You might also like
- Sesión de Aprendizaje - Medimos El Tiempo en El RelojDocument6 pagesSesión de Aprendizaje - Medimos El Tiempo en El RelojEliana Honorio94% (32)
- LerviaDocument74 pagesLerviaEnrique ArribasNo ratings yet
- Digital Business PDFDocument56 pagesDigital Business PDFAngélica LozadaNo ratings yet
- Caso A FacturarDocument4 pagesCaso A FacturarWalter castillo anguloNo ratings yet
- FORMATO GTH-P18-F1 Inscripcion o Actualizacion en El EscalafonDocument2 pagesFORMATO GTH-P18-F1 Inscripcion o Actualizacion en El EscalafonLiyiPaterninaNo ratings yet
- Ing Servicios Introd Feb 2011Document80 pagesIng Servicios Introd Feb 2011Uriel KobayashiNo ratings yet
- Taller 1Document2 pagesTaller 1Carlos Ivan Bayona AlbaNo ratings yet
- BIP Julyette Paulin Gómez Vera 3Document8 pagesBIP Julyette Paulin Gómez Vera 3julianaNo ratings yet
- Por Mi Favorito AbandonadoDocument2,191 pagesPor Mi Favorito AbandonadoNikol Guzmán100% (2)
- Biomateriales Monografia EvolucionDocument9 pagesBiomateriales Monografia EvolucionIsa Cerdá RiveraNo ratings yet
- HOJA DE VISA TIVISAY Nueva PDFDocument3 pagesHOJA DE VISA TIVISAY Nueva PDFtivisayNo ratings yet
- Parcial - Escenario 4 - Primer Bloque-Teorico - Practico - Virtual - Gerencia Financiera - (Grupo b10)Document8 pagesParcial - Escenario 4 - Primer Bloque-Teorico - Practico - Virtual - Gerencia Financiera - (Grupo b10)Lady BonNo ratings yet
- Fecha Empresa: Salario: Número de Identificación: Nit: Nombre: Ciudad: Cargo: Tipo de Identificación: Periodo de PagoDocument1 pageFecha Empresa: Salario: Número de Identificación: Nit: Nombre: Ciudad: Cargo: Tipo de Identificación: Periodo de PagoJuan Daniel Renteria riascosNo ratings yet
- S5 - 4.plantilla de Comentario de HidrogramaDocument14 pagesS5 - 4.plantilla de Comentario de HidrogramaAzuNo ratings yet
- Perfil de Tesis - Aurelio Colan RodriguezDocument25 pagesPerfil de Tesis - Aurelio Colan RodriguezJesús José Arosquipa PachariNo ratings yet
- Guia de Resist MatDocument9 pagesGuia de Resist MatAlvaro Muruchi Rojas100% (1)
- Silabo Biofisica EstomatologicaDocument6 pagesSilabo Biofisica EstomatologicaJuan Augusto Fernández TarazonaNo ratings yet
- Horarios Afianza-Inicio 22-08-22Document14 pagesHorarios Afianza-Inicio 22-08-22Andre lizet Caldeon leytonNo ratings yet
- Tema 13 Conceptos Basicos Do CteDocument4 pagesTema 13 Conceptos Basicos Do CteRocio Hermida MiserNo ratings yet
- MineroReyes JenniferGuiviny M2S3AI5Document2 pagesMineroReyes JenniferGuiviny M2S3AI5jennifer minero reyesNo ratings yet
- Solucion de Caso de Estudio #2Document4 pagesSolucion de Caso de Estudio #2Alejandra MVNo ratings yet
- Foro Regresion Minimos Cuadrados IPAC 2020Document3 pagesForo Regresion Minimos Cuadrados IPAC 2020Daniel Mercado PadillaNo ratings yet
- Conceptos Generales de La InformaticaDocument7 pagesConceptos Generales de La InformaticaSergio Sanchez RojasNo ratings yet
- El Problema Del Aseguramiento Del EstatusDocument2 pagesEl Problema Del Aseguramiento Del EstatusGustavo Rodríguez GarcíaNo ratings yet
- Práctica de PAreto, Teoría de Decisiones Yorleny CuetoDocument27 pagesPráctica de PAreto, Teoría de Decisiones Yorleny CuetoYorleny CuetoNo ratings yet
- 2018-1 Guia1. Manejo de Instrumentos de MediciónDocument3 pages2018-1 Guia1. Manejo de Instrumentos de MediciónMiguel Angel Muñoz NopeNo ratings yet
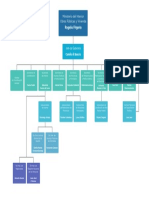
- Organigrama Ministerio Del Interior 1 - ARGENTINADocument1 pageOrganigrama Ministerio Del Interior 1 - ARGENTINAdaniel muñozNo ratings yet
- Resumen de Las PelículasDocument3 pagesResumen de Las PelículasAngiellyNo ratings yet
- Script Conferencia Perfectos DragonesDocument11 pagesScript Conferencia Perfectos DragonesdibuyoNo ratings yet
- Examen 2 Sistemas de Ecuaciones de Primer GradoDocument4 pagesExamen 2 Sistemas de Ecuaciones de Primer GradoErnesto Laguna gonzalezNo ratings yet