You might also like
- Deflections Using Energy Methods - GDLCDocument56 pagesDeflections Using Energy Methods - GDLCSk AliNo ratings yet
- Virtual Work and Variational Principles PDFDocument9 pagesVirtual Work and Variational Principles PDFAbdul Hafeez SadonNo ratings yet
- From Structural Analysis To Finite Element MethodDocument25 pagesFrom Structural Analysis To Finite Element MethodB S Praveen BspNo ratings yet
- Explicit Dynamic Analysis in AbaqusDocument19 pagesExplicit Dynamic Analysis in AbaqusDavid RivadeneiraNo ratings yet
- 5.deflections Using Energy Methods PDFDocument47 pages5.deflections Using Energy Methods PDFking burgosNo ratings yet
- Fea QBDocument11 pagesFea QBPradeepNo ratings yet
- Analytical Solutions Can Not Be ObtainedDocument120 pagesAnalytical Solutions Can Not Be ObtainedMuket AgmasNo ratings yet
- Non Linear Solver Arc Length ControlDocument26 pagesNon Linear Solver Arc Length Controlashok.whyo100% (1)
- Finite Element AnalysisDocument113 pagesFinite Element AnalysisTochi Krishna Abhishek57% (7)
- Formulas For Structural Dynamics Tables, Graphs and SolutionsDocument492 pagesFormulas For Structural Dynamics Tables, Graphs and SolutionsErshad Ahmed100% (1)
- Lecture 4 - Deflection of Beams - Geometric MethodsDocument60 pagesLecture 4 - Deflection of Beams - Geometric MethodsMary Dominique OnateNo ratings yet
- 1-Basic ConceptsDocument47 pages1-Basic Conceptsjaved hussainNo ratings yet
- Engineering Mechanics Notes2222Document100 pagesEngineering Mechanics Notes2222rajasekharjvNo ratings yet
- Virtual Work and Variational Principles ExplainedDocument9 pagesVirtual Work and Variational Principles ExplainedBill Erick CastilloNo ratings yet
- Discretization ErrorDocument11 pagesDiscretization Errorசுஜித் குமார்No ratings yet
- Structural Analysis 2Document52 pagesStructural Analysis 2Srinivas EnamandramNo ratings yet
- Derivation of Stiffness Matrix For A BeamDocument21 pagesDerivation of Stiffness Matrix For A BeamAnonymous 1BdR0EQgbu100% (1)
- Direct Stiffness Method ExplainedDocument6 pagesDirect Stiffness Method ExplainedMuhammad Shahid HussainNo ratings yet
- C05 - Stationary Potential EnergyDocument73 pagesC05 - Stationary Potential Energyyttan1116No ratings yet
- Newton Raphson MethodDocument11 pagesNewton Raphson MethodGagan SodhiNo ratings yet
- Chapter 4 Multiple Degree of Freedom SystemsDocument89 pagesChapter 4 Multiple Degree of Freedom SystemsTom LaNo ratings yet
- Finite Element Analysis Notes (Computer Aided Engineering)Document48 pagesFinite Element Analysis Notes (Computer Aided Engineering)utub3abr0100% (5)
- Stability of Discrete Non-conservative SystemsFrom EverandStability of Discrete Non-conservative SystemsRating: 1 out of 5 stars1/5 (1)
- Strain Energy Part 1Document20 pagesStrain Energy Part 1aalijanaabNo ratings yet
- Work and Energy PrinciplesDocument12 pagesWork and Energy PrinciplesHernan Kennedy Ricaldi PorrasNo ratings yet
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsFrom EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo ratings yet
- On The Evaluation of Critical Lateral Torsional Buckling Loads of Monosymmetric Beam ColumnsDocument8 pagesOn The Evaluation of Critical Lateral Torsional Buckling Loads of Monosymmetric Beam ColumnsPauloAndresSepulvedaNo ratings yet
- Solution To Engineering Problems Using Finite Element MethodDocument39 pagesSolution To Engineering Problems Using Finite Element Methodahmet mehmetNo ratings yet
- Viscoelastic hereditary integralsDocument12 pagesViscoelastic hereditary integralsletter_ashish4444No ratings yet
- Determining accidental forklift impact forces on steel racksDocument16 pagesDetermining accidental forklift impact forces on steel racksdeepak_dce_meNo ratings yet
- Bolotin VV-The Dynamic Stability of Elastic SystemsDocument455 pagesBolotin VV-The Dynamic Stability of Elastic Systemshspanda100% (2)
- Finite Element Analysis of Shell StructuresDocument59 pagesFinite Element Analysis of Shell Structuresshayan_saket3899No ratings yet
- Rayleigh Ritz Method ExplainedDocument19 pagesRayleigh Ritz Method ExplainedMohit VatsNo ratings yet
- Mechanic of MaterialsDocument32 pagesMechanic of MaterialsHussain RizviNo ratings yet
- Buckling of ColumnsDocument20 pagesBuckling of ColumnsOleNo ratings yet
- Hibbeler Ch02 ExamplesDocument49 pagesHibbeler Ch02 ExamplesMúslimÄhIslamNo ratings yet
- Slope Deflection MethodDocument54 pagesSlope Deflection Methodsuhademir100% (2)
- Chapter 01Document38 pagesChapter 01Bu sultanNo ratings yet
- Static Analysis of Timoshenko Beams Using Isogeometric ApproachDocument9 pagesStatic Analysis of Timoshenko Beams Using Isogeometric ApproachcapicaNo ratings yet
- Plastic AnalysisDocument51 pagesPlastic AnalysisHafeel Ahamed Ashraf AliNo ratings yet
- 4.4.1 Equivalent Loading On Beam Member: Q N W XDXDocument9 pages4.4.1 Equivalent Loading On Beam Member: Q N W XDXsrinadh1602No ratings yet
- Frame Analysis Using Matrix Strutural AnalysisDocument12 pagesFrame Analysis Using Matrix Strutural AnalysisCarl Chester RagudoNo ratings yet
- Minimum Potential EnergyDocument9 pagesMinimum Potential EnergyBright MuzaNo ratings yet
- CH 2 Stiffness Method 09Document22 pagesCH 2 Stiffness Method 09Syahrianto Saputra100% (1)
- The Uniform Force MothodDocument4 pagesThe Uniform Force MothodJoaquin Ignacio Concha NúñezNo ratings yet
- Elastic Second Order Computer Analysis of Beam Columns and FramesDocument140 pagesElastic Second Order Computer Analysis of Beam Columns and Framesapirakq100% (4)
- CE8395 Strength of Materials For Mechanical Engineers Questions and AnswersDocument49 pagesCE8395 Strength of Materials For Mechanical Engineers Questions and Answersvijayan RNo ratings yet
- Statics NoteDocument26 pagesStatics NoteMei GuanNo ratings yet
- Som NotesDocument54 pagesSom Notesmeetvinayak2007No ratings yet
- Nonlinear Ordinary Differential Equations in Transport ProcessesFrom EverandNonlinear Ordinary Differential Equations in Transport ProcessesNo ratings yet
- Matrix Methods of Structural Analysis: Pergamon International Library of Science, Technology, Engineering and Social StudiesFrom EverandMatrix Methods of Structural Analysis: Pergamon International Library of Science, Technology, Engineering and Social StudiesRating: 4.5 out of 5 stars4.5/5 (3)
- Cartesian Tensors in Engineering Science: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionFrom EverandCartesian Tensors in Engineering Science: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionNo ratings yet
- Computational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsFrom EverandComputational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsAhmed K. NoorNo ratings yet
- An Introduction to the Theory of ElasticityFrom EverandAn Introduction to the Theory of ElasticityRating: 4.5 out of 5 stars4.5/5 (2)
- Computational Wind Engineering 1: Proceedings of the 1st International Symposium on Computational Wind Engineering (CWE 92) Tokyo, Japan, August 21-23, 1992From EverandComputational Wind Engineering 1: Proceedings of the 1st International Symposium on Computational Wind Engineering (CWE 92) Tokyo, Japan, August 21-23, 1992S. MurakamiNo ratings yet
- V62 P6.2-Text 2018-10Document33 pagesV62 P6.2-Text 2018-10Bright MuzaNo ratings yet
- Construction Law by John Uff - 12 EdDocument684 pagesConstruction Law by John Uff - 12 EdBright MuzaNo ratings yet
- Progress ReportDocument1 pageProgress ReportBright MuzaNo ratings yet
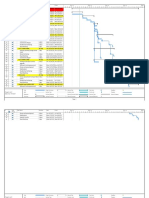
- ERRP2 LOT E MasvingoDocument2 pagesERRP2 LOT E MasvingoBright MuzaNo ratings yet
- Zvishavane Town Council Site VisitDocument4 pagesZvishavane Town Council Site VisitBright MuzaNo ratings yet
- BUQS 7022 - Lecture 2 - Construction Procurement Strategy - 2023 PDFDocument32 pagesBUQS 7022 - Lecture 2 - Construction Procurement Strategy - 2023 PDFBright MuzaNo ratings yet
- Machongwe-Risitu Priming Method StatementDocument9 pagesMachongwe-Risitu Priming Method StatementBright MuzaNo ratings yet
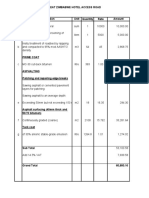
- Great Zimbabwe Hotel Access RoadDocument1 pageGreat Zimbabwe Hotel Access RoadBright MuzaNo ratings yet
- 231 Regent ST #302, Fredericton, NB E3B 3W8Document5 pages231 Regent ST #302, Fredericton, NB E3B 3W8Bright MuzaNo ratings yet
- Masvingo Road Widening Project Site Meeting MinutesDocument3 pagesMasvingo Road Widening Project Site Meeting MinutesBright MuzaNo ratings yet
- Buse - Proposed National Sports Academy Phase OneDocument3 pagesBuse - Proposed National Sports Academy Phase OneBright MuzaNo ratings yet
- ch12 PDFDocument30 pagesch12 PDFRadhika VeeralaNo ratings yet
- Late Submission of Lab Results - Soil TechDocument1 pageLate Submission of Lab Results - Soil TechBright MuzaNo ratings yet
- Bus Stop Shed DrawingDocument1 pageBus Stop Shed DrawingBright MuzaNo ratings yet
- Aicd Background Paper 14 Roads Sect Summary enDocument10 pagesAicd Background Paper 14 Roads Sect Summary enBright MuzaNo ratings yet
- 1 Ha Bean - 11 March 2014 - WebDocument1 page1 Ha Bean - 11 March 2014 - WebBright MuzaNo ratings yet
- UNB Fredericton Tuition & Fees 2017-2018 Course Based Part Time StudentDocument1 pageUNB Fredericton Tuition & Fees 2017-2018 Course Based Part Time StudentBright MuzaNo ratings yet
- Reinforced Concrete Wall Form Design ProgramDocument153 pagesReinforced Concrete Wall Form Design ProgramBright MuzaNo ratings yet
- Article ReviewDocument2 pagesArticle ReviewBright MuzaNo ratings yet
- Project Manager Resignation LetterDocument1 pageProject Manager Resignation LetterBright MuzaNo ratings yet
- Pump B 2nd Lift 1 and 1st Lift 2Document2 pagesPump B 2nd Lift 1 and 1st Lift 2Bright MuzaNo ratings yet
- All Questions: Open Book ExaminationDocument3 pagesAll Questions: Open Book ExaminationBright Muza100% (1)
- Guidelines For Participant Consent and Debriefing FormsDocument4 pagesGuidelines For Participant Consent and Debriefing FormsBright MuzaNo ratings yet
- Tomato Production Guideline 2014Document11 pagesTomato Production Guideline 2014Bright MuzaNo ratings yet
- Concrete Casting - Pump Station ADocument13 pagesConcrete Casting - Pump Station ABright MuzaNo ratings yet
- Debriefing FormDocument1 pageDebriefing FormBright MuzaNo ratings yet
- Excavation QuantitiesDocument1 pageExcavation QuantitiesBright MuzaNo ratings yet
- TCW5202200605 Foundation Engineering DesignDocument2 pagesTCW5202200605 Foundation Engineering DesignBright MuzaNo ratings yet
- Miracles The Great DebateDocument3 pagesMiracles The Great DebateBright MuzaNo ratings yet
- TCW5202200505 Foundation Engineering DesignDocument5 pagesTCW5202200505 Foundation Engineering DesignBright MuzaNo ratings yet
- Interviewing The Art of Science. Adrea Fontana & James H. Frey PDFDocument16 pagesInterviewing The Art of Science. Adrea Fontana & James H. Frey PDFJanek TarnasNo ratings yet
- Math, Models and ModalityDocument317 pagesMath, Models and Modalityinajeh100% (1)
- Example: Let X Represent The Sum of Two Dice.: A Discrete Random Variable X Has A Countable Number of Possible ValuesDocument7 pagesExample: Let X Represent The Sum of Two Dice.: A Discrete Random Variable X Has A Countable Number of Possible ValuesJAMESEDRIAN RUBIONo ratings yet
- Atmakaraka PART 4Document7 pagesAtmakaraka PART 4Tushar Kumar BhowmikNo ratings yet
- Eeg GelDocument2 pagesEeg GelVijay RajNo ratings yet
- Writing Undergraduate Lab Reports: 20% DiscountDocument1 pageWriting Undergraduate Lab Reports: 20% DiscountSage of Six BowlsNo ratings yet
- CSP11505110 Assignment 2 162Document13 pagesCSP11505110 Assignment 2 162Cesar UcvNo ratings yet
- Translation of Japanese Onomatopoeia Into Swedish (With Focus On Lexicalization)Document20 pagesTranslation of Japanese Onomatopoeia Into Swedish (With Focus On Lexicalization)Aldandy OckadeyaNo ratings yet
- GENG5505 Lecture 01Document30 pagesGENG5505 Lecture 01xx_aleksa_hrvatska_xxNo ratings yet
- Mini Project Report FormatDocument14 pagesMini Project Report FormatAkshata BolliNo ratings yet
- Alarm Rationalization DeltaVDocument23 pagesAlarm Rationalization DeltaVchem_ta100% (1)
- OP320Document28 pagesOP320panchofrancoNo ratings yet
- Joyce Hwee Ling Koh, Ching Sing Chai, Benjamin Wong, Huang-Yao Hong-Design Thinking For Education - Conceptions and Applications in Teaching and Learning-Springer (2015)Document141 pagesJoyce Hwee Ling Koh, Ching Sing Chai, Benjamin Wong, Huang-Yao Hong-Design Thinking For Education - Conceptions and Applications in Teaching and Learning-Springer (2015)halbesNo ratings yet
- Trắc nghiệm thi chuyên KeysDocument10 pagesTrắc nghiệm thi chuyên KeysPhúc VũNo ratings yet
- Tyler - REV - The Said and The UnsaidDocument6 pagesTyler - REV - The Said and The UnsaidThorn KrayNo ratings yet
- Human Resource Development - An OverviewDocument31 pagesHuman Resource Development - An OverviewGangadhar50% (2)
- Ijeefus - Influence of Home Environment and Type of School On EmotionalDocument6 pagesIjeefus - Influence of Home Environment and Type of School On EmotionalTJPRC PublicationsNo ratings yet
- Complete Perl TutorialDocument319 pagesComplete Perl TutorialCryptex MmxNo ratings yet
- 1 PDFDocument20 pages1 PDFEduardo CharpenelNo ratings yet
- Discrete Math Chapter 7 & 8 TestDocument7 pagesDiscrete Math Chapter 7 & 8 TestgeniusamitNo ratings yet
- The Diatom GlasshouseDocument2 pagesThe Diatom GlasshouseCristóbal MenaNo ratings yet
- Waves and Vibrations: Physics: Mr. MaloneyDocument43 pagesWaves and Vibrations: Physics: Mr. MaloneySomnath Biswal100% (1)
- Locality/Ethnic Group Region Elevation (M Asl) N Informants N PlantsDocument6 pagesLocality/Ethnic Group Region Elevation (M Asl) N Informants N PlantsyodhaarspinoNo ratings yet
- Construction StandardsDocument379 pagesConstruction StandardsAris Fauzi100% (3)
- Defence Accommodation StrategyDocument40 pagesDefence Accommodation StrategyAndrewNo ratings yet
- Differential Equations ProblemsDocument5 pagesDifferential Equations ProblemsLeAnne CabanteNo ratings yet
- ACS Unit 1Document9 pagesACS Unit 1Partha Sarathy100% (1)
- OAG Data Suite E-BrochureDocument23 pagesOAG Data Suite E-BrochurerazanymNo ratings yet
- Bihar State Universities (Amendment and Validation) Act, 2012Document22 pagesBihar State Universities (Amendment and Validation) Act, 2012Latest Laws Team100% (1)
- Up-F-020 Solicitud de Admisión de Practicantes Ver-08Document108 pagesUp-F-020 Solicitud de Admisión de Practicantes Ver-08MARCOS RODOLFO MALDONADO ZEVALLOSNo ratings yet