You might also like
- Control SystemsDocument8 pagesControl SystemsammukeeruNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- EC6405-Control Systems EngineeringDocument12 pagesEC6405-Control Systems EngineeringAnonymous XhmybK0% (1)
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsFrom EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNo ratings yet
- QUESTION BANK of Control Systems Engineering PDFDocument12 pagesQUESTION BANK of Control Systems Engineering PDFMouhanit LimbachiyaNo ratings yet
- Robust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationFrom EverandRobust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationNo ratings yet
- Ee2253 - Control Systems April-May 2010Document3 pagesEe2253 - Control Systems April-May 2010durgabalNo ratings yet
- Control SystemsDocument10 pagesControl SystemsSagaraptor RexNo ratings yet
- II B.Tech II Semester, Regular Examinations, April/May - 2012 Control SystemsDocument8 pagesII B.Tech II Semester, Regular Examinations, April/May - 2012 Control SystemsViswa ChaitanyaNo ratings yet
- Control SystemsDocument8 pagesControl SystemspadmajasivaNo ratings yet
- Cs April 2011Document8 pagesCs April 201129viswa12No ratings yet
- VI Sem ECEDocument12 pagesVI Sem ECESenthil Kumar KrishnanNo ratings yet
- EC 2255 Control SystemsDocument5 pagesEC 2255 Control SystemsselvijeganNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.VinayNo ratings yet
- LDCS QuestionsDocument10 pagesLDCS QuestionsRiya SinghNo ratings yet
- EC8391 CS IA2 QB IIIyearDocument4 pagesEC8391 CS IA2 QB IIIyearOhmsakthi Vel RNo ratings yet
- Control SystemsDocument8 pagesControl Systemsvasantha_btechNo ratings yet
- Classic Control Home Work SheetsDocument7 pagesClassic Control Home Work SheetsMohamad NabihNo ratings yet
- Control System Question BankDocument12 pagesControl System Question Banksagar R RaoNo ratings yet
- Question Paper Code: 11287Document5 pagesQuestion Paper Code: 11287Nishanth NiraiNo ratings yet
- Control System (PT)Document7 pagesControl System (PT)MATHANKUMAR.SNo ratings yet
- Kings: Question BankDocument12 pagesKings: Question BankdhayasathishNo ratings yet
- II B. Tech II Semester II B. Tech II Semester Regular Examinations August - 2014 Control Systems 2014Document8 pagesII B. Tech II Semester II B. Tech II Semester Regular Examinations August - 2014 Control Systems 2014Sandeep YandamuriNo ratings yet
- AssignmentDocument12 pagesAssignmentSamuel TanNo ratings yet
- Part BDocument2 pagesPart BNithyaa SathishNo ratings yet
- Question Paper Code: 55336: B.E./B.Tech. DEGREE EXAMINATIONS, NOV./DEC. 2011 Regulations 2008Document4 pagesQuestion Paper Code: 55336: B.E./B.Tech. DEGREE EXAMINATIONS, NOV./DEC. 2011 Regulations 2008Sarika VadivelanNo ratings yet
- Control Systems Unitwise Important Questions Unit 1 Part ADocument10 pagesControl Systems Unitwise Important Questions Unit 1 Part AChandra shekarNo ratings yet
- Control System 16 MarksDocument3 pagesControl System 16 MarksmuthurajNo ratings yet
- QB BcsDocument10 pagesQB BcsKrishna Reddy Y.VNo ratings yet
- Seventh Semester B.Tech. Degree Examination, June 2009 (2003 Scheme) Control Systems (T)Document3 pagesSeventh Semester B.Tech. Degree Examination, June 2009 (2003 Scheme) Control Systems (T)Saneesh KarayilNo ratings yet
- Question BankDocument7 pagesQuestion BankAvinash ChauhanNo ratings yet
- CL7101-Control System Design PDFDocument22 pagesCL7101-Control System Design PDFAyyar KandasamyNo ratings yet
- Cs April 2010Document8 pagesCs April 201029viswa12No ratings yet
- Cse PaperDocument5 pagesCse PaperSachin AgrawalNo ratings yet
- PTEE7301 April-2021Document2 pagesPTEE7301 April-2021imman46920No ratings yet
- Control SystemsDocument3 pagesControl SystemsselvajothiNo ratings yet
- TUTORIAL 6 - System ResponseDocument15 pagesTUTORIAL 6 - System ResponsetiraNo ratings yet
- EC602 Control Q Bank 2023Document9 pagesEC602 Control Q Bank 2023ROHAN CHOWDHURYNo ratings yet
- 9A02503 Control SystemsDocument4 pages9A02503 Control SystemssivabharathamurthyNo ratings yet
- CT Dec 2011Document3 pagesCT Dec 2011vpj100No ratings yet
- Control Systems Ece Nov 2020Document2 pagesControl Systems Ece Nov 2020Department of Electronics and Communication Engineering AKNUNo ratings yet
- 208 - EC8391, EC6405 Control System Engineering - Important QuestionsDocument7 pages208 - EC8391, EC6405 Control System Engineering - Important QuestionsSagar Babu NandigamaNo ratings yet
- Stability of Linear Feedback SystemDocument49 pagesStability of Linear Feedback SystemNANDHAKUMAR ANo ratings yet
- 4 ECE EC 2255 Control SystemDocument2 pages4 ECE EC 2255 Control SystemBIBIN CHIDAMBARANATHANNo ratings yet
- 7 UNIT Wise Imp QuesstionsDocument6 pages7 UNIT Wise Imp QuesstionsSravan GuptaNo ratings yet
- Contol SystemsDocument4 pagesContol SystemsselvijeganNo ratings yet
- Code - No: 45106Document2 pagesCode - No: 45106Raj SamuelNo ratings yet
- Control System Question BankDocument23 pagesControl System Question Bankdr mbaluNo ratings yet
- CONTROL SYSTEMS Set - 2 PDFDocument10 pagesCONTROL SYSTEMS Set - 2 PDFmaheshbabu527No ratings yet
- R.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question BankDocument6 pagesR.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question Bankaarthir88No ratings yet
- Control Systems-1 PDFDocument8 pagesControl Systems-1 PDFmaheshbabu527No ratings yet
- Control System Descriptive Type QuestionsDocument2 pagesControl System Descriptive Type QuestionsAlka Goyal100% (1)
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.HOD ECE KNCETNo ratings yet
- IC6501-Control Systems EngineeringDocument16 pagesIC6501-Control Systems EngineeringragupaNo ratings yet
- Lecture 4 - Simple Design Problems: K. J. ÅströmDocument7 pagesLecture 4 - Simple Design Problems: K. J. ÅströmEdutamNo ratings yet
- Svcet: 1. Define BIBO StabilityDocument3 pagesSvcet: 1. Define BIBO Stabilityrep domNo ratings yet
- Control Theory Quiz 1Document5 pagesControl Theory Quiz 1Sundas Khalid100% (1)
- 130403control System - Unit12Document4 pages130403control System - Unit12Nitin GoyalNo ratings yet
- Control Systems - Question BankDocument6 pagesControl Systems - Question Bankmadhu balanNo ratings yet
- 493 297 1Document8 pages493 297 1gkdharNo ratings yet
- Advances in Mechanical Engineering 2015 Jun 7 (6) 1687814015590298, Figure 1Document1 pageAdvances in Mechanical Engineering 2015 Jun 7 (6) 1687814015590298, Figure 1dhineshpNo ratings yet
- ClusteringDocument34 pagesClusteringdhineshpNo ratings yet
- Answers To Objective Control System 400 Questions From GATE & IESDocument2 pagesAnswers To Objective Control System 400 Questions From GATE & IESAbhishek Singh33% (3)
- Tips For InterviewDocument1 pageTips For InterviewdhineshpNo ratings yet
- Adc F04Document45 pagesAdc F04Suresh KumarNo ratings yet
- ThermocouplesDocument21 pagesThermocouplesdhineshpNo ratings yet
- Note 9 Stability: Lecture Notes of Control Systems I - ME 431/analysis and Synthesis of Linear Control System - ME862Document11 pagesNote 9 Stability: Lecture Notes of Control Systems I - ME 431/analysis and Synthesis of Linear Control System - ME862dhineshpNo ratings yet
- SMC 06 Alba BarbieriDocument6 pagesSMC 06 Alba BarbieridhineshpNo ratings yet
- Vibration Causes Havoc in Many ApplicationsDocument3 pagesVibration Causes Havoc in Many ApplicationsdhineshpNo ratings yet
- Output of The Thermister at 90 Degrees When RT 8.913 Is Signal Conditioned To 4.797VDocument1 pageOutput of The Thermister at 90 Degrees When RT 8.913 Is Signal Conditioned To 4.797VdhineshpNo ratings yet
- Directions To SolveDocument1 pageDirections To SolvedhineshpNo ratings yet
- Tips For InterviewDocument1 pageTips For InterviewKumar SushilNo ratings yet
- Digital Sound Level Meter: Precision Over 3 RangesDocument1 pageDigital Sound Level Meter: Precision Over 3 RangesdhineshpNo ratings yet
- Nyquist Stability CriterionDocument20 pagesNyquist Stability CriterionmoosuhaibNo ratings yet
- Using Thermistor Temperature Sensors With Campbell Scientific DataloggersDocument6 pagesUsing Thermistor Temperature Sensors With Campbell Scientific DataloggersdhineshpNo ratings yet
- Application For Faculty Position 2015-16Document2 pagesApplication For Faculty Position 2015-16dhineshpNo ratings yet
- 2-Lecture Notes Lesson4 2Document6 pages2-Lecture Notes Lesson4 2kstu1112No ratings yet
- Tutorial-1: Program StatementDocument2 pagesTutorial-1: Program StatementdhineshpNo ratings yet
- Page No.: 1. INTRODUCTION ... 1Document2 pagesPage No.: 1. INTRODUCTION ... 1dhineshpNo ratings yet
- Wipro 1 Answer KeyDocument3 pagesWipro 1 Answer KeydhineshpNo ratings yet
- Ex No:6 Modelling and Simulation of Buck and Boost Converter 10.11.2014Document6 pagesEx No:6 Modelling and Simulation of Buck and Boost Converter 10.11.2014dhineshpNo ratings yet
- DC MotorDocument8 pagesDC MotordhineshpNo ratings yet
- Design of 12-Bit Adc: End-Term Project, 6.775Document21 pagesDesign of 12-Bit Adc: End-Term Project, 6.775dhineshpNo ratings yet
- 2015 1 Romaszko inDocument12 pages2015 1 Romaszko inshreedharkoilekarNo ratings yet
- EE 4343/5329 - Control System Design Project: EE 4343/5329 Homepage EE 4343/5329 Course OutlineDocument14 pagesEE 4343/5329 - Control System Design Project: EE 4343/5329 Homepage EE 4343/5329 Course OutlineAkmaral NauryzgalievaNo ratings yet
- Control of Multiple-Input, Multiple-Output ProcessesDocument38 pagesControl of Multiple-Input, Multiple-Output ProcessesdhineshpNo ratings yet
- Chapter 14Document25 pagesChapter 14Sajjad AslamNo ratings yet
- Constant Power Control of DFIG Wind Turbines With Supercapacitor Energy StorageDocument9 pagesConstant Power Control of DFIG Wind Turbines With Supercapacitor Energy StoragedhineshpNo ratings yet
- Paper 16-A Hybrid Technique Based On Combining Fuzzy K-Means Clustering and Region Growing For Improving Gray Matter and White Matter SegmentationDocument7 pagesPaper 16-A Hybrid Technique Based On Combining Fuzzy K-Means Clustering and Region Growing For Improving Gray Matter and White Matter SegmentationdhineshpNo ratings yet
- HKUST 4Y Curriculum Diagram CIVLDocument4 pagesHKUST 4Y Curriculum Diagram CIVLfrevNo ratings yet
- OB and Attendance PolicyDocument2 pagesOB and Attendance PolicyAshna MeiNo ratings yet
- Abas Drug Study Nicu PDFDocument4 pagesAbas Drug Study Nicu PDFAlexander Miguel M. AbasNo ratings yet
- Scoring Rucric Lecture Eassess2.docx NewDocument6 pagesScoring Rucric Lecture Eassess2.docx NewMaica Ann Joy SimbulanNo ratings yet
- HDO OpeationsDocument28 pagesHDO OpeationsAtif NadeemNo ratings yet
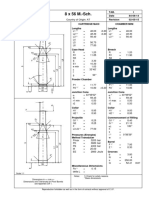
- 8 X 56 M.-SCH.: Country of Origin: ATDocument1 page8 X 56 M.-SCH.: Country of Origin: ATMohammed SirelkhatimNo ratings yet
- Febrile Neutropenia GuidelineDocument8 pagesFebrile Neutropenia GuidelineAslesa Wangpathi PagehgiriNo ratings yet
- Music Production EngineeringDocument1 pageMusic Production EngineeringSteffano RebolledoNo ratings yet
- 02 CT311 Site WorksDocument26 pages02 CT311 Site Worksshaweeeng 101No ratings yet
- Ty Baf TaxationDocument4 pagesTy Baf TaxationAkki GalaNo ratings yet
- Affidavit of Co OwnershipDocument2 pagesAffidavit of Co OwnershipEmer MartinNo ratings yet
- BarricadeDocument6 pagesBarricadeJithu PappachanNo ratings yet
- Financial Institutions Markets and ServicesDocument2 pagesFinancial Institutions Markets and ServicesPavneet Kaur Bhatia100% (1)
- Review of LiteratureDocument3 pagesReview of LiteratureAbhimanyu Narayan RaiNo ratings yet
- Final - Anarchy One-Sheet Sell SheetDocument2 pagesFinal - Anarchy One-Sheet Sell SheetMaddanie WijayaNo ratings yet
- Citibank CaseDocument6 pagesCitibank CaseLalatendu Das0% (1)
- OBOE GougerDocument2 pagesOBOE GougerCarlos GaldámezNo ratings yet
- Caroline Coady: EducationDocument3 pagesCaroline Coady: Educationapi-491896852No ratings yet
- Creating A Research Space (C.A.R.S.) ModelDocument5 pagesCreating A Research Space (C.A.R.S.) ModelNazwa MustikaNo ratings yet
- How To Change Front Suspension Strut On Citroen Xsara Coupe n0 Replacement GuideDocument25 pagesHow To Change Front Suspension Strut On Citroen Xsara Coupe n0 Replacement Guidematej89No ratings yet
- Optical Transport Network SwitchingDocument16 pagesOptical Transport Network SwitchingNdambuki DicksonNo ratings yet
- Dependent ClauseDocument28 pagesDependent ClauseAndi Febryan RamadhaniNo ratings yet
- Flipkart Labels 06 Jul 2022 09 52Document37 pagesFlipkart Labels 06 Jul 2022 09 52Dharmesh ManiyaNo ratings yet
- Properties of WaterDocument23 pagesProperties of WaterNiken Rumani100% (1)
- Our Story Needs No Filter by Nagarkar SudeepDocument153 pagesOur Story Needs No Filter by Nagarkar SudeepKavya SunderNo ratings yet
- Pyromet Examples Self StudyDocument2 pagesPyromet Examples Self StudyTessa BeeNo ratings yet
- Module 7 NSTP 1Document55 pagesModule 7 NSTP 1PanJan BalNo ratings yet
- Agenda - 2 - Presentation - MS - IUT - Thesis Proposal PPT Muhaiminul 171051001Document13 pagesAgenda - 2 - Presentation - MS - IUT - Thesis Proposal PPT Muhaiminul 171051001Tanvir AhmadNo ratings yet
- MegaMacho Drums BT READ MEDocument14 pagesMegaMacho Drums BT READ MEMirkoSashaGoggoNo ratings yet
- Chapter 4: Thermal ComfortDocument16 pagesChapter 4: Thermal ComfortWengelNo ratings yet
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziFrom Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNo ratings yet
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceFrom EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceRating: 5 out of 5 stars5/5 (5)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- Architects of Intelligence: The truth about AI from the people building itFrom EverandArchitects of Intelligence: The truth about AI from the people building itRating: 4.5 out of 5 stars4.5/5 (21)
- Working with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)From EverandWorking with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Rating: 5 out of 5 stars5/5 (5)
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsFrom EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNo ratings yet
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideFrom EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideRating: 5 out of 5 stars5/5 (1)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeFrom EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeRating: 4.5 out of 5 stars4.5/5 (69)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (15)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceFrom EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceRating: 4.5 out of 5 stars4.5/5 (38)
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)