Professional Documents
Culture Documents
Risksensitive Planning Support For Forest Enterprises The YAFO Model PDF
Uploaded by
Carlos Alejandro Torres UlloaOriginal Description:
Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Risksensitive Planning Support For Forest Enterprises The YAFO Model PDF
Uploaded by
Carlos Alejandro Torres UlloaCopyright:
Available Formats
Risk-sensitive planning support for forest enterprises: The YAFO model
Fabian Hrtl
, Andreas Hahn, Thomas Knoke
Institute of Forest Management, Center of Life and Food Sciences Weihenstephan, Technische Universitt Mnchen (TUM), Hans-Carl-von-Carlowitz-Platz 2, 85354 Freising, Germany
a r t i c l e i n f o
Article history:
Received 4 October 2012
Received in revised form 11 March 2013
Accepted 14 March 2013
Keywords:
Economic optimization
Risk integration
Operational planning
Forest management planning
Nonlinear programming
Long-term objectives
a b s t r a c t
YAFO is a planning-support tool for the development of management plans under uncertainty focusing on
the forest enterprise level. Based on existing stand data, the software provides the calculation of manage-
ment scenarios (felling plans) for single stands that are optimized with respect to nancial considerations
and ecologica l constraints. Under these constraints, YAFO predicts timber stocks, harvest amounts and
nancial returns for each simulation period. The YAFO package consists of an optimization module, that
has been programmed using the modell ing software AIMMS. In addition, it contains two Excel-based
spreadsheet les an import and evaluation module and a risk analysis module. The YAFO model calcu-
lates nancially optimized management scenarios by means of the net present value development of sin-
gle stands. Optionally, the objective function can also consider risk s and uncertainties due to natural
calamities and timber price uctuations, using the value at risk approach or risk utility functions. Non-
linear programming algorithms are used as solution techniques. As YAFO provides the additional exibil-
ity to switch between two timber grading options on stand level, effects of timber price scenarios on
grading can be analyzed. Due to its modular design, it can be easily adopted to individual data bases.
2013 Elsevier B.V. All rights reserved.
1. Introduction
If one is to approach the problem of managing a forest enter-
prise in a sustainab le
1
way, it is necessary to tackle the question
of when to harvest which timber volume from which stand (forest
area with the same treatmen t). Due to the long production periods
in forests, especially in Centra l Europe, this decision is crucial in or-
der to avoid negative consequenc es that can potential ly last for dec-
ades. It is then no surprise that there is a long tradition of planning
techniques in forestry to address this problem. Georg Ludwig Hartig
(Hartig, 1795 ) and Heinrich Cotta (Cotta, 1804 ) are generally consid-
ered to be the rst forest scientists to have developed such applica-
ble solution techniques as regula tion by forest area and harvested
volume respectively . These techniques are commo nly known as
control techniques in forestry literature (Davis et al., 2001; Bettin-
ger, 2009 ). In the English forestry literature , there has been a contin-
uous enhancem ent of these initial forest planning techniques,
culminating in the integration of methods from decision theory,
operation s research and nance theory into forest enterpri se man-
agemen t (Davis et al., 2001; Buongiorno and Gilless, 2003; Rauscher,
2005; Reynolds et al., 2008 ).
Thus, planning /decision support systems (DSSs) correspond to
specic eras of forest management, starting with sustained yield,
and nally emerging in sustainable forest managemen t (SFM)
(Mathey et al., 2005; Hahn and Knoke, 2010 ). Mendoza (2005) dif-
ferentiates two approaches for decision support in forestry one
prescripti ve, algorithmic and highly structured, and the other
descriptive, soft and qualitativ e. He states, the latter has become
more popular and more widely applied, in part because of its afn-
ity to the participatory management approach (Mendoza , 2005, p.
252). Participatory decision making, and ecologically and socially
sound decisions are primarily related to intragenerational fairness
a cornerstone of SFM. Intergene rational fairness, however the
second cornersto ne of the World Commission on Environment
and Developmen ts (WCED, 1987 ) denition of a sustainab le devel-
opment, and the originally relevant criteria for sustainable forestry
(Hahn and Knoke, 2010 ) is less frequently addressed. Timber har-
vests are thus a matter of allocation where cuttings have to be car-
ried out in an efcient way with regard to future harvesting options.
Hence, our interest focuses on the producers perspecti ve, as we as-
sume sustainable forest management to be best promoted if land-
owners personally benet. At these scales, research activities in
recent years have develope d spatially explicit and geographically
sensitive systems (Varma et al., 2000; Reynolds et al., 2008 ). A
second point of action led to an increased emphasis on the adapta-
tion options due to serious changes in the decision environment
(Eriksson, 2006; Heinimann, 2010; Mermet and Farcy, 2011 ).
0168-1699/$ - see front matter 2013 Elsevier B.V. All rights reserved.
http://dx.doi.org/10.1016/j.compag.2013.03.004
Corresponding author. Tel.: +49 8161 71 4619; fax: +49 8161 71 4545.
E-mail address: haertl@forst.wzw.tum.de (F. Hrtl).
URL: http://www.waldinventur.wzw.tum.de (F. Hrtl).
1
Follo wing Speidel (1984) sustain able here means the abilit y of a forest
enterprise to provide timber, infrastructure and additional goods and services for
the benet of present and future generations in a continuous and optimal manner
(Knoke et al., 2012 ). For denition proble ms concerning this freque ntly used term
refer for example to Hahn and Knok e (2010).
Computers and Electronics in Agriculture 94 (2013) 5870
Contents lists available at SciVerse ScienceDi rect
Com puters and Electro nics in Agricu lture
j our nal homepage: www. el sevi er . com/ l ocat e/ compag
In general, the classic forest planning problem of allocating
areas to space and time can be considered as maximising an objec-
tive function. If one considers the single stands of a forest enter-
prise as options of a nance portfolio, one can build an objective
function that calculates the net present value (NPV) of all manage-
ment activities during the planning horizon. By means of linear
programmin g (LP) methods, it is possible to solve this optimizati on
problem by computer-assi sted numerical algorithms (Felbermeier
et al., 2007 ), which covers the highly structured and algorithmic
approach Mendoza , 2005 gured out.
LP is by far the most used method in forest planning as well as
in general land-use optimization (Bettinger and Chung, 2004;
Weintraub and Romero, 2006 ). Current research focuses on exten-
sions to LP like mixed integer (Fonseca et al., 2012 ) and goal (mul-
ti-objective ) programmin g (Diaz-Balteiro and Romero, 2008; Rivaz
and Yaghoob i, 2012 ), on non-linear approaches (Hof and Kent,
1990; Roise, 1990 ), on heuristic (stochastic) approaches like simu-
lated annealing (Georgiou and Papamichai l, 2008 ), tabu search and
genetic algorithms (Mosquera et al., 2011; Janov, 2012; Pukkala
and Kellomki, 2012 ), and on dynamic programming (Benjamin
et al., 2009 ), as well as on combinin g these techniques with spa-
tially explicit models (Seppelt and Voinov, 2002; Baskent and
Keles, 2005; Gustafson et al., 2006; Mathey et al., 2008; Wei and
Murray, 2012 ) and risk considerati ons (Martell et al., 1998; Kangas
and Kangas, 2004; Knoke et al., 2005; Mathey and Nelson, 2010;
Verderame et al., 2010 ).
Several papers (e. g. Gong, 1998; Knoke et al., 2001; Knoke and
Moog, 2005; Alvarez and Koskela, 2006; Beinhofe r, 2009; Roessiger
et al., 2011 ) have shown that forest managemen t decisions are se-
verely inuenced by risks. Such uncertainties can be caused by tim-
ber price uctuations (Brazee and Mendelsohn, 1988; Haight, 1990 )
as well as calamities (Meilby et al., 2001; Kouba, 2002; Hahn and
Knoke, 2010; Forsell et al., 2011; Hanewinkel et al., 2011; Griess
et al., 2012 ). So systems need to incorporate these deviations in or-
der to set up sustainable solutions. The evaluation of these uncer-
tainties can be accomplished for example through Monte Carlo
simulation techniques (Styblo Beder, 1995; Dieter, 2001 ). If the
aim is to integrate such risk effects into a model, a potential solu-
tion is to describe the resulting uctuations of nancial returns by
statistical values, such as mean and standard deviation (mean-var-
iance analysis). This statistical approach was used by Markowitz
(1952, 1959) in his portfolio theory (Mills and Hoover, 1982; Hilde-
brandt and Knoke, 2011 ). This approach assumes a Gaussian distri-
bution of the uctuating net revenues, but it has been shown to be
robust to deviations from normality (e. g. Glawischnig and Seidl,
2011). Other approaches for overcoming this limitation are repre-
sented by models based on stochastic dominance, downside risk,
and information gap theory (Knoke et al., 2008 ). Due to their math-
ematical structure, models considering risk effects in general must
be treated as nonlinear in nding a solution (Pukkala and Kangas,
1996; Knoke and Moog, 2005; Hildebrandt and Knoke, 2009;
Knoke et al., 2012 ). Nevertheless there are approaches to the inclu-
sion of uncertainties in linear programming techniques using ma-
trix models (Eriksson, 2006 ) or in stochasti c integer programmin g
(Alonso-Ayu so et al., 2011 ), or different measure ments of risk, such
as absolute deviation s (Konno and Yamazaki, 1991 ).
Literature is, however, largely missing approaches which allow
an easy and quick parameteris ation of this risk-sensitive planning
problem with abdication of assumptions concerning linearity
(Yousefpour et al., 2012 ). Many research projects about DSS are
based on forest growth simulators to which are added capabilities
to optimize the planning with regard to biophysical objectives. A
few examples are LMS/FVS (McCarter et al., 1998; Crookston and
Dixon, 2005 ), SAGALP (Chen and Gadow, 2002 ), HEUREKA (Lmas
and Eriksson, 2003 ), SADfLOR (Borges et al., 2003 ), DSD (Lexer
et al., 2005 ), MOTTI (Salminen et al., 2005 ), NED-2 (Twery et al.,
2005), FTM (Andersso n et al., 2005 ), HARVEST (Gustafson and Ras-
mussen, 2002 ), 4S TOOL (Kirilenko et al., 2007 ), AFFOREST (Gil-
liams et al., 2005 ), EMDS (Reynolds, 2006 ), ESC (Pyatt et al.,
2001), FSOS (Liu et al., 2000 ), and FORESTAR (Shao et al., 2005 ).
Other solutions like SIMO (Rasinmki et al., 2009 ) or Woodstock
(Remsoft Inc., 2012 ) try to go beyond biophysical objectives but
are acting more as a model development tool than a model itself.
Furthermore, modellin g approach es integrating risks, like the FOR-
EST OPTIMIZER project (Stang and Knoke, 2009 ) are scarce, and
also retain a linearisation of risks. For an overview of different ap-
proaches see Bjrndal et al., 2012
We therefore see the need for a further developmen t of an algo-
rithmic approach to address the question of optimal risk-sensitive
managemen t on the forest enterprise level over time using nonlin-
ear programming (NLP). Thus, the model presente d here is aimed
at making a planning and decision tool available to forest scien-
tists, as well as practitioner s, that can be used to solve a multitude
of problems without requiring any major adaptions.
The model considers not only the risk effects mentioned above,
but also the effects of different timber price scenarios . Climate
change mitigation policies as well as a fear of increasing scarcity
of fossil fuels provokes a growing demand for producing energy
from biomass. Due to that increase, the prices of fuel wood are ris-
ing, so that the competition between the material and thermal use
of wood is becoming more and more severe (Raunikar et al., 2010 ).
To analyse the effects of these competing lines of timber use, we
expand the model to include an option to decide simultaneously be-
tween two timber grading options during the allocation of stand
areas.
2
The combination of risk analysis with Monte Carlo simula-
tions, grading options and NLP techniques is a new way to handle
the planning problem at the enterprise level. For that purpos e, the
model generates probabili ty distribution s of the objective function
out of the original data, using timber price statistics and survival
function s for tree species. Finally, this combination of risk analysis
on enterprise level with Monte Carlo techniques and NLP is unique
so far and not available in the packages mentioned above.
In all of the model approaches mentioned here, it is possible to
analyse effects of constraint settings which simulate demands for
maintain ing or providing ecological or social functions of forests.
Comparing constrained solutions for the objective with uncon-
strained ones gives us the opportun ity to evaluate the costs of such
ecosystem services (Duraiapp ah, 2005 ), for example, how much
money a forest owner requires in exchange for providing such
functions. In this way we solve the problem of non-existent mar-
kets and prices for such ecosystem functions, at least from a pro-
viders perspective (Knoke et al., 2008 ).
2. Method
2.1. Basic model
YAFO
3
is a modular nonline ar optimiza tion model for forest
enterpri ses. It is based on a forest property that is spatiall y divided
into forest stands. Every stand i is an independ ent manage ment unit
that is characte rized, from a nancial point of view, through the
develop ment over time of its net revenues. The stands cannot split
up or merge within the model. The model consists of seven time
periods numbered from 0 to 6 the last of which is a recovery per-
iod that collects all remaining stand areas at the end of the investi-
gated time horizon. No thinning or felling is carried out in the last
period, instead, the remaining area of the stands not felled during
the simulated time horizon is stored which is then used as a factor
2
This is optional. The model can also be used for one-scenario optimizations.
3
Yet Another Forest Optimi zer.
F. Hrtl et al. / Computers and Electronics in Agriculture 94 (2013) 5870 59
in calcula ting the net present value of the stands. The remaining six
periods span a time horizon of 3060 years, as typical time steps in
forest growth models are 5 or 10 years. At every point in time t a
decision must be made to either thin or nally fell parts of the stand
area. To thin means that the stand remains, at least until the next
time period, and that only single trees will be removed for stand
improvem ent. The cutting intensity of these thinnings is normally
dened by silvicult ural concepts, and is not decided by the model.
Thinnings produce interme diate return s during the rotation period.
To fell means to cut the entire stand, or parts of it, at the end of
the rotation period and establis h a new stand generatio n. Regene ra-
tion costs must then be paid. These costs are determ ined based on
the dominant tree species as well as the stand age. The older a stand,
the lower the regeneratio n costs, to simulat e possibili ties for natural
regenera tion. This cost reduction is done by a regenera tion cost
moderat ion function that follow s a Weibull function, and can be ad-
justed to various local situation s by its parameters. For planned as
well as salvage fellings a new stand generatio n is simulated with
its ingrowth volumes for the follow ing periods. These ingrowth vol-
umes are included in the calculation of thinning and felling volumes
only from period ve onwards as it is assumed that there will be no
utilizabl e ingrowth volumes in stands younger than 25 years.
Furthermore, the model decides in each case which grading op-
tion is to be applied to that particular harvest. The model is free to
choose between these options. Additionally, in every period, a cer-
tain partial area, f
z
its
, of each stand must be cut (salvage felling). This
mechanism simulates expected tree drop-outs caused by wind,
snow or insects, and is based on a hazard rate that is calculated
as a function of the leading tree species, the mixture condition s,
and the stand age (see Section 2.2.2). At every point in time, t,
the model decides for every stand, i, in addition to the determined
salvage returns, z
its
, whether it is more protable to realise the re-
turns of an (intermediate) thinning, d
its
, or those of a (nal) felling,
a
its
, as a portfolio option. The index, s, shows that the model must
also choose between two grading options for every individua l
stand in every period, which have different revenues and costs.
The optimizer can realize the thinning data (volumes, revenues
and costs) by assigning the stand areas or parts of it to be thinned
to the variables f
d
its
. The remainder of the stand area is then as-
signed to the variables f
a
its
that realizes the nal felling of the resid-
ual stand (volumes, revenues and costs).
The sum of the net present values (NPV) of all these net reve-
nues is the objective function that is to be optimized by the area
control method. The objective function has therefore the following
form:
max
f
Z
X
i
X
t
X
s
d
its
f
d
its
a
its
f
a
its
z
its
f
z
its
1 r
t
1
with the constraints,
X
s
f
d
it
0
s
X
t
0
t0
X
s
f
a
its
f
z
its
f
i
8i; t
0
2a
X
s
f
z
its
f
z
it
8i; t 2b
f
d;a;z
its
P0 8i; t; s 2c
The meaning of the symbols is as follows: r interest rate, t time, i
stand, s grading option, f
i
area of stand i, d
its
revenues per area from
thinning (net-of harvestin g costs) in stand i at time t using grading
option s,a
its
revenues per area from felling (net-of harvestin g costs),
z
its
revenues per area from salvage felling (net-of harvestin g costs),
f
d
its
thinning area, f
a
its
felling area, f
z
its
area of salvage felling. Con-
straint (2a) assures that for every point in time, t
0
, the sum of the
area felled to date plus the current area to be thinned is equal to
the stand area. This means that every area not yet felled is thinned
automatical ly. Constrain t (2b) ensures that the salvage felling area
in each period cannot be used as a thinning or nal felling option.
Constrain t (2c) prohibits solutions with negative areas.
This area allocation problem itself is modelled as an area control
scheme that allows stand areas to be shifted in space and time
using the modelling software AIMMS (Paragon Decision Technol-
ogy B.V., 2011 ). For every timber grading option there exists a sep-
arate scheme. The combination of both schemes is accomplis hed
using the constraints according to Eqs. (2a) and (2b). This approach
has the advantage that model and data are strictly separated, so
that it is quite simple to use data sets that do not rely upon the data
preparati on and evaluation module YAFO-EX. AIMMS symboliz es
the model in a tree structure. All model components are placed
in this tree as single objects. The objective functions as well as
the optimization problems are placed as objects in the model.
The former are categorized as variables in the AIMMS language,
the latter as mathematical programs. The connectio ns between
these objects are impleme nted through object declarations.
The area for each stand in all periods is dened by seven con-
straints. This set of constrain ts represents the side condition
accordin g to Eq. (2a) in the model as follows. For each period t
there is the following constrain t:
X
s
f
d
its
f
a
its
f
R
it
8i; t 3
with the recursive dened remaining area
f
R
itn
: f
R
it
n1
X
s
f
a
it
n1
s
f
z
its
4
After expanding the recursion the right side of Eq. (4) can be
combined in a different way:
f
R
itn
f
R
it
0
X
n1
x0
X
s
f
a
itxs
X
n
x1
X
s
f
z
itxs
f
i
f
z
it
0
X
n1
x0
X
s
f
a
itxs
X
n
x1
X
s
f
z
itxs
f
i
X
n1
x0
X
s
f
a
itxs
X
n
x0
X
s
f
z
itxs
5
Relinquis hing the counting index x for the different points in
time t in Eq. (5) leads to the simplied formulat ion
f
R
it
0 f
i
X
t
0
1
t0
X
s
f
a
its
X
t
0
t0
X
s
f
z
its
6
Substituti ng Eq. (3) into Eq. (6) gives
X
s
f
d
it
0
s
f
a
it
0
s
f
i
X
t
0
1
t0
X
s
f
a
its
X
t
0
t0
X
s
f
z
its
and nally after rearrange ment the structur e of Eq. (2a):
X
s
f
d
it
0
s
f
i
X
t
0
t0
X
s
f
a
its
X
t
0
t0
X
s
f
z
its
f
i
X
t
0
t0
X
s
f
a
its
f
z
its
7
So Eq. (3) with (4) and Eq. (2a) are identical.
Six additional constrain ts represent the salvage felling area con-
trol of Eq. (2b) for each period 05. The non-negativity constraint
(2c) is incorporate d directly into the variable declarations. Addi-
tionally the following ve biophysical constraints can be dened
at the enterprise level:
Lower limit of standing volume in (m
3
/ha)
Upper limit of standing volume in (m
3
/ha)
Maximum nal felling volume in (m
3
/ha/period)
Maximum nal felling area in (ha/period)
Maximum total felling volume in (m
3
/ha/period)
60 F. Hrtl et al. / Computers and Electronics in Agriculture 94 (2013) 5870
Again, six constraints are dened for each of these enterprise le-
vel parameters, separately for each period 05, to force the vari-
ables to the interval between the constrain ts. Period 6, as the
recovery basket, is affected only by the rst two constrain ts. For
this purpose the model updates and saves the biophysical develop-
ment of the stands. With the exception of the enterpris e-level con-
straints, the biophysical data do not affect the optimization
process. The main function of the biophysical data is to give the
user additional facts for management planning and to check the re-
sults. Carrying biophysi cal data as well as nancial data through
the model system enables the calculation of a timber amount that
follows the optimized planning solution for the forest enterprise.
The actual realised thinning volumes are calculated by multiplyi ng
the growth model-based thinning volumes by the thinning areas.
Similarly, the felling volumes are calculated by multiplyi ng the
simulated stand volume by the felling area. The volume of the
stand after thinning is computed by multiplying the simulated
stand volume by the difference between the total stand area and
area already used.
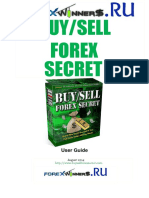
The spreadsheet calculation YAFO-EX prepares the data so that it
can be imported by the optimizer model YAFO-A (Fig. 1). Section 3.1
describes the data YAFO-EX requires as an input. The stands are
assigned to one of four categories representi ng hardwood and soft-
woods in pure and mixed stands. Using survival functions, age
depende nt drop-out partial areas due to calamities are calculated
for every stand in each period. The timber volume is classied for
further analysis by the main tree groups spruce, pine, beech and
oak, and by the main classes saw log, industria l wood, fuel wood
(from compact wood) and brushwood. The brushwood amounts
are reduced by a exploitation factor which is chosen by the user
in order to calculate economically usable amounts. Regeneration
costs provided by a separate data sheet are added to each stand.
Finally, in order to calculate the NPVs, an interest rate must be
entered.
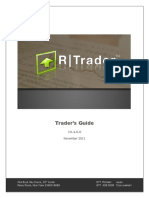
The data processing described above is controlle d by the user
through buttons provided in a central control sheet (Fig. 2). The
buttons are associated with VBA codes that activate the pro-
grammed command s, so that the handling is quite straightforwar d.
Through a series of processing steps, the data set is rearranged to
match the matrix format used by the area control scheme in the
model, with the stands in rows, and the periods in columns. The
name manager of Excel is used to assign name spaces to the data.
The I/O interface of YAFO-A accesses these names to assign the
model paramete rs to the appropriate data as listed in Section 3.1
Fig. 1. Flowchart of YAFO-EX and YAFO-MC (dashed box).
F. Hrtl et al. / Computers and Electronics in Agriculture 94 (2013) 5870 61
(see also Fig. 3). The central control sheet also provides additional
buttons to activate the Monte Carlo simulation, YAFO-MC, that cal-
culates the spreading of the potential NPV of each stand in each
period by simulating the variations described in Section 2.2.2,
and derives variation coefcents and correlation matrices. After it
is computed, the risk data is written back to YAFO-EX (see
Fig. 1). Section 3.1 gives a list of the data the solution contains.
In addition to performing these preparatory work, YAFO-EX
evaluates the optimized results (see Fig. 1). For that purpose,
YAFO-A uses the I/O interface to export its solution back to
YAFO-EX. Based on this, YAFO-EX provides summaries illustrating
the progress of the stock, the harvest volumes, the NPVs, the felling
values, value increments and area distribut ion of the stand devel-
opment classes.
2.2. Risk integration
2.2.1. Value at risk and risk utility
To incorporate the risk effects already mentioned, the objective
function (1) must be expanded. For this purpose, certainty equiva-
lents that are derived from utility functions (Gerber and Pafumi,
1998; Bamberg et al., 2008 ) can be used, for example. Alternatively ,
minimum values according to the Maximin decision rule can be
optimized (Young, 1998; Hildebrandt and Knoke, 2009; Hilde-
brandt and Knoke, 2011 ). As the worst case scenario for a given
objective is normally very unlikely and therefore can be considered
irrelevant, or as is the case of a continuous distribution function
the probability of this worst case approaches zero, it makes sense
to focus on a dened threshold that is exceeded with a given prob-
ability (Mowrer, 2000 ). Such a limit is nothing other than a certain
quantile of the risk-driven probability function of the objective. In
nance this concept is well known as the value at risk (VAR)
(Stambaugh, 1996; Jorion, 1997; Knoke et al., 2012 ). If the realisa-
ble net revenues d, a and z from thinnings and (salvage) fellings are
distributed by risk effects and interpreted as expected values with
statistical spreads, the expected value of the objective Z is distrib-
uted as well. F
Z
represents the distribut ion function of that risk-dri-
ven objective function Z. The related inverse function F
1
Z
p then
denes the p-quantile of F
Z
, the value, that is exceeded by Z with
a probability of 1 p. The new objective is as follows:
max
f
Z F
1
Z
p 8
Thus, the objective no longer optimizes the uncertain expected
value of Z but instead, the worst value for Z that can be expected
with a certain probabili ty of 1 p. The assumption of a Gaussian
distribut ion
Z N EZ; s
2
Z
F
Z
9
denes this distribution by the expected value E(Z) and the variance
s
2
Z
. Using this precond ition, F
1
can be calculate d as the inverse of a
normal distribu tion.
Another approach to handling risk effects is the use of utility
functions that reduce the expected return with a weighted vari-
ance according to the assumed risk aversion of the manager. In this
case the objective function can be written as a certainty
equivalent:
max
f
Z EZ
a
2
s
2
Z
10
Here a is a constant, represe nting the absolut e risk aversion of the
decision -maker.
If the decision-ma ker behaves as a risk-seeker, this can be easily
modelled with both approaches. In the case of Eq. (8) it is possible
to optimise other p-quantiles. A p-quanti le of 0.5 represents a risk-
neutral behavior, whereas p-quantiles above 0.5 correspond to
risk-seek ing managemen t decisions. In Eq. (10) a negative a can
be used to simulate a risk-seeking behavior.
2.2.2. Risk simulation by Monte Carlo
The two parameters E(Z) and s
2
Z
, that are needed for the deter-
mination of the distribution function can be estimated, for exam-
ple, from local experience. But the model presented uses a
different approach : The parameters are estimated based on real
data by use of the integrated Monte Carlo (MC) module, YAFO-
MC, prior to the optimization process. The Monte Carlo simulation
is implemented as Visual Basic (VBA) code in a separate Excel le
that is linked to YAFO-EX. For both grading options, a separate
MC module is provided. The modules generate, by default, 1,000
possible proceeds and costs for every stand and period each cal-
culated as a NPV sum of discounted net revenues from the possible
Fig. 2. Screenshot of the YAFO-EX central control sheet.
62 F. Hrtl et al. / Computers and Electronics in Agriculture 94 (2013) 5870
nal felling in that single period and the thinnings and salvage fel-
lings done thus far, by randomly modifying the evaluated growth
simulator data (see Fig. 1) by a mechanism for timber price uctu-
ation and another one for calamity occurence. Using the nomencla-
ture of Pritsker (1997), this approach is a full Monte Carlo method,
as each draw is based on exact pricing.
Timber price uctuations are treated as a random variable. For
each simulation step there is a randomly chosen year between
1975 and 2010 that is associated with that step. That year number
denes factors that weight the returns in this period using simple
multiplication. There are two different factors for hard and soft-
wood. These factors are calculated from the timber price statistics
published for the Bavarian state forest, and denote the percent
deviation of that years timber prices from the average price during
the time horizon mentioned. All prices are adjusted for ination.
The prices are derived from two chief timber grades average
quality spruce timber, diameter class 2529 cm, for softwood,
and average quality beech, diameter class 4049 cm, for hardwood.
Ination is estimated based on the so-called Long Series of the
German consumer price index (DESTATIS, 2011 ).
To randomize the appearance of a calamity this aspect is mod-
elled here in a different way as in the optimizer model YAFO-A.
Not average ratios of salvage areas per period are used but a ran-
dom number between 0 and 1 is picked for every stand. In each
period one calamity is possible in every stand, and there can be just
one calamity for each stand during the simulated time horizon.
This random number is compared to the hazard rate computed
for the single stand. If the random number exceeds the hazard rate,
the calamity occurs. The stand is then felled as a whole and a new
stand generation is planted. The hazard rate is calculated using
survival functions accordin g to Griess et al. (2012). The change of
the survival function st e
t
b
a
during a given period in time h,
with respect to the initial state, denes the hazard rate a(t):
at
st st h
st h
11
Different empirically derived values for a and b are determined
for each of four stand types pure and mixed softwood stands as
well as pure and mixed hardwood stands. Returns due to calami-
ties are reduced with a calamity factor which is chosen by the user.
The associated salvage fellings are considered prior to regular fel-
lings in each period.
2.2.3. Risk evaluation
The 1000 simulation runs generate 1000 possible NPVs for
every stand in each period and each grading option. These NPVs
are saved for each period. From this data, a correlation matrix is
calculated between the uncertain NPVs as well as a variation coef-
Fig. 3. Flowchart of YAFO-A.
F. Hrtl et al. / Computers and Electronics in Agriculture 94 (2013) 5870 63
cient for each stand. It is possible to do this either at the stand le-
vel or to combine the stands to groups for this purpose. In the latter
case, the distribution of the average values for each group is calcu-
lated. To do this, YAFO-A requires a group attribute for each stand
(see Section 3.1). As the standard option in YAFO-EX, nine groups
are used (spruce, r, pine, larch, douglas r, beech, oak, valuable
hardwood, other hardwood).
Let b
gts
represent a vector containing the possible realisatio ns of
the uncertain NPV in period t and grading option s for the dened
stand group g = 1, 2, . . . , n. Then every matrix K
ts
, with periods
t = 0, 1, . . . , 6, contains the correlations between these vectors:
K
ts
:
corrb
1ts
; b
1ts
corrb
1ts
; b
nts
.
.
.
.
.
.
.
.
.
corrb
nts
; b
1ts
corrb
nts
; b
nts
0
B
B
@
1
C
C
A
12
The covariances V
xyts
are calculated for each period t and grad-
ing option s by multiplying the correlation coefcient K
xyts
between
two stands or groups x und y by the areas f
(d,a,z)
, used by the model
in x und y, by the variation coefcients v of the NPVs, and by the
NPVs d
0t
: d
t
(1 + r)
t
, a
0t
: a
t
(1 + r)
t
and z
0t
: z
t
(1 + r)
t
that
can be realised in the stands or groups, x and y. Thus, the covari-
ance matrices V
ts
have the following components:
V
xyts
: K
xyts
v
xts
v
yts
f
d
xts
d
0xts
f
a
xts
a
0xts
f
z
xts
z
0xts
f
d
yts
d
0yts
f
a
yts
a
0yts
f
z
yts
z
0yts
13
These covariance matrices are summed up by elements to cal-
culate the total variance
s
2
Z
X
x;y;t;s
V
xyts
14
of the objective function Z. The variance of the last period is divided
by ve to account for the fact that the model algorithm cannot dis-
tribute its decision s in this period forward into the future as can be
done in reality, because the model does not cover future periods.
The model can spread felling areas from period six to ve or four,
although the particula r stand might not have reached the NPV peak.
Taking the full varianc e of period six into the model causes an over-
estimated felling area in the precedi ng period, whereas reducing the
variance to zero lets the model try to avoid the fellings and to reach
the risk-free period six. The paramete risation of this factor must
balance these two opposing decisions in a reasonabl e way.
4
The expected value of Z, dened in Eq. (1), and the variance just
calculated dene the distribution function F
Z
, as shown in Eq. (9).
The inverse function F
1
Z
p to be maximised accordin g to Eq. (8),
is also dened. In the model, this function is not calculated as
the inverse of F
Z
but instead, a reduction factor is used. Assuming
a Gaussian distribution according to Eq. (9), the difference between
the expected value of the objective function EZ F
1
Z
0:5 and
the value at risk F
1
Z
p can be expressed in terms of multiples q
of the standard deviation s
Z
of Z. This multiplication factor, that
is equivalent to the desired value at risk quantile p, is equal to
the quantile q of the standardised normal distribut ion U(q), so that
U(q) = 1 p. Therefore, the objective function of Eq. (8) can be cal-
culated by
F
1
Z
p EZ qs
Z
: 15
Knoke and Wurm (2006) have shown that the spreading of re-
turns from forests follows a Gaussian distribution only in an
imperfect manner. Therefore, the optimizing model presented here
uses the Monte Carlo simulation mentioned to generate a more
realistic spreading of the uncertainty factors as a rst step. In the
following nonlinear objective function, this approach is then sim-
plied by describing this simulated spreading like a Gaussian one.
According to Beinhofer (2009), the quality of the predicted results
is not highly affected through this simplication, as long as con-
dence levels 1 p below 95% are used.
So, three optimization programs exist in YAFO-A (Fig. 3): A sim-
ple NPV maximisation (Eq. (1)) and two programs consideri ng risk:
value at risk VaR (Eq. (15)) and certainty equivalent CE (Eq. (10)).
All three problems are classied in AIMMS as nonlinear, although
the NPV maximisati on is actually linear. This is due to the fact that
AIMMS does not distinguish between variables
5
that are part of the
chosen objective function and those which are not. For all three
cases, AIMMS uses CONOPT (Consult ing and Developme nt A/S, xxxx;
Drud, 1994 ), a solver algorith m for nonlinear program s that search
for a local optimu m. Consequ ently, we dene subsets of variables
and constraints to constru ct a mathemat ical program that is able
to solve the NPV maximisation as a linear problem. Using these sub-
sets, a simplex algorith m can be applied to determine a global opti-
mum. The algorithm used in this case is the ILOG CPLEX solver (IBM
Corp., 2011 ).
The model also contains procedures (program code) that help
the user to automatize the process of solution nding. These proce-
dures can be initiated through buttons on the user interface
(Fig. 4). There are three main procedures that carry out the three
mathemati cal programs described above. In addition, to nd a glo-
bal optimum of the nonlinear problems , there is also a multi-sta rt
option. In multi-start mode, YAFO-A uses the multi-start module
included in AIMMS to search for an optimum, starting from the
20 best solutions that are calculated by 100 randomly selected
starting points. This search is repeated 10 times. For further details
about the multi-start module see Rinnooy Kan and Timmer (1987)
and Roelofs and Bisschop (2011).
3. Application and example
3.1. Data preparation
The users of our model must prepare their data in an Excel or
Calc sheet. To do so, the modular design of the model offers two
options. The users have the option of using the evaluation tool
YAFO-EX . This tool is designed to read stand data produced by for-
est growth simulators, simulate uncertainti es with the help of the
coupled Monte Carlo module YAFO-MC, and deliver these data sets
to the optimizer model. Alternativel y, they can use a data manipu-
lation of their own, as done by Hahn et al. (submitted for publica-
tion), and import the data directly to the optimizer YAFO-A via the
dened I/O Interface.
The spreadsheet le YAFO-EX uses a single sheet for each of the
two possible grading options, that must provide for each stand of
the investiga ted enterprise the following data structure line by
line:
Stand identier/number
Year or period
An identication for thinning data (year or period value) and
residual stand data (0)
Proceeds and cost per hectare (/ha)
4
A spruce dominated stand in Bavaria typically reaches the maximum NPV in
between 60 and 100 years. Forty years or eight periods are necessary to cover this
period. Therefore, seen from the poin t of period six, there are, eight future periods
missing in the model to determine the correc t point in time when the NPVs of the
stands existing in period six, are reaching the maximum. On average, eight of nine
stands in period six are not mature. The redu ction of the variance in period six
prevents the model to sprea d these non-mature stand areas into period ve.
5
In AIMMS every object that can be changed in the model is a variable.
64 F. Hrtl et al. / Computers and Electronics in Agriculture 94 (2013) 5870
Total volume of (compact) wood (m
3
/ha)
Volume of brushwood (m
3
/ha) (optional)
Dominant tree species
Stand age (years)
Wood volume of each timber grade class (m
3
/ha)
This data set is required for each period for the thinning and the
residual stand. For seven points in time, this implies 14 rows for
every stand in the data sheet. By entering additional data for
brushwood, the tool is able to calculate the capabilities for provid-
ing fuel wood amounts from brushwood . In order for these
amounts to be considered nancially, they must be included in
the expected proceeds and costs per ha.
The I/O interface of YAFO-A imports data from any Excel or Calc
sheet, and exports the solution as well. To ensure data is assigned
to the correct model objects, the cell areas in Excel or Calc must be
marked with dened names. YAFO-EX already provides these
name conventi ons. The following data is imported by YAFO-A:
Stand identier/number
Initial area of each stand (ha)
Initial age of each stand (years)
List of groups for stands grouping
Assignment of each stand to the groups
Thinning volumes for each stand, period and grading option
(m
3
/ha)
Stock volumes for each stand, period and grading option (m
3
/
ha)
NPV of proceeds and costs for each stand, period and grading
option from thinnings, fellings and salvage fellings (/ha)
Hazard rate of each stand in each period (%)
Correlation matrix for each period
Variation coefcents for each stand/group in each period
The following values are exported to the target solution le
(YAFO-EX as standard):
NPV sum ()
Value at risk ()
Certainty equivalent ()
Lists of areas used in each period and grading option by thin-
ning, salvage and nal felling (ha)
Covariance matrix for each period
3.2. Example
As an example we demonstrat e the application of YAFO on a
data set of inventory plots of the second German federal forest
inventory BWI 2 (BMVEL, 2005 ) that has been projected by the
growth simulator WEHAM (Bsch, 2004a,b ). For this purpose, the
growth simulator was set so that there was a possibility to thin
the stands but not to fell them nally, as the timing of the nal fell-
ing will be determined by our model. To calculate brushwood
amounts we used volume expansion factors according to Zell
(2008). The data set tested consists of 267 plots (satellite sample
plots as used in the inventory) that belong to the state forest of
the geographi cal region Tertires Hgelland in Bavaria. These
plots are considered as 267 stands of a forest enterprise, each rep-
resenting a stand of 1 ha. The data show a softwood-d ominated
tree species distribution with high standing timber volumes
(410 m
3
/ha) that are typical for this region. One hundred fty-six
of these 267 ha are covered by spruce-d ominated stands, and
Fig. 4. Graphical user interface (GUI) of YAFO-A.
F. Hrtl et al. / Computers and Electronics in Agriculture 94 (2013) 5870 65
52 ha are covered by beech. The other stands are dominated by
pine or other hardwoods. The growth simulator WEHAM has an
integrated grading function, so that, without the use of any addi-
tional programs, we obtain a graded result of the biophysical
developmen t of the stands. We compare two grading variants:
The rst scenario is meant to represent the actual grading practices
used in forestry at present, and emphasizes the material use of tim-
ber, with only moderate fuel wood amounts from small-sized
wood. The second scenario emphasizes the thermal use of wood,
by having minimum diameters for saw log and industrial wood
that are 12 cm larger than those used in the rst scenario. Using
a database of our own, these volumes are evaluated and trans-
formed to the data structure YAFO-EX requires. The assumed tim-
ber prices and costs of harvesting are shown in Table 1. The
harvesting costs for spruce are used for all softwood species, and
those for beech for all hardwood s. Fir prices are set 5 below,
and pine prices 20 below spruce. The prices for larch and douglas
r are set 10 above spruce. Beech prices are used for all hard-
woods except oak and low value hardwoods. Prices for oak are gi-
ven in the table. Low value hardwoods are priced at 5 below
beech.
The assumed regeneration costs are shown in Table 2. The
regeneration costs modication is implemented as a Weibull func-
tion following the form e
t
b
a
where t is the stand age and the two
parameters are dened as a : 70 and b : 5. The data used by
YAFO-EX to simulate volume and thinning amounts from ingrowth
are given in Table 3.
The factor to reduce net revenues from calamities as well as the
brushwood exploitati on factor are set to 0.5, the interest rate to 2%,
and the value at risk quantile to 5%. We do not introduce any fur-
ther constrain ts at the forest enterprise level. The risk simulation
through the Monte Carlo module is complete after approximat ely
10 min.
We optimize the 267-stand enterpris e in YAFO-A with and
without risk aspects. The linear program gives a global optimum
of 17,081 /ha for the NPV. The nonlinear optimization with risk ef-
fects is calculated using the multi-start option, resulting in the
solution of 14,690 /ha for the VAR (NPV at 17,001 /ha). The sum-
mary results for the timber production of the model enterprise are
shown in Tables 4 and 5.
The data in the tables are aggregated to the enterprise level and
displays logging volumes, area development and nancial results.
This data can be used for supporting the decisions of the forest
manager. It is possible to retrace this data to the single stands.
So an operational felling plan in terms of a stand list can be pro-
vided for the manager.
4. Discussion
4.1. Model
The main focus of YAFO is the economic analysis of felling sce-
narios when making decisions based primarily on nancial values.
Many other approaches are also capable of calculating nancial
values, but either do not provide the possibility to consider them
as decision variables (for example LMS/FVS , DSD, FTM, 4S TOOL,
AFFOREST), or do not integrate all risk aspects nancial as well
as natural ones (for example HEUREKA, SIMO, DSD, NED-2).
YAFO, however, provides the consideration of (biophysical) restric-
tions in the solution process, so that it is possible to implement
ecological and social barriers, at least to the extent that they can
be expressed using such constraints. For example, in order to main-
tain a certain level of ecosystem services (e. g. recreation, water
conservation) there can be the additional objective to maintain a
specic minimal average timber volume within the forest enter-
prise. To do so, it is easily possible to formulat e a nal timber vol-
ume that must be remain at the end of the investigated
managemen t period.
In contrast to most other approaches, YAFO does not use linear
programm ing or heuristic algorithms to solve the decision prob-
lem, but rather NLP techniques. The advantag e of this method over
linear models is that the risk aspects mentioned above can be eas-
ily integrated. The uncertainties included in the YAFO model cover
risks due to timber price uctuations, as well as calamity probabil-
ities, and their relationship to species mixture. Unlike further ex-
tended framewor ks of uncertainty (Williams, 2012 ), the model
assumes that the objectives are known and accepted. In NLP it is
possible to determine an optimal solution by using solver algo-
rithms for global optima, or as in our case by calculatin g it with
the help of advanced multi-start techniques. In contrast, heuristic
approach es can achieve only approximate solutions.
The spatially implicit nature of the model is achieved through
the consideration of the stands of the forest enterprise in the area
control scheme (Turner et al., 2001; Perry and Enright, 2007 ). This
approach fullls level 4 of spatial recognition, as dened by Davis
et al. (2001). Further spatial effects, such as direct interactions be-
tween stands are not considered , as the YAFO model does not in-
clude informat ion about the spatial arrangement of the stands, as
for example, SAGALP or HARVEST do.
The YAFO model is not designed as a monolithic solution with
an integrated growth simulator. Instead it is a modular tool to sup-
port managers of private and public forest land in their decisions .
YAFO can be easily adapted to existing growth simulators, due to
its open data interface. According to Reynolds (2005), it is argu-
able if optimization systems are real DSS (Rauscher et al., 2007 ).
YAFO certainly can be considered as a DSS component, based on
the denition by Holsapple (2003) of DSS as problem-proce ssing
systems supporting a decision-ma king process. According to the
denition given in Menzel et al. (2012), the tool can be recognized
either as a typical part of a DSS, or as a DSS in a wider sense. They
searched for criteria to merge the quantitat ive, analytical with the
qualitativ e, more participator y oriented approach, as differentiate d
by Reynolds et al. (2008). YAFO as a new, innovative, and algorith-
mic model complies with the eight criteria Menzel et al. (2012) de-
rived for evaluating a DSS from a participa tory planning
perspecti ve.
One potential weakness of the modular approach is the lack of
interactio n between optimization and growth simulation. The
growth prediction is not able to act in response to the thinning ac-
tions planned by the optimization. Thus, the thinnings used in the
nancial model are determined by and limited to the decisions
made by the growth simulation. The provision of such interactio ns
is still a big advantag e of the monolithic approach of other systems,
such as HEUREKA. However, due to the lack of a globally valid for-
est growth simulation, the ability of YAFO to use data from various
growth simulators represents a big advantage of the modular ap-
proach. Existing growth simulator s are parameterized for specic
regions. For example, SILVA has impleme nted growth functions
mainly for Bavaria, BWINPro for North West Germany, DSD for
southern Austria, LMS/FVS for the United States, SADfLOR for Por-
tugal, and HEUREKA for Sweden. Combining a universally valid
nancial model with a specic local/regional growth simulator
solution would inhibit a broader use of our system, as such all-
in-one solutions are usually not easily adaptable to other regional
(growth) conditions. Our target is to provide an open tool that can
be linked to different growth models. Although this design means a
higher workload for the users, as they must take care to appropri-
ate data import and export from one program to the other, in the
end it provides greater exibility (see e.g. Nute et al., 2005 ). The
example above shows that interaction with the WEHAM growth
simulator .
66 F. Hrtl et al. / Computers and Electronics in Agriculture 94 (2013) 5870
Another advantage to the YAFO model is its speed. The risk sim-
ulation through the Monte Carlo module is complete after approx-
imately 10 min, and the calculatio n time of YAFO-A is only about
2 min.
6
For two grading options, at six points in time across 267
stands, in which the model distingu ishes between thinning and fell-
ing actions as well as grading options for the salvage fellings, the
optimiza tion problem consists of 9612 independ ent decisio n vari-
ables and 6974 constraint s.
7
In total then, the model must calculate
about 39,000 variables. Our previous attempts using the Excel Add-
in, Whats Best (LINDO Systems Inc., 2011 ), for nonlinear program-
ming require d several hours of computa tion time and did not reach
feasible solutions in either case. The redesign of the model within
AIMMS is therefore a big step towards practicality .
4.2. Example
Analysing the solution for the risk-ignorin g linear NPV optimi-
zation one can see that the high initial average stand volume of
410 m
3
/ha is immediately reduced by a heavy harvestin g operation
of 19 m
3
/ha/a distributed across 33 ha of the enterprise area. This
decreases the timber incremen t to 11 m
3
/ha/a. The main reason
for this is the large percentage of high volume spruce stands in
age classes IV (6079 years) and V (8099 years) that have already
reached, or even exceeded, their nancially optimal rotation age.
The average volume is reduced during the following periods down
to 304 m
3
/ha in period ve. From this point it increases over the
next 5 years, ending at 349 m
3
/ha. A little bit more than one third
of the forest area (99 ha) is felled during the considered time
horizon.
In contrast, the harvests undertak en by the risk-sensitive vari-
ant are more equally distributed. The initial harvest amount is only
12 m
3
/ha/a, whereas the harvest volume in the subsequent periods
ranges between 11 and 14 m
3
/ha/a. In these periods, the risk-
ignoring variant harvested between 9 and 12 m
3
/ha/a. The total -
nal felling area of 90 ha is below the one in the rst case, while the
minimum average stand volume rises to 320 m
3
/ha, nally ending
at 367 m
3
/ha in period 6. The main reason for these results is that
the algorithm tries to arrange the harvesting activities in a more
evenly distributed fashion to avoid high risk effects. This is quite
clear in the developmen t of the area in spruce of age class V. The
risk-ignorin g variant reduces this age class through its rst harvest
action from 39 ha to 26 ha. In contrast, the value at risk optimiza-
tion distributes this reduction across four consecutive harvests, not
reaching a compara ble level of 28 ha remaining spruce until period
three 15 years later.
This equalizing tendency also affects the nancial results. While
the risk-free optimization allows a drop in periodical revenues
from an initial 689 /ha/a to 461 /ha/a including major uctua-
tions, the results of the value at risk variant are more continuous:
The maximum of 433 /ha/a in period zero is accompanied by a -
nal value of 533 /ha/a. Although the revenues reduce to 376 /ha/
a in period two, this minimum exceeds the minimum of the NPV
variant (294 /ha/a) by 82 /ha/a. The results thus show that deal-
ing with risks in a forest enterprise planning process leads to a
more equally distributed logging plan, and therefore allows the
owner to benet from a more balanced ow of net revenues.
Another result can be seen by analysing how the timber har-
vested is split up between the two grading options. In both optimi-
zation approaches, about 10% of the timber is graded according to
the fuel wood scenario. This timber comes from the younger hard-
wood stands, because it is more protable to grade these small-
sized hardwoods as fuel wood and sell them, for example, via con-
tract felling than for the owner to conduct the harvest and sell
them as saw logs (refer to the assumed price scenario in Table 1).
Table 1
Income revenue over harvesting cost for spruce and beech.
Species Diameter
class (cm)
Avg. price
(/m
3
)
Harvesting costs
(/m
3
)
Income revenue
(/m
3
)
Spruce 614 40 21 19
1519 47 22 25
2024 59 20 39
2529 64 19 45
3034 64 18 46
3539 61 17 44
4044 60 16 44
P45 60 17 43
Industrial
wood
40 21 19
Fuel wood 10 0 10
Beech 614 40 26 14
1519 42 25 17
2024 44 22 22
2529 44 21 23
3034 49 19 30
3539 62 18 44
4044 72 16 56
4549 72 16 56
5054 80 18 62
P55 84 18 66
Industrial
wood
40 26 14
Fuel wood 20 0 20
Oak 614 40 26 14
1519 40 25 15
2024 40 22 18
2529 58 21 37
3034 76 19 57
3539 103 18 85
4044 140 16 124
4549 140 16 124
5054 164 18 146
P55 174 18 156
Industrial
wood
40 26 14
Fuel wood 20 0 20
Table 2
Regeneration costs.
Tree species Costs (/ha)
Beech 6400
Valuable hardwood 5225
Other hardwood 4895
Oak 8250
Spruce 1600
Fir 2700
Douglas r 3958
Pine 3630
Larch 1400
Table 3
Young stand data of thinning and volume growth.
Tree species Age (years) Thinning (m
3
) Volume (m
3
)
Softwood 20 15 40
25 20 60
30 30 100
Hardwood 20 0 10
25 5 25
30 10 40
6
We used a PC with an Intel Core i5-2400 CPU and 3.1 GHz.
7
7 267 for every stand, plus 6 267 for the salvage felling, plus non-negativity
constraints of the same size, plus 32 optiona l biophysical constraints at the enterprise
level.
F. Hrtl et al. / Computers and Electronics in Agriculture 94 (2013) 5870 67
Having the exibility to grade simultaneously in two ways is one of
the key strengths of the model. Of particular advantage in our ap-
proach is the opportunity to compare two grading variants not
just by means of their total NPV or value at risk but also to be
able to analyse such gradual shifts between the grading options
at the individual stand level.
5. Summary
The goal of the developmen t of the YAFO optimization model is
to provide a planning-sup port tool that can be easily adopted for
risk neutral, risk averse and risk-seeking decision makers, as well
as to a wide variety of problems . Therefore it sets a high value
on the strict division between model representation and data man-
agement . We use commercially available software that can usually
be acquired with low costs at least for the research sector. The
modular concept including dened interfaces between the mod-
ules allows for the combination of the users data in different
ways within the model: Either a graded and valuated data set via
the Excel tool YAFO-EX (for example, for processed data from
growth simulators), or a set of coefcients with separate risk eval-
uation (correlation matrices and variation coefcients) for direct
import into the optimizer, YAFO-A, can be used. The use of the
Monte Carlo module, YAFO-MC, is optional, as the system can han-
dle nonlinear problems with uncertainty evaluations as well as
simple linear problems. The model can also distingui sh between
two grading options. The version of the tool presente d here is inde-
pendent of the number of stands that need to be investiga ted. One
current limitation is the number of periods in time that can be con-
sidered. The ability to nd local or global optima for nonlinear
problems is not a question of the presente d model but of the solver
the users apply in their AIMMS system. As AIMMS provides an
open interface for that reason, it is possible to combine our model
with different solver algorithms.
The example shown performs as expected: Both the periodica l
biophysi cal and nancial results occur more smoothly when the
optimizati on considers uncertainties due to risk effects. Another
interesting result is the response to the two different grading op-
tions. As described , this decision is made by the model at the indi-
vidual stand level. In the future, it might be helpful to examine this
effect in greater detail. Thus, the model may enable us to analyse
the behaviou r of forest owners in response to various timber price
scenarios. For example, it would be valuable to investiga te how
timber amounts shift between the material and thermal-use tim-
ber grades under the assumption of increasing prices for fuel wood
that are likely given the expected continued increase in oil prices.
Acknowled gements
The study presente d here is part of the Project G33 Competi-
tion for wood: Ecological , social and economic effects of the mate-
rial and energetic utilization of wood funded by the Bavarian State
Ministry of Food, Agriculture and Forestry, and as Project
22009411 by the German Federal Ministry of Food, Agriculture
and Consumer Protection. The authors wish to thank Laura Carlson
and Yolanda Wiersma for the language editing of the manuscript
and two anonymous reviewer s for valuable suggestions.
References
Alonso-Ayuso, A., Escudero, L.F., Guignard, M., Quinteros, M., Weintraub, A., 2011.
Forestry management under uncertainty. Annals of Operations Research 190,
1739.
Alvarez, L.H.R., Koskela, E., 2006. Does risk aversion accelerate optimal forest
rotation under uncertainty? Journal of Forest Economics 12, 171184.
Andersson, M., Dahlin, B., Mossberg, M., 2005. The forest time machinea multi-
purpose forest management decision-support system: decision support
systems for forest management decision support in multiple purpose forestry.
Computers and Electronics in Agriculture 49, 114128.
ARKI Consulting and Development A/S, . CONOPT. 3
Bamberg, G., Coenenberg, A.G., Krapp, M., 2008. Betriebswirtschaftliche
Entscheidungslehre, 14th ed. Vahlen, Mnchen.
Baskent, E.Z., Keles, S., 2005. Spatial forest planning: a review. Ecological Modelling
188, 145173.
Beinhofer, B., 2009. Anwendung der Portfoliotheorie in der Forstwissenschaft
Finanzielle Optimierungsanstze zur Bewertung von Diversikationseffekten.
Ph.D. Thesis. Technische Universitt Mnchen.
Benjamin, L.R., Milne, A.E., Parsons, D.J., Cussans, J., Lutman, P.J.W., 2009. Using
stochastic dynamic programming to support weed management decisions over
a rotation. Weed Research 49, 207216.
Bettinger, P., 2009. Forest Management and Planning. Academic Press/Elsevier,
Amsterdam and Boston.
Bettinger, P., Chung, W., 2004. The key literature of, and trends in, forest-level
management planning in North America, 19502001. International Forestry
Review 6, 4050.
Table 4
Results of the forest enterprise optimization without considering uncertainties.
Period 0 1 2 3 4 5 6 Avg.
Initial stock (m
3
/ha) 410 372 376 370 378 366 349 375
Remaining stock (m
3
/ha) 317 319 317 327 319 304 349 322
Regular felling (m
3
/ha/a) 18 10 11 8 11 12 0 12
Salvage felling (m
3
/ha/a) 1 1 1 1 1 1 0 1
Total felling (m
3
/ha/a) 19 11 12 9 12 12 0 12
Increment (m
3
/ha/a) 11 11 11 10 9 9 10
Areas (ha)
Intermediate felling 234 220 205 197 184 168
Final felling 29 12 13 7 12 14
Salvage felling 4 2 2 2 2 2
Regeneration 33 47 62 70 83
Sum 267 267 267 267 267 267
Logging volume (m
3
/ha/a)
Saw log 15 8 9 6 9 9 9
Industrial wood 2 2 2 2 2 2 2
Firewood 2 1 1 1 1 1 1
Brush rewood 2 1 1 1 1 1 1
Prot (/ha/a)
Intermediate felling 203 144 160 173 187 189
Final felling 473 217 260 115 248 263
Sum regular felling 676 362 420 288 434 452
Salvage felling 13 7 6 6 7 8
Sum 689 368 426 294 441 461
Table 5
Results of the forest enterprise optimization maximising the value at risk.
Period 0 1 2 3 4 5 6 Avg.
Initial stock (m
3
/ha) 411 408 405 407 407 390 367 399
Remaining stock (m
3
/ha) 350 345 350 353 341 320 367 347
Regular felling (m
3
/ha/a) 12 12 10 10 12 13 0 11
Salvage felling (m
3
/ha/a) 1 1 1 1 1 1 0 1
Total felling (m
3
/ha/a) 12 13 11 11 13 14 0 12
Increment (m
3
/ha/a) 12 12 11 11 10 9 11
Areas (ha)
Intermediate felling 254 236 224 211 195 177
Final felling 9 14 10 10 13 15
Salvage felling 4 3 3 3 3 2
Regeneration 13 31 43 56 72
Sum 267 267 267 267 267 267
Logging volume (m
3
/ha/a)
Saw log 9 10 8 8 10 11 9
Industrial wood 2 2 2 2 2 2 2
Firewood 1 1 1 1 1 1 1
Brush rewood 1 1 1 1 1 1 1
Prot (/ha/a)
Intermediate felling 210 152 172 188 201 199
Final felling 210 278 196 186 282 323
Sum regular felling 420 430 368 374 483 523
Salvage felling 13 11 8 8 9 10
Sum 433 441 376 383 491 533
68 F. Hrtl et al. / Computers and Electronics in Agriculture 94 (2013) 5870
Bjrndal, T., Herrero, I., Newman, A., Romero, C., Weintraub, A., 2012. Operations
research in the natural resource industry. International Transactions in
Operational Research 19, 3962.
BMVEL, 2005. Die zweite Bundeswaldinventur BWI 2: Der Inventurbericht.
Borges, J.G., Falcao, A., Miragaia, C., Marques, P., Marques, M., 2003. A decision
support system for forest resources management in Portugal. In: Arthaud, G.J.,
Barrett, T.M. (Eds.), System Analysis in Forest Resources, vol. 7. Kluwer
Academic Publishers, Dordrecht, pp. 155164.
Bsch, B., 2004a. Benutzeranleitung WEHAM: Waldentwicklungs- und
Holzaufkommensmodellierung Version 1.14.
Bsch, B., 2004b. WEHAM II: Modelle und Algorithmen.
Brazee, R., Mendelsohn, R., 1988. Timber harvesting with uctuating prices. Forest
Science 34, 359372.
Buongiorno, J., Gilless, J.K., 2003. Decision Methods for Forest Resource
Management. Academic Press, Amsterdam and Boston Mass.
Chen, B.W., Gadow, K.v., 2002. Timber harvest planning with spatial objectives,
using the method of simulated annealing. Forstwissenschaftliches Centralblatt
121, 2534.
Cotta, H., 1804. Systematische Anleitung zur Taxation der Waldungen. J.D. Sander,
Berlin.
Crookston, N.L., Dixon, G.E., 2005. The forest vegetation simulator: a review of its
structure, content, and applications: decision support systems for forest
management decision support in multiple purpose forestry. Computers and
Electronics in Agriculture 49, 6080.
Davis, L.S., Johnson, K.N., Bettinger, P., Howard, T.E., 2001. Forest Management: To
Sustain Ecological, Economic, and Social Values, fourth ed. Waveland Press,
Long Grove Ill.
DESTATIS, 2011. Verbraucherpreisindex fr Deutschland: Lange Reihen ab 1948.
Diaz-Balteiro, L., Romero, C., 2008. Making forestry decisions with multiple criteria:
a review and an assessment. Forest Ecology and Management 255, 32223241.
Dieter, M., 2001. Land expectation values for spruce and beech calculated with
Monte Carlo modelling techniques: Faustmann formula: applications and
extensions. Forest Policy and Economics 2, 157166.
Drud, A., 1994. CONOPT a large-scale GRG code. ORSA Journal on Computing 6,
207.
Duraiappah, A.K., 2005. Ecosystems and Human Well-being: Biodiversity Synthesis;
A Report of the Millennium Ecosystem Assessment. World Resources Inst.,
Washington, DC.
Eriksson, L.O., 2006. Planning under uncertainty at the forest level: a systems
approach. Scandinavian Journal of Forest Research. 21, 111117.
Felbermeier, B., Knoke, T., Mosandl, R., 2007. Forstbetriebsplanung untersttzen
durch lineare Programmierung. Allgemeine Forst- und Jagdzeitung, 115116.
Fonseca, T.F., Cerveira, A., Fonseca, T.F., 2012. An integer programming model for a
forest harvest problem in Pinus pinaster stands. Forest Systems, 21.
Forsell, N., Wikstrm, P., Garcia, F., Sabbadin, R., Blennow, K., Eriksson, L.O., 2011.
Management of the risk of wind damage in forestry: a graph-based Markov
decision process approach. Annals of Operations Research 190, 5774.
Georgiou, P.E., Papamichail, D.M., 2008. Optimization model of an irrigation
reservoir for water allocation and crop planning under various weather
conditions. Irrigation Science 26, 487504.
Gerber, H.U., Pafumi, G., 1998. Utility functions: from risk theory to nance. North
American Actuarial Journal 2, 74100.
Gilliams, S., van Orshoven, J., Muys, B., Kros, H., Heil, G., van Deursen, W., 2005.
AFFOREST sDSS: a metamodel based spatial decision support system for
afforestation of agricultural land. New Forests 30, 3353.
Glawischnig, M., Seidl, I., 2011. Portfolio optimization with serially correlated,
skewed and fat tailed index returns. Central European Journal of Operations
Research, 124.
Gong, P., 1998. Risk preferences and adaptive harvest policies for even-aged stand
management. Forest Science 44, 496506.
Griess, V.C., Acevedo, R., Hrtl, F., Staupendahl, K., Knoke, T., 2012. Does mixing tree
species enhance stand resistance against natural hazards? A case study for
spruce. Forest Ecology and Management 267, 284296.
Gustafson, E.J., Rasmussen, L.V., 2002. Assessing the spatial implications of
interactions among strategic forest management options using a Windows-
based harvest simulator. Computers and Electronics in Agriculture 33, 179196.
Gustafson, E.J., Roberts, L.J., Leefers, L.A., 2006. Linking linear programming and
spatial simulation models to predict landscape effects of forest management
alternatives. Journal of Environmental Management 81, 339350.
Hahn, A., Hrtl, F., Irland, L.C., Kohler, C., Moshammer, R., Knoke, T., submitted for
publication. Financially optimized management planning under risk aversion
results in even-ow sustained timber yield. Journal of Environmental
Management.
Hahn, A., Knoke, T., 2010. Sustainable development and sustainable forestry:
analogies, differences, and the role of exibility. European Journal of Forest
Research 129, 787801.
Haight, R.G., 1990. Feedback thinning policies for uneven-aged stand management
with stochastic prices. Forest Science 36, 10151031.
Hanewinkel, M., Hummel, S., Albrecht, A., 2011. Assessing natural hazards in
forestry for risk management: a review. European Journal of Forest Research
130, 329351.
Hartig, G.L., 1795. Anweisung zur Taxation der Forste oder zur Bestimmung des
Holzertrags der Wlder: Ein Beytrag zur hheren Forstwissenschaft. Heyer,
Gieen.
Heinimann, H.R., 2010. A concept in adaptive ecosystem managementan
engineering perspective: adaptation of forests and forest management to
changing climate selected papers from the conference on Adaptation of forests
and forest management to changing climate with emphasis on forest health: a
review of science, policies and practices, Umea , Sweden, August 2528, 2008.
Forest Ecology and Management 259, 848856.
Hildebrandt, P., Knoke, T., 2009. Optimizing the shares of native tree species in
forest plantations with biased nancial parameters. Ecological Economics 68,
28252833.
Hildebrandt, P., Knoke, T., 2011. Investment decisions under uncertaintya
methodological review on forest science studies. Forest Policy and Economics
13, 115.
Hof, J.G., Kent, B.M., 1990. Nonlinear programming approaches to multistand timber
harvest scheduling. Forest Science 36, 894907.
Holsapple, C.W., 2003. Decision support systems. In: Bidgoli, H. (Ed.), Encyclopedia
of lnformation Systems, vol. 1. Academic Press, Boston MA, pp. 551565.
IBM Corp., 2011. ILOG CPLEX.
Janov, J., 2012. Crop planning optimization model: the validation and verication
processes. Central European Journal of Operations Research 20, 451462.
Jorion, P., 1997. Value at Risk: The New Benchmark for Controlling Market Risk.
Irwin, Chicago.
Kangas, A.S., Kangas, J., 2004. Probability, possibility and evidence: approaches to
consider risk and uncertainty in forestry decision analysis. Forest Policy and
Economics 6, 169188.
Kirilenko, A., Chivoiu, B., Crick, J., Ross-Davis, A., Schaaf, K., Shao, G., Singhania, V.,
Swihart, R., 2007. An Internet-based decision support tool for non-industrial
private forest landowners: modelling, computer-assisted simulations, and
mapping of dangerous phenomena for hazard assessment. Environmental
Modelling & Software 22, 14981508.
Knoke, T., Moog, M., 2005. Timber harvesting versus forest reservesproducer prices
for open-use areas in German beech forests (Fagus sylvatica L.). Ecological
Economics 52, 97110.
Knoke, T., Moog, M., Plusczyk, N., 2001. On the effect of volatile stumpage prices on
the economic attractiveness of a silvicultural transformation strategy. Forest
Policy and Economics 2, 229240.
Knoke, T., Schneider T., Hahn A., Griess, V.C., Riger J., 2012. Forstbetriebsplanung
als Entscheidungshilfe, rst ed. Ulmer, Stuttgart.
Knoke, T., Stimm, B., Ammer, C., Moog, M., 2005. Mixed forests reconsidered: a
forest economics contribution on an ecological concept. Forest Ecology and
Management 213, 102116.
Knoke, T., Stimm, B., Weber, M., 2008. Tropical farmers need productive
alternatives. Nature 452, 934.
Knoke, T., Wurm, J., 2006. Mixed forests and a exible harvest policy: a problem for
conventional risk analysis? European Journal of Forest Research 125, 303315.
Konno, H., Yamazaki, H., 1991. Mean-absolute deviation portfolio optimization
model and its applications to Tokyo stock market. Management Science 37,
519531.
Kouba, J., 2002. Das Leben des Waldes und seine Lebensunsicherheit.
Forstwissenschaftliches Centralblatt 121, 211228.
Lmas, T., Eriksson, L.O., 2003. Analysis and planning systems for multiresource,
sustainable forestry: the Heureka research programme at SLU. Canadian Journal
of Forest Research 33, 500508.
Lexer, M.J., Vacik, H., Palmetzhofer, D., Oitzinger, G., 2005. A decision support tool to
improve forestry extension services for small private landowners in southern
Austria: decision support systems for forest management decision support in
multiple purpose forestry. Computers and Electronics in Agriculture 49, 81
102.
LINDO Systems Inc., 2011. Whats Best.
Liu, G., Nelson, J.D., Wardman, C.W., 2000. A target-oriented approach to forest
ecosystem designchanging the rules of forest planning. Ecological Modelling
127, 269281.
Markowitz, H.M., 1952. Portfolio selection. The Journal of Finance, 7791.
Markowitz, H.M., 1959. Portfolio selection: efcient diversication of investments.
Monographs/Cowles Foundation for Research in Economics at Yale University,
vol. 16. Wiley & Sons, New York, NY.
Martell, D.L., Gunn, E.A., Weintraub, A., 1998. Forest management challenges for
operational researchers. European Journal of Operational Research 104, 117.
Mathey, A.H., Krcmar, E., Dragicevic, S., Vertinsky, I., 2008. An object-oriented
cellular automata model for forest planning problems. Ecological Modelling
212, 359371.
Mathey, A.H., Krcmar, E., Vertinsky, I., 2005. Re-evaluating our approach to forest
management planning: a complex journey: the forestry chronicle. The Forestry
Chronicle. 81, 359364.
Mathey, A.H., Nelson, H., 2010. Assessing forest management strategies under a
mountain pine beetle attack in Alberta: exploring the impacts. Canadian Journal
of Forest Research 40, 597610.
McCarter, J.B., Wilson, J.S., Baker, P.J., Moffett, J.L., Oliver, C.D., 1998. Landscape
management through integration of existing tools and emerging technologies.
Journal of Forestry 96, 1723.
Meilby, H., Strange, N., Thorsen, B.J., 2001. Optimal spatial harvest planning under
risk of windthrow. Forest Ecology and Management 149, 1531.
Mendoza, G.A., 2005. Recent developments in decision analysis for forest
management. In: Innes, J.L., Hickey, G.M., Hoen, H.F. (Eds.), Forestry and
Environmental Change, vol. 5. New York, NY and CABI Pub. and in Association
with the International Union of Forestry Research Organizations, Wallingford
and UK and Vienna and Austria, pp. 239256.
Menzel, S., Nordstrm, E.M., Buchecker, M., Marques, A., Saarikoski, H., Kangas, A.S.,
2012. Decision support systems in forest management: requirements from a
F. Hrtl et al. / Computers and Electronics in Agriculture 94 (2013) 5870 69
participatory planning perspective. European Journal of Forest Research 131,
13671379.
Mermet, L., Farcy, C., 2011. Contexts and concepts of forest planning in a diverse and
contradictory world. Forest Policy and Economics 13, 361365.
Mills, W.L.J., Hoover, W.L., 1982. Investment in forest land: aspects of risk and
diversication. Land Economics 58, 33.
Mosquera, J., Henig, M.I., Weintraub, A., 2011. Design of insurance contracts using
stochastic programming in forestry planning. Annals of Operations Research
190, 117130.
Mowrer, H.T., 2000. Uncertainty in natural resource decision support systems:
sources, interpretation, and importance. Computers and Electronics in
Agriculture 27, 139154.
Nute, D., Potter, W.D., Cheng, Z., Dass, M., Glende, A., Maierv, F., Routh, C., Uchiyama,
H., Wang, J., Witzig, S., Twery, M., Knopp, P., Thomasma, S., Rauscher, H.M.,
2005. A method for integrating multiple components in a decision support
system: decision support systems for forest management decision support in
multiple purpose forestry. Computers and Electronics in Agriculture 49, 4459.
Paragon Decision Technology B.V., 2011. AIMMS: Advanced Interactive
Multidimensional Modeling System.
Perry, G.L.W., Enright, N.J., 2007. Contrasting outcomes of spatially implicit and
spatially explicit models of vegetation dynamics in a forestshrubland mosaic.
Ecological Modelling 207, 327338.
Pritsker, M., 1997. Evaluating value at risk methodologies: accuracy versus
computational time. Journal of Financial Services Research 12, 201242.
Pukkala, T., Kangas, J., 1996. A method for integrating risk and attitude toward risk
into forest planning. Forest Science 42, 198205.
Pukkala, T., Kellomki, S., 2012. Anticipatory vs adaptive optimization of stand
management when tree growth and timber prices are stochastic. Forestry 85,
463472.
Pyatt, D.G., Ray, D., Fletcher, J., 2001. An Ecological Site Classication for Forestry in
Great Britain.
Rasinmki, J., Mkinen, A., Kalliovirta, J., 2009. SIMO: An adaptable simulation
framework for multiscale forest resource data. Computers and Electronics in
Agriculture 66, 7684.
Raunikar, R., Buongiorno, J., Turner, J.A., Zhu, S., 2010. Global outlook for wood and
forests with the bioenergy demand implied by scenarios of the
intergovernmental panel on climate change: forest sector models and their
application. Forest Policy and Economics 12, 4856.
Rauscher, H.M., 2005. Decision-support systems for forest management: editorial.
Computers and Electronics in Agriculture, 15.
Rauscher, H.M., Schmoldt, D.L., Vacik, H., 2007. Information and knowledge
management in support of sustainable forestry: a review. In: Reynolds, K.M.,
Thomson, A.J., Khl, M., Shannon, M.A., Ray, D., Rennolls, K. (Eds.), Sustainable
Forestry. CABI, Wallingford, UK and Cambridge, MA, pp. 439460.
Remsoft Inc., 2012. Woodstock Modeling Platform.
Reynolds, K.M., 2005. Integrated decision support for sustainable forest
management in the United States: fact or ction? Decision support systems
for forest management decision support in multiple purpose forestry.
Computers and Electronics in Agriculture 49, 623.
Reynolds, K.M., 2006. EMDS 3.0: a modeling framework fpr coping with complexity
in environmental assessment and planning. Science in China: Series E
Technological Sciences, 6375.
Reynolds, K.M., Twery, M., Lexer, M.J., Vacik, H., Ray, D., Shao, G., 2008. Decision
support systems in forest management. In: Burnstein, F., Holsapple, C.W. (Eds.),
Handbook on Decision Support Systems. Springer, Berlin, pp. 499533.
Rinnooy Kan, A., Timmer, G., 1987. Stochastic global optimization methods. Part II:
Multi level methods. Mathematical Programming 39, 5778.
Rivaz, S., Yaghoobi, M.A., 2012. Minimax regret solution to multiobjective linear
programming problems with interval objective functions coefcients. Central
European Journal of Operations Research, 125.
Roelofs, M., Bisschop, J., 2011. AIMMS The Language Reference: AIMMS 3.12.
Roessiger, J., Griess, V.C., Knoke, T., 2011. May risk aversion lead to near-natural
forestry? A simulation study. Forestry 84, 527537.
Roise, J.P., 1990. Multicriteria nonlinear programming for optimal spatial allocation
of stands. Forest Science 36, 487501.
Salminen, H., Lehtonen, M., Hynynen, J., 2005. Reusing legacy FORTRAN in the
MOTTI growth and yield simulator. Computers and Electronics in Agriculture
49, 103113.
Seppelt, R., Voinov, A., 2002. Optimization methodology for land use patterns using
spatially explicit landscape models. Ecological Modelling 151, 125142.
Shao, G., Wang, H., Dai, L., Wu, G., Li, Y., Lang, R., Song, B., 2005. Integrating stand
and landscape decisions for multi-purposes of forest harvesting: decision
support in multi purpose forestry decision support in multi purpose forestry
selected papers from the symposium on Development and application of
decision support tools in multiple purpose forest management. Forest Ecology
and Management 207, 233243.
Speidel, G., 1984. Forstliche Betriebswirtschaftslehre, second ed. Parey, Hamburg.
Stambaugh, F., 1996. Risk and value at risk. European Management Journal 14, 612
621.
Stang, S., Knoke, T., 2009. Optimization of the prescribed cut planning to quantify
nancial yield losses like the climate change at the example of the municipal
forest enterprise Zittau. Waldkologie, Landschaftsforschung und Naturschutz,
8994.
Styblo Beder, T., 1995. VAR: seductive but dangerous. Financial Analysts Journal 51,
12.
Turner, M.G., Gardner, R.H., ONeill, R.V., 2001. Landscape Ecology in Theory and
Practice: Pattern and Process. Springer, New York.
Twery, M.J., Knopp, P.D., Thomasma, S.A., Rauscher, H.M., Nute, D.E., Potter, W.D.,
Maier, F., Wang, J., Dass, M., Uchiyama, H., Glende, A., Hoffman, R.E., 2005. NED-
2: a decision support system for integrated forest ecosystem management.
Computers and Electronics in Agriculture 49, 2443.
Varma, V.K., Ferguson, I., Wild, I., 2000. Decision support system for the sustainable
forest management. Forest Ecology and Management 128, 4955.
Verderame, P.M., Elia, J.A., Li, J., Floudas, C.A., 2010. Planning and scheduling under
uncertainty: a review across multiple sectors. Industrial & Engineering
Chemistry Research 49, 39934017.
WCED, 1987. Our Common Future. Oxford Paperbacks, University Press, Oxford.
Wei, R., Murray, A.T., 2012. Spatial uncertainty in harvest scheduling. Annals of
Operations Research, 115.
Weintraub, A., Romero, C., 2006. Operations research models and the management
of agricultural and forestry resources: a review and comparison. Interfaces 36,
446457.
Williams, B.K., 2012. Reducing uncertainty about objective functions in adaptive
management. Ecological Modelling 225, 6165.
Young, M.R., 1998. A minimax portfolio selection rule with linear programming
solution. Management Science 44, 643653.
Yousefpour, R., Jacobsen, J., Thorsen, B., Meilby, H., Hanewinkel, M., Oehler, K., 2012.
A review of decision-making approaches to handle uncertainty and risk in
adaptive forest management under climate change. Annals of Forest Science 69,
115.
Zell, J., 2008. Methoden fr die Ermittlung, Modellierung und Prognose der
Kohlenstoffspeicherung in Wldern auf Grundlage permanenter
Grorauminventuren. Ph.D. Thesis. Albert-Ludwigs-Universitt, Freiburg.
70 F. Hrtl et al. / Computers and Electronics in Agriculture 94 (2013) 5870
You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- What's A 'Gamma Flip' (And Why Should You Care) - Zero HedgeDocument5 pagesWhat's A 'Gamma Flip' (And Why Should You Care) - Zero HedgeMaulik Shah100% (1)
- An Introduction To Derivative Securities Financial Markets and Risk Management 1st Edition 2013 Jarrow ChatterjeaDocument881 pagesAn Introduction To Derivative Securities Financial Markets and Risk Management 1st Edition 2013 Jarrow Chatterjeahuhata100% (5)
- The Ultimate Guide To Trading OptionsDocument68 pagesThe Ultimate Guide To Trading Optionsjose HernandezNo ratings yet
- Keeping A Cool Head in A Hot Market Edward Dobson PDFDocument36 pagesKeeping A Cool Head in A Hot Market Edward Dobson PDFtak01100% (4)
- VC Term SheetDocument9 pagesVC Term Sheetapi-3764496100% (2)
- Islamic Banking User Manual-IJARADocument59 pagesIslamic Banking User Manual-IJARAPranay Kumar SahuNo ratings yet
- BDO Complex Financial Instruments 1Document74 pagesBDO Complex Financial Instruments 1Jessica GoldenNo ratings yet
- Buy/Sell Forex Secret: User GuideDocument16 pagesBuy/Sell Forex Secret: User GuideScalper100% (1)
- A265 - Quiz 1 Financial ManagementDocument9 pagesA265 - Quiz 1 Financial ManagementGraciela InacayNo ratings yet
- VK - Swot Analysis of Investment OptionsDocument3 pagesVK - Swot Analysis of Investment OptionsThajas100% (1)
- Trading With Advance Technical Tools & Options Strategy Delhi BrochureDocument3 pagesTrading With Advance Technical Tools & Options Strategy Delhi BrochureKrishnendu ChowdhuryNo ratings yet
- Uti-Leadership Equity Fund ODDocument68 pagesUti-Leadership Equity Fund ODSurbhi JoshiNo ratings yet
- By Implication: Peter J AckelDocument6 pagesBy Implication: Peter J Ackelmeko1986No ratings yet
- Ch01 Forwrd and Futures, OptionsDocument34 pagesCh01 Forwrd and Futures, Optionsabaig2011No ratings yet
- Virgin MobileDocument5 pagesVirgin MobileArnnava SharmaNo ratings yet
- Successful Traders Size Their PositionsDocument73 pagesSuccessful Traders Size Their PositionsLờ Trương100% (1)
- TGS - Mentorship 2.0Document11 pagesTGS - Mentorship 2.0Aakash KumarNo ratings yet
- ECO402 Solved Final Term Quizez MCQsDocument23 pagesECO402 Solved Final Term Quizez MCQsAmmar MalikNo ratings yet
- Commodities Backed Finance Project ReportDocument74 pagesCommodities Backed Finance Project Reportkamdica100% (2)
- Calendar SpreadDocument27 pagesCalendar SpreadSasikumar ThangaveluNo ratings yet
- MGT201 Midterm Solved 8 Papers Quisses by Ali KhannDocument74 pagesMGT201 Midterm Solved 8 Papers Quisses by Ali KhannmaryamNo ratings yet
- Banking RisksDocument11 pagesBanking Risksnishant vermaNo ratings yet
- Sugar BowlDocument11 pagesSugar BowlGlory100% (1)
- R Trader Trader's GuideDocument93 pagesR Trader Trader's Guidelearn2shareNo ratings yet
- Predicting Probability of Default of Indian Corporate Bonds Logistic and Z-Score ModelDocument20 pagesPredicting Probability of Default of Indian Corporate Bonds Logistic and Z-Score ModelraqthesolidNo ratings yet
- Anuj Gupta: Seeking Assignmnets in Finance & Marketing With An Organization of ReputeDocument2 pagesAnuj Gupta: Seeking Assignmnets in Finance & Marketing With An Organization of Reputepeter samuelNo ratings yet
- 2 Instruments and Techniques of Risk ManagementDocument6 pages2 Instruments and Techniques of Risk ManagementBappaditya RoyNo ratings yet
- 2016 FRM1 PracticeExamDocument77 pages2016 FRM1 PracticeExamPaul Antonio Rios MurrugarraNo ratings yet
- Chapter 2: Financing Company Operations Practice Questions Vienna LTD General JournalDocument8 pagesChapter 2: Financing Company Operations Practice Questions Vienna LTD General Journalsyed rahmanNo ratings yet
- "Cannot Be Determined" Isn't The Answer For Any of The QuestionsDocument7 pages"Cannot Be Determined" Isn't The Answer For Any of The QuestionsVirgileOrsotNo ratings yet