You might also like
- Sistema ScadaDocument6 pagesSistema ScadaAndy Sidney Quispe ValenciaNo ratings yet
- SentenciaDocument78 pagesSentenciaBioBioChile100% (1)
- Manual Lucas Null.Document26 pagesManual Lucas Null.Steven SpenceNo ratings yet
- Planificacion Completa de Edad MediaDocument10 pagesPlanificacion Completa de Edad MediaAlejandro Chavez Osorio100% (1)
- Guia Prototipos PDFDocument53 pagesGuia Prototipos PDFNelson Muñoz CerdaNo ratings yet
- Electrónica Analógica IDocument5 pagesElectrónica Analógica IProfesor ElectrónicaNo ratings yet
- Tutorial para Dibujar Engranajes Con Solid EdgeDocument17 pagesTutorial para Dibujar Engranajes Con Solid Edgesrqp1980No ratings yet
- Txapuzas Blogspot Com ArDocument15 pagesTxapuzas Blogspot Com ArluisNo ratings yet
- FotodiodoDocument8 pagesFotodiodoJohan GRNo ratings yet
- Interfaz Visual Basic 6 y Arduino PDFDocument90 pagesInterfaz Visual Basic 6 y Arduino PDFAbel RodriguezNo ratings yet
- Manual de Mantenimientos A Los Sistemas MecanicosDocument138 pagesManual de Mantenimientos A Los Sistemas MecanicosArturo Pineda100% (1)
- Planeacion Etica y Valores IIDocument11 pagesPlaneacion Etica y Valores IIKimberly XironetNo ratings yet
- Apuntes Fresadora AlumnosDocument62 pagesApuntes Fresadora AlumnosEdu CcNo ratings yet
- Motores de CADocument16 pagesMotores de CASantiago CárdenasNo ratings yet
- Estructuras de Datos en PythonDocument42 pagesEstructuras de Datos en PythonMarc SeguraNo ratings yet
- Collier, David - El Método Comparativo. Dos Décadas de Cambio PDFDocument16 pagesCollier, David - El Método Comparativo. Dos Décadas de Cambio PDFElías FernándezNo ratings yet
- Montaje y Mantenimiento de M Quinas El Ctricas Rotativas Montaje y Mantenimiento de Instalaciones El Ctricas de Baja Tensi N UF0897 PDFDocument93 pagesMontaje y Mantenimiento de M Quinas El Ctricas Rotativas Montaje y Mantenimiento de Instalaciones El Ctricas de Baja Tensi N UF0897 PDFRodolfo Augusto Guerrero ReyesNo ratings yet
- Rosca MetricaDocument4 pagesRosca MetricalucasNo ratings yet
- Maquinas Electricas. Presentacion 4. TransformadoresDocument39 pagesMaquinas Electricas. Presentacion 4. TransformadoresLucia Dario LuluNo ratings yet
- CNC FuncionesDocument5 pagesCNC FuncionesRoberto HernandezNo ratings yet
- Motores de Paso PDFDocument19 pagesMotores de Paso PDFChristian Camacho100% (1)
- LAB 8 - Circuitos de Conversión ADC y DAC PDFDocument2 pagesLAB 8 - Circuitos de Conversión ADC y DAC PDFElmer525No ratings yet
- Guia ElectrotecniaDocument12 pagesGuia ElectrotecniaIvan Miguel Londoño SilvaNo ratings yet
- 10 - Téc. en ElectromecánicaDocument205 pages10 - Téc. en ElectromecánicaDaiana Pérez GiménezNo ratings yet
- Investigación de Robótica IndustrialDocument190 pagesInvestigación de Robótica IndustrialSonia HernandezNo ratings yet
- Sena Ejemplo DiseñoDocument116 pagesSena Ejemplo DiseñoJORGE PARRANo ratings yet
- Manual de PrototiposDocument10 pagesManual de PrototiposDavid CelyNo ratings yet
- Manual Solid Edge Volumen 1Document542 pagesManual Solid Edge Volumen 1antoniodiazdiazNo ratings yet
- Proyecto TransportadoraDocument67 pagesProyecto TransportadoraJayro HdezaNo ratings yet
- Diseñar Construir y Simular Una CatapultaDocument6 pagesDiseñar Construir y Simular Una Catapultachivo2145No ratings yet
- Practica SimulacionDocument4 pagesPractica Simulacioncabobunbury10No ratings yet
- D4.1 Componentes de Máquinas y Sistemas Electromecánicos. V2Document156 pagesD4.1 Componentes de Máquinas y Sistemas Electromecánicos. V2isaac castañedaNo ratings yet
- Planeacion DidacticaDocument7 pagesPlaneacion DidacticaCarlos RuizNo ratings yet
- 2y3 Modulo 5to Mecanica IndustrialDocument44 pages2y3 Modulo 5to Mecanica IndustrialEliana Cuba PajeNo ratings yet
- Código de Colores de LedsDocument5 pagesCódigo de Colores de Ledsinformatica tecnicaNo ratings yet
- Catalogo General Castellano A4 2013Document250 pagesCatalogo General Castellano A4 2013edwinprun12No ratings yet
- Qué Es Una ResistenciaDocument6 pagesQué Es Una ResistenciaAlexander Quintero ArguellesNo ratings yet
- Proyecto Integrador 3 Semestre PDFDocument3 pagesProyecto Integrador 3 Semestre PDFPaola Andrea Bermeo QuinayasNo ratings yet
- Paper Robotica Robots BioinspiradosDocument9 pagesPaper Robotica Robots BioinspiradosJavier IzaNo ratings yet
- Prototipo Automático para Llenado, Mezclado y Sellado de Envases de PinturaDocument17 pagesPrototipo Automático para Llenado, Mezclado y Sellado de Envases de Pinturajvc252915No ratings yet
- Terminologia de La Instrumentacion 1Document5 pagesTerminologia de La Instrumentacion 1YANETNo ratings yet
- Borrador Silabo Electricidad BasicaDocument5 pagesBorrador Silabo Electricidad BasicaYan IrisNo ratings yet
- Comunicación Serial - Conceptos Generales - National Instruments PDFDocument4 pagesComunicación Serial - Conceptos Generales - National Instruments PDFStefy AlanizNo ratings yet
- Medidor de Energia ElectricaDocument35 pagesMedidor de Energia ElectricaAndrés B VillaNo ratings yet
- Carpeta de Electricidad Primer Año Basico 2017Document29 pagesCarpeta de Electricidad Primer Año Basico 2017Javier CanteroNo ratings yet
- Guia de ProtoboardDocument7 pagesGuia de ProtoboardALEX FABIAN GARCIA TORONo ratings yet
- Evaluación de Sensores para Su Conexión A Tarjeta ArduinoDocument137 pagesEvaluación de Sensores para Su Conexión A Tarjeta Arduinopaco1805No ratings yet
- Antologia de MicrocontroladoresDocument128 pagesAntologia de MicrocontroladorestopotopoNo ratings yet
- Rubrica de Evaluacion de Reporte de Practica - ISAM-1Document2 pagesRubrica de Evaluacion de Reporte de Practica - ISAM-1LuisNo ratings yet
- Autómatas ProgramablesDocument21 pagesAutómatas ProgramablesHipolito CarbajalNo ratings yet
- Enclavamiento Del ContactorDocument7 pagesEnclavamiento Del ContactorRICARDO SUASNAVAS100% (1)
- Cómo Hacer Un Calentador Inductivo de Manera Fácil Con El Funcionamiento ExplicadoDocument6 pagesCómo Hacer Un Calentador Inductivo de Manera Fácil Con El Funcionamiento ExplicadoPaul Richard Mamani Mamani0% (1)
- Controladores Logicos ProgramablesDocument8 pagesControladores Logicos ProgramablesJesus Ivan MaciasNo ratings yet
- Dispositivos MecánicosDocument8 pagesDispositivos MecánicosEnrique CastilloNo ratings yet
- Manual Electronica de Potencia PDFDocument54 pagesManual Electronica de Potencia PDFAniceto Fernandez LimachiNo ratings yet
- Mecánica para La AutomatizaciónDocument25 pagesMecánica para La AutomatizaciónRuy GallegosNo ratings yet
- Laboratorio de Maquinas Electricas IiDocument11 pagesLaboratorio de Maquinas Electricas IiGianfranco DucksNo ratings yet
- Brazo Robotico AutonomoDocument79 pagesBrazo Robotico Autonomojluispin1No ratings yet
- Instala y Programa PIC SDocument9 pagesInstala y Programa PIC SAndrés Gilberto Catalán HernándezNo ratings yet
- Eler11 PDFDocument8 pagesEler11 PDFAbraham Sanchez DelCampoNo ratings yet
- The PolyVision Driver User GuideDocument70 pagesThe PolyVision Driver User GuideRaul Francisco Hernandez MurciaNo ratings yet
- Secuencia Didáctica 3 de Programa MicrocontroladoresDocument8 pagesSecuencia Didáctica 3 de Programa Microcontroladorestriac135No ratings yet
- Practica Final CADDocument6 pagesPractica Final CADAlejaandro LozanoNo ratings yet
- Practica Final CADDocument6 pagesPractica Final CADAlejaandro LozanoNo ratings yet
- Sensor de Fuego y AmplificadoresDocument20 pagesSensor de Fuego y AmplificadoresEsteban CamachoNo ratings yet
- Horario I Ciclo 2021-2Document29 pagesHorario I Ciclo 2021-2Wilper Maurilio Faya CastroNo ratings yet
- Tengo TalentosDocument2 pagesTengo TalentosJuliana vanegasNo ratings yet
- Psico Experimento 2 EntregaDocument18 pagesPsico Experimento 2 EntregabarrigodzilaNo ratings yet
- MasajeDocument2 pagesMasajeDaniel RiosNo ratings yet
- Función PrimitivaDocument8 pagesFunción PrimitivaJose Antonio Trejo CastellanosNo ratings yet
- Temperatura y CalorDocument35 pagesTemperatura y CalorJeam Jonathan Cabanillas CordovaNo ratings yet
- Examen Sexto Grado 1Document11 pagesExamen Sexto Grado 1Carmen CastanedaNo ratings yet
- Antologia P.O.O.Document18 pagesAntologia P.O.O.anyelik__No ratings yet
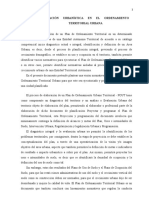
- Instrumentacion Urbanistica N El Ordenamiento TerritorialDocument2 pagesInstrumentacion Urbanistica N El Ordenamiento TerritorialAdalith Rivera PiconNo ratings yet
- Hidro Las VacasDocument62 pagesHidro Las VacasHenry AguilarNo ratings yet
- Sistemas MonoliticosDocument4 pagesSistemas MonoliticosAnthony Tafur BlancoNo ratings yet
- Instrumento de Evaluación N°2 Sena AmbientalDocument3 pagesInstrumento de Evaluación N°2 Sena AmbientalErika AgudeloNo ratings yet
- Ley 962 de 2005Document48 pagesLey 962 de 2005GeltRegion3No ratings yet
- Estructura Organizacional. DepartamentalizacionDocument18 pagesEstructura Organizacional. Departamentalizaciondulcemiel013No ratings yet
- cgb063 PDFDocument20 pagescgb063 PDFMon IsNo ratings yet
- Taller - 02 - Doc Com Evi - HSEQ - Sep 18Document4 pagesTaller - 02 - Doc Com Evi - HSEQ - Sep 18Maria Andrea PizarroNo ratings yet
- Jared Guerrero - Test Montaje y MantenimientoDocument2 pagesJared Guerrero - Test Montaje y MantenimientoLuifran MontoyaNo ratings yet
- San Jacinto 1Document4 pagesSan Jacinto 1Sami Al-GhorabNo ratings yet
- Manual Uso Caldera Condensacion Hermann Micra Plus Condens 25Document20 pagesManual Uso Caldera Condensacion Hermann Micra Plus Condens 25Maria Hernandez100% (1)
- MD Salud Publica 1Document16 pagesMD Salud Publica 1avengersrm 2019No ratings yet
- Aban CayDocument216 pagesAban CayAlmendra RosalesNo ratings yet
- Etnografia y Folklore de AncomarcaDocument18 pagesEtnografia y Folklore de AncomarcatacnaperuNo ratings yet
- Delincuencia en BogotaDocument26 pagesDelincuencia en BogotaAshleZamudioNo ratings yet
- Final IA 2012-1Document8 pagesFinal IA 2012-1raged huaman cernaNo ratings yet