You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Oregano: The Top 5 Health Benefits of OreganoDocument4 pagesOregano: The Top 5 Health Benefits of OreganoKrishnamurthiNageswari100% (1)
- Jsa Assembly The Chimney (Not Finish)Document3 pagesJsa Assembly The Chimney (Not Finish)putrasejahtraNo ratings yet
- All Cocci Are Gram Positive ExceptDocument7 pagesAll Cocci Are Gram Positive ExceptMariel Abatayo100% (1)
- BS en 61331-3-2014Document32 pagesBS en 61331-3-2014Ebi Rahmani100% (1)
- Osprey-Naval Aces of World War 1 Part IDocument100 pagesOsprey-Naval Aces of World War 1 Part ILeomar Acosta BallesterosNo ratings yet
- The History of Immunology and VaccinesDocument32 pagesThe History of Immunology and VaccinesClement del RosarioNo ratings yet
- MCQ Pead MockDocument8 pagesMCQ Pead MocknoblefxNo ratings yet
- Regulatory Compliance Pharmacy Manager in Tampa FL Resume John HawesDocument2 pagesRegulatory Compliance Pharmacy Manager in Tampa FL Resume John HawesJohnHawesNo ratings yet
- Funda ConceptsDocument201 pagesFunda ConceptsEncee Mian0% (1)
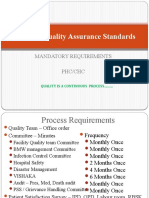
- National Quality Assurance Standards: Mandatory Requirements PHC/CHCDocument14 pagesNational Quality Assurance Standards: Mandatory Requirements PHC/CHCSathish KumaarNo ratings yet
- Management of Endometriosis-Associated PainDocument10 pagesManagement of Endometriosis-Associated PainRaul Garcia Salas CastilloNo ratings yet
- Systemic Lupus ErythematosusDocument9 pagesSystemic Lupus ErythematosusTheeya QuigaoNo ratings yet
- Pest ControlDocument8 pagesPest ControlFirst Last100% (1)
- A Mini Project Report On "Issues Challenge and Application of Emerging Technologies in The Pharmaceutical Industry"Document42 pagesA Mini Project Report On "Issues Challenge and Application of Emerging Technologies in The Pharmaceutical Industry"Raja Medical StoreNo ratings yet
- Blood Bank Harmening Chapter 10Document14 pagesBlood Bank Harmening Chapter 10ichummy19100% (3)
- IntsubDocument6 pagesIntsubLeomar Acosta BallesterosNo ratings yet
- Documento Deal An ADocument2 pagesDocumento Deal An ALeomar Acosta BallesterosNo ratings yet
- Fingerreader: A Wearable Device To Support Text Reading On The GoDocument6 pagesFingerreader: A Wearable Device To Support Text Reading On The GoLeomar Acosta BallesterosNo ratings yet
- Summary of Fractal Exponent CalculationDocument4 pagesSummary of Fractal Exponent CalculationLeomar Acosta BallesterosNo ratings yet
- Innovative Purification Method To Extract Magnetic 2011Document4 pagesInnovative Purification Method To Extract Magnetic 2011Leomar Acosta BallesterosNo ratings yet
- RelangmomDocument19 pagesRelangmomLeomar Acosta BallesterosNo ratings yet
- 1 s2.0 S0038092X12003416 MainDocument13 pages1 s2.0 S0038092X12003416 MainLeomar Acosta BallesterosNo ratings yet
- Malaria Treatment 2013Document75 pagesMalaria Treatment 2013Rheinny IndrieNo ratings yet
- Daftar Obat Apotek MutiaraDocument7 pagesDaftar Obat Apotek Mutiarafany hertinNo ratings yet
- PyodermaDocument19 pagesPyodermaNewton LongjamNo ratings yet
- What Causes A Urinary Tract InfectionDocument6 pagesWhat Causes A Urinary Tract InfectionStepyn SalvadorNo ratings yet
- Personal Accident Claim Form: Particulars of Insured (Company / Individual)Document2 pagesPersonal Accident Claim Form: Particulars of Insured (Company / Individual)Robbie Chan100% (1)
- New Drug Application - WikipediaDocument26 pagesNew Drug Application - Wikipediakabirsahu0019No ratings yet
- Endorsement Template SURGERYDocument2 pagesEndorsement Template SURGERYElizalde HusbandNo ratings yet
- B VCM 009501Document129 pagesB VCM 009501Evelyn Carolina Sepulveda CespedesNo ratings yet
- Antimalarials - Are They Effective and Safe in Rheumatic DiseasesDocument10 pagesAntimalarials - Are They Effective and Safe in Rheumatic DiseasesYahya RizkiNo ratings yet
- Locomotor SyllabusDocument5 pagesLocomotor SyllabusAyeshaKhalidNo ratings yet
- CELECOXIBDocument1 pageCELECOXIBRicky Ramos Jr.No ratings yet
- Day Scholar Application2007-08Document13 pagesDay Scholar Application2007-08Bild Andhra PradeshNo ratings yet
- EYE MCQ Uploaded by Hafiz BilalDocument2 pagesEYE MCQ Uploaded by Hafiz BilalMohammad Jamal NasirNo ratings yet
- Free UMDNJ Radiology Board ReviewDocument2 pagesFree UMDNJ Radiology Board ReviewradRounds Radiology Network100% (4)
- Template For Care Plan AssignmentDocument8 pagesTemplate For Care Plan AssignmentAnn OgoloNo ratings yet