ratings yet
- Fake BookDocument3 pagesFake BookrpkmidNo ratings yet
- Port Is ProducedDocument3 pagesPort Is ProducedrpkmidNo ratings yet
- Our PhilosophyDocument2 pagesOur PhilosophyrpkmidNo ratings yet
- The Word WhiskyDocument2 pagesThe Word WhiskyrpkmidNo ratings yet
- BananaDocument2 pagesBananarpkmidNo ratings yet
- Dynamics in MusicDocument4 pagesDynamics in MusicrpkmidNo ratings yet
- Dynamics in MusicDocument4 pagesDynamics in MusicrpkmidNo ratings yet
- Jack FruitDocument2 pagesJack FruitrpkmidNo ratings yet
- Pomaceous Fruit Tree Family Rosaceae Cultivated Genus Deciduous Central AsiaDocument1 pagePomaceous Fruit Tree Family Rosaceae Cultivated Genus Deciduous Central AsiarpkmidNo ratings yet
- Pomaceous Fruit Tree Family Rosaceae Cultivated Genus Deciduous Central AsiaDocument1 pagePomaceous Fruit Tree Family Rosaceae Cultivated Genus Deciduous Central AsiarpkmidNo ratings yet
- Simple Harmonic Oscillator: 1 HamiltonianDocument10 pagesSimple Harmonic Oscillator: 1 HamiltonianAbdurrahman imamNo ratings yet
- Sympoly Toolbox IssuesDocument7 pagesSympoly Toolbox IssuesAli FahemNo ratings yet
- Chap005 3Document26 pagesChap005 3Anass BNo ratings yet
- Ticket Eater - User Manual 2006Document24 pagesTicket Eater - User Manual 2006tokio2424No ratings yet
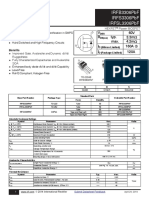
- Irfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADocument12 pagesIrfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADirson Volmir WilligNo ratings yet
- Quant Short Tricks PDFDocument183 pagesQuant Short Tricks PDFAarushi SaxenaNo ratings yet
- Budget of Work Sci5Document1 pageBudget of Work Sci5Jhoy Angeles PinlacNo ratings yet
- The Big TEGO. Products Services Data Sheets-75-150-16!76!31-61Document31 pagesThe Big TEGO. Products Services Data Sheets-75-150-16!76!31-61DWI RAHMASARI FATMAWATINo ratings yet
- Fiberlogic CarrierEthernet 842 5300 PresentationDocument41 pagesFiberlogic CarrierEthernet 842 5300 PresentationDuong Thanh Lam0% (1)
- Math 10 Q2 Week 5Document3 pagesMath 10 Q2 Week 5Ken FerrolinoNo ratings yet
- ST7201-Finite Element MethodDocument14 pagesST7201-Finite Element MethodVishal RanganathanNo ratings yet
- Bloom QuestionsDocument270 pagesBloom QuestionsrameshsmeNo ratings yet
- Aluminum: DR 900 Analytical ProcedureDocument4 pagesAluminum: DR 900 Analytical Procedurewulalan wulanNo ratings yet
- Illiquidity and Stock Returns - Cross-Section and Time-Series Effects - Yakov AmihudDocument50 pagesIlliquidity and Stock Returns - Cross-Section and Time-Series Effects - Yakov AmihudKim PhượngNo ratings yet
- Decision-Making Under Risk and Uncertainty: OutcomesDocument21 pagesDecision-Making Under Risk and Uncertainty: OutcomesprabodhNo ratings yet
- Hitachi HDDs Repair Scheme Based On MRT ProDocument21 pagesHitachi HDDs Repair Scheme Based On MRT ProvicvpNo ratings yet
- Air Movements 06-26-2019 - Full ScoreDocument5 pagesAir Movements 06-26-2019 - Full ScoreMichael CrawfordNo ratings yet
- Bubble Sort ExampleDocument7 pagesBubble Sort Examplenur_anis_8No ratings yet
- Water Levels Forecast in Thailand: A Case Study of Chao Phraya RiverDocument6 pagesWater Levels Forecast in Thailand: A Case Study of Chao Phraya RiverErna UtamiNo ratings yet
- Pressure Sensor Air PST Datasheet 51 en 2780071435Document3 pagesPressure Sensor Air PST Datasheet 51 en 2780071435Luis GuevaraNo ratings yet
- Finches Statistics Student-1Document7 pagesFinches Statistics Student-1api-319172404No ratings yet
- Chapter 6 AssignmentDocument6 pagesChapter 6 AssignmentRohit RajeevNo ratings yet
- Biomechanic of Foot PDFDocument8 pagesBiomechanic of Foot PDFMichealowen BabygoalNo ratings yet
- North Sails Brochure 2007 enDocument24 pagesNorth Sails Brochure 2007 ennorthsailsNo ratings yet