You might also like
- Villalobos, Jorge - Fundamentos de ProgramacionDocument378 pagesVillalobos, Jorge - Fundamentos de ProgramacionJuan Manuel Barrera Fdz100% (3)
- 1.1 Plan de Estudios MGMDocument38 pages1.1 Plan de Estudios MGMVirgilio RamirezNo ratings yet
- 10 Micro Interruptores AMBDocument14 pages10 Micro Interruptores AMBJuan Manuel Barrera FdzNo ratings yet
- Lubricación IndustrialDocument18 pagesLubricación IndustrialJuan Manuel Barrera FdzNo ratings yet
- Simbologias Control Electrico IndustrialDocument57 pagesSimbologias Control Electrico IndustrialJulio94% (16)
- Historiador SociólogoDocument7 pagesHistoriador SociólogoJuan Manuel Barrera FdzNo ratings yet
- Lubricacion ReporteDocument7 pagesLubricacion ReporteJuan Manuel Barrera FdzNo ratings yet
- ISO 9000 Normas de CalidadDocument40 pagesISO 9000 Normas de CalidadMaría José CanoNo ratings yet
- Mantenimiento IndustrialDocument24 pagesMantenimiento IndustrialJuan Manuel Barrera FdzNo ratings yet
- Mantenimiento CorrectivoDocument28 pagesMantenimiento CorrectivoEsteban BianchiNo ratings yet
- (L) Curso de Apicultura (Crianza de Abejas Y Produccion de Miel) PDFDocument51 pages(L) Curso de Apicultura (Crianza de Abejas Y Produccion de Miel) PDFjadruNo ratings yet
- 1 2clasificaciondelosrobotsDocument21 pages1 2clasificaciondelosrobotsJuan Manuel Barrera FdzNo ratings yet
- Lubricacion DesbloqueadoDocument23 pagesLubricacion DesbloqueadoSunlight1708No ratings yet
- 12 LubricacionDocument9 pages12 LubricacionAntony Solis FloresNo ratings yet
- Robind - C7 1 2007Document13 pagesRobind - C7 1 2007Juan Manuel Barrera FdzNo ratings yet
- Tabla Especificacion TuberiaDocument2 pagesTabla Especificacion TuberiaMarcoAntonio CarhuamantaIbañezNo ratings yet
- Las Ecuaciones Del Campo Electromagnetico: ϕ π π R k c F c i UDocument12 pagesLas Ecuaciones Del Campo Electromagnetico: ϕ π π R k c F c i UDivina ProporciónNo ratings yet
- Energía CompresibleDocument2 pagesEnergía CompresibleJuan Manuel Barrera FdzNo ratings yet
- Funcion de Transfer en CIA de MotorDocument13 pagesFuncion de Transfer en CIA de MotorSamuel EsquivelNo ratings yet
- Aplicaciones Robótica IndustriaDocument15 pagesAplicaciones Robótica IndustriaAidee84No ratings yet
- Inversión de GiroDocument6 pagesInversión de GiroJUAN PABLO VARGASNo ratings yet
- Espectrometria Atomica y MolecularDocument61 pagesEspectrometria Atomica y MolecularDavid Rivas MacasNo ratings yet
- Control RefractariosDocument4 pagesControl RefractariosLeonardo Paul ZavaletaNo ratings yet
- Física EI Ideas N20Document2 pagesFísica EI Ideas N20ppalayo7529No ratings yet
- Controladores Lógicos Programables CuestionarioDocument2 pagesControladores Lógicos Programables CuestionarioAtzin LopezNo ratings yet
- Ubicación y pruebas sensores motor HyundaiDocument4 pagesUbicación y pruebas sensores motor HyundaicesarcarrionpascualNo ratings yet
- 5 Acreditación ONACDocument9 pages5 Acreditación ONACsebastian PeñalozaNo ratings yet
- Rectificador de media onda con diodo y resistenciaDocument8 pagesRectificador de media onda con diodo y resistenciaIvan MedranoNo ratings yet
- Guia Metodologia Formulacion IndicadoresDocument33 pagesGuia Metodologia Formulacion IndicadoresANGELMORNOVNo ratings yet
- Ensayo Anatomia y Tecnoligia de La MaderaDocument13 pagesEnsayo Anatomia y Tecnoligia de La MaderaAby Mendez FloresNo ratings yet
- Resumen Astm C 128Document9 pagesResumen Astm C 128Edwar Denis0% (2)
- Parcial Ecuaciones DiferencialesDocument6 pagesParcial Ecuaciones DiferencialesOMAR FERNANDO DURAN FIGUEROANo ratings yet
- Aspectos Basicos de Prevencion de Arremetidas y Control de PozosDocument13 pagesAspectos Basicos de Prevencion de Arremetidas y Control de PozosViviana JaramilloNo ratings yet
- Herrera Diana M19S2AI3Document8 pagesHerrera Diana M19S2AI3Diana HerreraNo ratings yet
- Átomos y Eucaristía: interacciones históricasDocument14 pagesÁtomos y Eucaristía: interacciones históricasEl Dragon BetNo ratings yet
- Proyección Hacia El FuturoDocument9 pagesProyección Hacia El FuturoTomas FantaNo ratings yet
- Guia Ejercicios de EstequiometriaDocument4 pagesGuia Ejercicios de EstequiometriaDarwin Contreras Pacheco100% (1)
- Nanomateriales de Dimensión CeroDocument29 pagesNanomateriales de Dimensión CeroKatherin Vásquez SalazarNo ratings yet
- Básico 61-80 Semana 14 Proyección Ortogonal Ángulo Diedro ResoluciónDocument42 pagesBásico 61-80 Semana 14 Proyección Ortogonal Ángulo Diedro ResoluciónIsmael Velasquez ValenciaNo ratings yet
- La Materia y Sus Formas de ExistenciadgsegDocument5 pagesLa Materia y Sus Formas de ExistenciadgsegJuan Guerrero BustamanteNo ratings yet
- AdhesionDocument73 pagesAdhesionALDO MENDOZA RIVERANo ratings yet
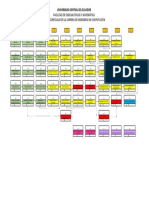
- 2018 Malla Ingeniería en ComputaciónDocument1 page2018 Malla Ingeniería en ComputaciónJosiasCardenasViteriNo ratings yet
- TABULADOR GDF Marzo 2011Document464 pagesTABULADOR GDF Marzo 2011samarty36No ratings yet
- Posibilidad de Construccion Con Adobe en El Casco Urbano FinalDocument54 pagesPosibilidad de Construccion Con Adobe en El Casco Urbano FinalllangiellNo ratings yet
- Teorema Fundamental Del Cálculo: AntiderivadasDocument21 pagesTeorema Fundamental Del Cálculo: Antiderivadasingrid rauNo ratings yet
- SKL-WP2 Hoja de datos de seguridadDocument7 pagesSKL-WP2 Hoja de datos de seguridadPako Hernandez PaezNo ratings yet
- La Solución FermiDocument5 pagesLa Solución FermipepeNo ratings yet
- Tema 5Document26 pagesTema 5Ana Sansano PérezNo ratings yet
- Altivar 310 - ATV310HU55N4EDocument4 pagesAltivar 310 - ATV310HU55N4Eboris benites calenzaniNo ratings yet