Professional Documents
Culture Documents
Evaluación Acelerómetro PDF
Uploaded by
Javier Aguilar CruzOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Evaluación Acelerómetro PDF
Uploaded by
Javier Aguilar CruzCopyright:
Available Formats
Evaluacin de un Acelermetro
MEMS en un Pndulo
Jos Manuel Quero Reboul
Microsistemas
Dpto. de Ingeniera Electrnica
Universidad de Sevilla
Microsistemas
2
INDICE
1. INTRODUCCIN .................................................................................................... 2
2. Estudio del pndulo. ................................................................................................. 3
2.1. Balance de energa. ............................................................................................ 4
2.2. Aproximacin pequeas oscilaciones. ............................................................... 4
2.3. Observaciones al modelado ............................................................................... 5
3. Instrumentacin. ....................................................................................................... 6
1. INTRODUCCIN. ................................................................................................... 8
2. DESARROLLO PRCTICO ................................................................................... 8
3.1. Modo reposo o esttico. ..................................................................................... 8
3.2. Comportamiento dinmico............................................................................... 13
ANEXO I. Caractersticas de Fabricante del Acelermetro ADXL311. ................ Error!
Marcador no definido.
1. INTRODUCCIN
En esta prctica vamos a realizar un estudio sobre el comportamiento tanto dinmico
como esttico de un acelermetro diseado con tcnicas de microsistemas (MEMS) e
implementado sobre un circuito integrado.
Para dicho estudio vamos a utilizar el modelo ADLX311, cuyas hojas de caractersticas
de fabricante se adjuntan en el ANEXO I de esta memoria. Para un mayor
entendimiento, se recomienda una lectura detallada de sus caractersticas tcnicas antes
de empezar esta prctica.
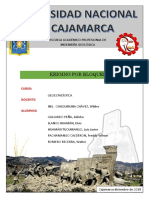
Figura 1. Maqueta de un pndulo empleada para la realizacin de la prctica
Medidor de
ngulos
Soporte
rgido
Circuito con
acelermetro
Sistema de
Adquisicin de
seales:
USB-6009
(National )Instruments
Microsistemas
3
Para el estudio de dicho acelermetro se ha montado un circuito unido a un eje de
oscilacin para producirnos oscilaciones peridicas amortiguadas, que nos sirvan para el
estudio dinmico del dispositivo MEMS. Dicho circuito no es ms que el especificado
para su correcto funcionamiento proporcionado por el fabricante, y particularizado para
nuestros intereses.
Una foto del diseo del pndulo es el que se muestra en la Figura 1.
Nuestro objetivo va a ser la evaluacin y comparacin del comportamiento de nuestro
acelermetro con las especificaciones dadas por el fabricante.
Esta maqueta se encuentra a disposicin de los alumnos en el Laboratorio de Mster del
Dpto. de Ingeniera Electrnica, ubicado en la primera planta del Laboratorio L2.
2. Estudio del pndulo.
Para un mejor entendimiento de los resultados a esperar, y para no perder tiempo en
meras ecuaciones de niveles muy inferiores a los que nos encontramos, se proporciona
un resumen de las ecuaciones y del comportamiento esperado para un pndulo simple
en situacin de movimiento armnico subamortiguado.
Un pndulo ideal est formado por una masa puntual m suspendida de un punto fijo por
medio de un hilo inextensible y sin peso como se muestra en la siguiente figura. Las
fuerzas que actan sobre la masa m son la tensin de la cuerda y el peso. La fuerza
tangencial del peso es una fuerza recuperadora dirigida hacia = 0, en direccin opuesta
al desplazamiento.
Figura 2. Fuerzas aplicadas a la masa del pndulo.
Por consiguiente, la ecuacin de movimiento se puede escribir como:
La ecuacin diferencial anterior se puede escribir tambin como:
[1]
Microsistemas
4
Esta ltima ecuacin corresponde a un movimiento que no es armnico simple debido a
que, la funcin ) ( sen no es lineal, y no es posible obtener una resolucin analtica.
2.1. Balance de energa.
A la misma ecuacin se puede llegar si se considera que la energa se conserva si se
desprecia las prdidas de rozamiento. En este caso, la energa potencial pasa a cintica
en el movimiento del pndulo. Tomemos referencia de energa potencial cero el punto
en el que la masa se encuentra en reposo y el pndulo en posicin vertical. En un punto
inicial del pndulo, la energa potencial ser
[2]
Siendo
0
una posicin inicial arbitraria.
En la posicin , la energa del pndulo es parte cintica y parte potencial
[3]
Sin prdidas, la energa se conserva, por lo que si igualamos [2] y [3] obtenemos una
expresin para la velocidad:
[4]
Si dejamos libre el pndulo partiendo de su posicin horizontal, la velocidad mxima se
obtiene en el punto inferior, siendo su valor:
[5]
Y como la velocidad tangencial y la velocidad angular se relacionan por , se
tiene que
[6]
2.2. Aproximacin pequeas oscilaciones.
Como se ha dicho anteriormente, la ecuacin [1] que describe el comportamiento del
pndulo no puede resolverse analticamente. Sin embargo, para ngulos pequeos se
tiene aproximadamente que ) ( sen . Por lo tanto la ecuacin anterior queda:
[7]
Esta ecuacin corresponde a un movimiento armnico simple de frecuencia angular
dada por:
[8]
Microsistemas
5
Como bien se puede observar, nuestro pndulo dista bastante de la idealidad, por lo que
deberemos aproximarnos un poco ms. Para ello, introducimos un factor de
amortiguamiento, dado por una fuerza proporcional a la velocidad y opuesta al sentido
del movimiento. No vamos a entrar en detalle en el planteamiento de ecuaciones, por lo
que damos directamente la solucin.
donde
y b la constante de proporcionalidad entre fuerza de rozamiento o amortiguamiento y
velocidad (F=-b*v). Y siendo la frecuencia del movimiento del sistema:
donde
0
es la frecuencia natural del pndulo en ausencia de amortiguamiento.
En resumen, cabramos esperar una seal de salida anloga a la siguiente figura:
Figura 3. Comportamiento del pndulo considerando amortiguamiento por rozamiento.
2.3. Observaciones al modelado
Para el caso del acelermetro y el diseo del pndulo que nos ocupa, cabra mencionar
algunas particularidades. Para el caso anterior, tenamos una masa m del pndulo. En
nuestro caso sera una masa M del pndulo y otra m del acelermetro. El por qu de
esta diferenciacin es debido a que nosotros estamos midiendo aceleraciones en un
sistema de referencia no inercial, es decir, el sistema est uniformemente acelerado y
por tanto estar afectado por fuerzas inerciales que nos estarn falseando nuestras
medidas y no obtendremos los valores esperados para el caso de una masa puntual
sometida a la fuerza de la gravedad.
El esquema al que nos referimos podra presentarse de la siguiente forma:
Microsistemas
6
Figura 4. Sistema inercial en el que la pequea masa del acelermetro m sufre aceleraciones debido
a estar unida mediante anclajes elsticos a la masa M.
Debido a este fenmeno no inercial, los valores de aceleracin, tal y como se podr
comprobar en el desarrollo de esta prctica, no corresponden con los valores tericos
esperados para un movimiento peridico de estas caractersticas.
3. Instrumentacin.
Para la elaboracin de esta prctica se va a hacer uso del software Labview, con opcin
de capturar ficheros para su mejor visualizacin en Matlab.
Para la obtencin de las seales en Labview se han usado las salidas de tensin del eje
X e Y del acelermetro, capturadas a travs de la tarjeta USB-6009 de National
Instruments, tal y como se observa en la Figura 1. Estas seales se han preprocesado
para obtener una mejor calidad de la seal de salida. Debido a la baja frecuencia del
movimiento en cuestin, estas seales se han filtrado mediante un filtro paso bajo
elptico con una frecuencia de corte de 10 Hz.
La carpeta donde se encuentran los archivos .VI correspondientes a la aplicacin, se
encuentra en el siguiente directorio:
\Escritorio\Practica_uSIST_pndulo
El fichero .VI a utilizar el pendulo.vi.
En este mismo directorio tambin se encuentra otra carpeta, \Data , donde podemos
encontrar el archivo grafica.m que nos va a servir para representar la grfica de las
seales obtenidas en Matlab.
El archivo pendulo.vi, tiene la opcin de grabar la seal deseada a un archivo, tal y
como se ha comentado anteriormente. Para ello, se debe pulsar el botn aadido a la
aplicacin con este fin. Dichos archivos tienen una capacidad de 10 MB, y se
encuentran en la carpeta \Data dentro del directorio de trabajo. En este directorio es
donde nos tenemos que situar en Matlab para que la funcin pndulo.m funcione
Microsistemas
7
correctamente. De todas formas, tambin se pueden realizar los mismos clculos en la
aplicacin Labview.
Para comenzar a realizar medidas, hay que pulsar el botn de ejecucin continua, tal y
como se muestra a en el diagrama frontal donde tambin se han incluido qu es cada
uno de los elementos que podemos encontrar en l.
Figura 5. Descripcin de la pantalla de presentacin de aceleraciones en Labview.
En el siguiente apartado comienza la realizacin de la prctica. Todas las cuestiones
deben ser contestadas y entregadas al profesor responsable de la asignatura.
Ejecucin
continua
Ejecucin
paso a paso
Grabar
Aceleracin
Tangencial/
Normal
Aceleracin
Normal
Aceleracin
Normal (en
voltios dada
por el sensor)
Offset/Ganancia
Aceleracin
Tangencial
Aceleracin
Tangencial
Aceleracin
Tangencial (en
voltios dada
por el sensor)
N muestras y
tasa de muestreo
STOP
Offset/Ganancia
Aceleracin Normal
Ac. Tangencial/Normal
Microsistemas
8
Evaluacin de un Acelermetro
MEMS en un Pndulo
Memoria
NOMBRE DE LOS ALUMNOS:
FECHA Y HORA:
1. INTRODUCCIN.
El objetivo de esta prctica es obtener la funcin de transferencia de un acelermetro
comercial de manera que se obtenga las aceleraciones en ejes X e Y en funcin de las
tensiones que ste genera. Se plantean un conjunto de fases y preguntas que se deben
contestar secuencialmente, aunque se recomienda avanzar en ellas antes de contestarlas
definitivamente hasta aclarar las dudas que surjan al alumno. Medir las seales con dos
cifras decimales.
2. DESARROLLO PRCTICO
3.1. Modo reposo o esttico.
En esta primera parte de la prctica, vamos a observar el comportamiento esttico del
sistema. Para ello se dispone en la maqueta de una escala en grados donde podemos
medir aproximadamente el valor del ngulo de inclinacin del acelermetro. Tomar
siempre una misma referencia, lo ms cercana al acelermetro, para medir la
inclinacin. En lo que sigue, denominaremos ejes X e Y a los que aparecen dibujados en
la Figura 4.
En modo esttico, nos vamos a fijar simplemente en los valores obtenidos en las
grficas de tensin, no en las de aceleracin, pues stas an no estn inicialmente
escaladas.
En estado de reposo, con el eje situado en 0 de la escala, iniciamos una medida de las
salidas del acelermetro.
Microsistemas
9
1) Cul es la tensin de salida en cada eje?
Eje X: V
Eje Y: V
(Nota: Selecciona no autoescalado de seal en la escala vertical de la ventana dnde se
representan cada una de las tensiones y modifica la escala manualmente para una mejor
observacin de los resultados. Tambin se recomienda pasar el pndulo lentamente
desde posicin vertical a horizontal y observar cmo cambian los valores de tensin V
x
y V
y
).
2) Sabras deducir a partir de las medidas anteriores cul es la tensin de
alimentacin del sistema sin tener que medirla?
...............................V
3) Cul ha sido t razonamiento?
4) A partir de estos resultados, Cul de los ejes (mirando a las grficas de Labview)
est midiendo un valor de gravedad distinto de cero en esta situacin?
5) Sabras decirme si es positiva o negativa y por qu es ste el eje acelerado?
Mueve el eje con la mano, mantenindolo fijo para cada posicin, de un lado a otro, de
ms a menos 90, y observa cmo varan las tensiones de ambos ejes. Mantn el eje lo
ms estable posible en dicha posicin para poder realizar una buena medida.
6) Cul es la tensin para gravedad o aceleracin cero en cada uno de los ejes?
Eje X: V
Eje Y: V
Microsistemas
10
7) En qu posiciones se obtienen?
Eje X:
Eje Y:
Nota: usar el semicrculo graduado colocado en el eje de giro del pndulo.
8) Cunto difieren respecto de los valores esperados en tensin segn las
especificaciones, sabiendo que la tensin de alimentacin real es de 5V?
Eje X: V
Eje Y: V
9) Sobre qu eje, segn la aplicacin, estamos midiendo la aceleracin vertical
(normal) y horizontal (tangencial)? Razona tu respuesta.
10) Para que posicin, midiendo en la escala graduada, tendrn ambos el mismo
valor de la aceleracin? (medir el ngulo de giro con el criterio de signos indicado
en el semicrculo graduado)
11) Tal y como se puede comprobar este sistema puede detectar cambios en la
aceleracin, realizado distintas medidas de los valores de la aceleracin en distintos
puntos, Cul sera su posicin ideal para medir variaciones de aceleracin sin
presencia de gravedad? Es decir, que ningn eje tuviera aceleracin en estado de
reposo.
? Circuito
?
Acelermetro
Microsistemas
11
12) Veremos que al moverse el pndulo, a la aceleracin de la gravedad medida por el
sensor se le sumarn las componentes de aceleracin tangencial o normal debidas al
propio movimiento. En nuestro caso estamos interesados en medir la aceleracin debida
al movimiento del pndulo, por lo que habr que quitarles la componente debida a la
gravedad, que acta como Offset, y calcular la ganancia que tiene el pndulo entre 0 y
90. Cul es el eje que mide aceleraciones normales, el X o Y?
13) Teniendo en cuenta la diferencia de tensin entre 0 y 45, y entre 45 y 90. Para
ello se debe completar las tensiones para las posiciones de 0, 45 y 90, y calcular los
valores de sensibilidad entre los dos intervalos y el valor medio, todo ello indicado en
la tabla siguiente:
Posicin 0 45 90 V(0)-V(45) V(45)-V(90)
V/
(0-45)
V/
(45-90)
V/
(medio)
V
x
V
y
Qu sensibilidad media has calculado para los dos ejes?
Eje X: ..................V/
Eje Y: ..................V/
14) Segn el fabricante, para un eje perpendicular a la gravedad, la sensibilidad a
cambios de inclinacin, difieren segn sean stos mayores o menores de 45, Cunto
difieren estas sensibilidades de las especificaciones?
A continuacin vamos a calcular los coeficientes de la funcin de transferencia lineal
que relaciona la aceleracin con las tensiones medidas en cada eje. Para ello vamos a
calcular la ganancia y la tensin offset de cada eje.
15) Rellena la siguiente tabla midiendo las tensiones de salida para los distintos ngulos
indicados. Poner tambin los valores de aceleracin calculados tericamente debido a la
proyeccin sobre los ejes X e Y del peso para cada posicin (para facilitar la
determinacin de estas componentes de aceleracin debida al peso, se recomienda
dibujar la aceleracin de la gravedad y los ejes X e Y en la misma tabla).
Microsistemas
12
ngulo
Tensin(V) a (m/s
2
)
Dibuja los ejes X e
Y y la gravedad
Eje Normal
Eje
Tangencial
Eje
Normal
Eje
Tangencial
-90
-45
0
45
90
16) Cul ser el offset que habr que quitar a ambas seales de tensin?
Eje normal:..........................V
Eje tangencial:.....................V
17) Ahora se puede calcular la ganancia de la funcin de transferencia a partir de la
tabla anterior:
ngulo
V =V()-V
offset
a()-a(0) K=a/V
Eje
Normal
Eje
Tangencial
Eje
Normal
Eje
Tangencial
Eje
Normal
Eje
Tangencial
-90
-45
0
45
90
Suponiendo que el pndulo es lineal, podemos tomar como la ganancia la media de
estos valores obtenidos e introducirlos en los controladores numricos asociados a la
ganancia de los que dispone la pantalla principal de la aplicacin en Labview.
Microsistemas
13
18) Cul ser la ganancia de ambos ejes?
Eje normal:.......................... (m/s
2
)/V
Eje tangencial:..................... (m/s
2
)/V
Introducir los valores calculados en los controladores numricos asociados al Offset de
los que dispone la pantalla principal de la aplicacin en Labview.
19) Escribir las funciones de transferencia obtenidas:
a
n
()= K
n
*(V
n
()-V
n_offset
)= ..*(V
n
()-..)m/s
2
a
t
()= K
t
*(V
t
()-V
t_offset
) = ..*(V
t
()-...) m/s
2
20) Deja el pndulo en la posicin de reposo y apunta las aceleraciones que aparecen en
las ventanas de Labview:
a
n
(0)= .m/s
2
a
t
(0)=. m/s
2
21) Coinciden con las esperadas? Explica tu respuesta.
3.2. Comportamiento dinmico.
A partir de ahora nos vamos a fijar en el comportamiento dinmico del sistema. Para
ello, debemos primero escalar la seal y convertirla en valores de aceleracin.
22) Antes de comenzar, hacemos oscilar el pndulo y nos fijamos en los valores que se
obtienen y de cmo dependen de la amplitud inicial que le demos a ste. Hay alguna
diferencia cualitativa en las seales obtenidas? Amplitud? Frecuencia?
Microsistemas
14
Para una mejor observacin de las seales de aceleracin, pasamos a escalar los valores
de tensin. Para ello debemos hacer un clculo del offset y de la ganancia de la seal y
utilizaremos algunos de los valores obtenidos anteriormente y algunos que habr que
medir ahora.
Para esta segunda parte de la prctica, se recomienda no sobrepasar los 40-45 de
amplitud inicial, pues el pndulo no se comporta bien mecnicamente para inclinaciones
mayores.
Haciendo oscilar ahora el pndulo podr observar los valores de aceleracin reales que
se obtienen. Se recomienda que pares el programa de labview para congelar las curvas
en la pantalla y poder medir dichas oscilaciones.
23) Cul es la frecuencia de oscilacin en cada eje?
Eje X:.....................................Hz
Eje Y:.....................................Hz
24) Es la misma? Por qu?
25) Observando la grfica donde aparecen ambas aceleraciones, dibuja y explica
con qu posicin del pndulo corresponden los picos y los valles de ambas curvas y
explica dichos puntos significativos.
Microsistemas
15
26) Observando los valores de la amplitud de las seales obtenidas, qu explicacin
daras a que haya valores mayores que g en estas aceleraciones?
27) Observando el signo de nuestra seal y comparando con la hoja del fabricante, En
qu sentido est orientado el dispositivo para cada eje?
28) Si aumentamos el nmero de muestras a obtener, de 1000 a 5000 por ejemplo,
podemos ver el decaimiento de la amplitud de la seal en el tiempo. Cul es la
constante de amortiguamiento del sistema si se aproxima una envolvente?
29) A continuacin, vamos a hacer oscilar el pndulo desde cualquier inclinacin
inicial. En cualquier momento hacemos una parada brusca de su movimiento pasando
por el ngulo 0, colocando un bolgrafo o cualquier material rgido de forma que
golpee a la barra de madera en el punto ms bajo de la trayectoria del pndulo, pero
teniendo cuidado de no tocar la tarjeta del sensor. Observa la seal que se obtiene en
ambos ejes y dibjalas.
Microsistemas
16
30) Podras explicar su forma?
31) Cules son los valores mximos de aceleracin que se obtienen?
32) Son positivos o negativos? Por qu?
You might also like
- Tecnicas de PronosticoDocument2 pagesTecnicas de Pronosticothais_núñezNo ratings yet
- Informe KrigingDocument22 pagesInforme KrigingLuis HuNo ratings yet
- Acta Visualización de VideoDocument46 pagesActa Visualización de VideoRafael Rodríguez100% (3)
- Lógica, Conjuntos, Funciones y RelacionesDocument99 pagesLógica, Conjuntos, Funciones y RelacionesAxpaal YatazNo ratings yet
- VentiladorFlight60Document2 pagesVentiladorFlight60Omar UbarnesNo ratings yet
- Infografía Trabajo Remoto Simple Verde ClaroDocument2 pagesInfografía Trabajo Remoto Simple Verde Claromonse glezNo ratings yet
- Matematica IDocument99 pagesMatematica IYoberIdinioQuispeRaymundez100% (1)
- 0cuando La Tecnologia Deja de Ser Una Ayuda DidacticaDocument14 pages0cuando La Tecnologia Deja de Ser Una Ayuda DidacticaFigaro AndresNo ratings yet
- Lista 5Document3 pagesLista 5Marcos Miguel Ibarra GautoNo ratings yet
- Material de Reforzamiento U7Document2 pagesMaterial de Reforzamiento U7Rocío milagros Paucar contrerasNo ratings yet
- Planificación Académica Primer Periodo 2015 Ingeniería CivilDocument5 pagesPlanificación Académica Primer Periodo 2015 Ingeniería CivilAdolfo MedinaNo ratings yet
- Piad-311 Contenido t004Document3 pagesPiad-311 Contenido t004Yhony MárquezNo ratings yet
- Apuntes Avalon Instalación y Solucion de Posibles ErroresDocument52 pagesApuntes Avalon Instalación y Solucion de Posibles ErroresAlvaro Alcocer SotilNo ratings yet
- Etapas de La FotogrametriaDocument2 pagesEtapas de La FotogrametriaJacinto Arano SNo ratings yet
- Lean Canvas para jabón ecológico de aceite reutilizadoDocument2 pagesLean Canvas para jabón ecológico de aceite reutilizadoSebastian Castro FandiñoNo ratings yet
- Oferta Academica UideDocument4 pagesOferta Academica UideJoselyn Michel Quezada CastilloNo ratings yet
- CV Henry Mendoza 07-13Document4 pagesCV Henry Mendoza 07-13douglasNo ratings yet
- Proy - 7 - Vestir Un Perfume - SCHER - ElisavaDocument3 pagesProy - 7 - Vestir Un Perfume - SCHER - ElisavaAnika BarrimoreNo ratings yet
- TEMA Nociones Básicas - RedesDocument10 pagesTEMA Nociones Básicas - RedesMariano Luque RayaNo ratings yet
- Definicion de Sistema Multiagente YoDocument3 pagesDefinicion de Sistema Multiagente YoEzio Daniel AuditoreNo ratings yet
- Memoria virtual: cómo funciona y sus beneficiosDocument2 pagesMemoria virtual: cómo funciona y sus beneficiosDianita MorenoNo ratings yet
- Paradigmas SistematicosDocument6 pagesParadigmas SistematicosFiorela RodriguezNo ratings yet
- Antenas Satelitales Tipos e InstalacionDocument11 pagesAntenas Satelitales Tipos e InstalacionJaime Alejandro Gajardo QuirozNo ratings yet
- Navegar Por Internet de Forma SeguraDocument10 pagesNavegar Por Internet de Forma SeguraJonathan Uriel Torres AriasNo ratings yet
- Qué Es EthernetDocument3 pagesQué Es EthernetheragonNo ratings yet
- Compra de Nintendo SwitchDocument2 pagesCompra de Nintendo SwitchGastélum OvidioNo ratings yet
- PFG Marketingdigitalt&lDocument83 pagesPFG Marketingdigitalt&lalvinNo ratings yet
- Taller Maquina Estado FinitaDocument2 pagesTaller Maquina Estado FinitaLISETH VASQUEZNo ratings yet
- Estrategias de marketing de Nike, Google, Cisco e IntelDocument4 pagesEstrategias de marketing de Nike, Google, Cisco e IntelJessica Daniela CalderónNo ratings yet
- INFORMATICA TrabajoDocument31 pagesINFORMATICA Trabajojhon pavaNo ratings yet