You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
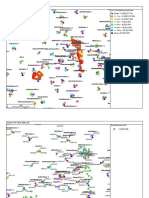
- 2G Drive Test Plot - Sites Serving IT DeptDocument4 pages2G Drive Test Plot - Sites Serving IT DeptRavi ShuklaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Switching Power Supply Design Review - 60 Watt Flyback Regulator by Raoji Patel and Glen FRFTZ Slup072Document17 pagesSwitching Power Supply Design Review - 60 Watt Flyback Regulator by Raoji Patel and Glen FRFTZ Slup072Burlacu AndreiNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Siemens Arcadis Avantic Installations LaserIIDocument22 pagesSiemens Arcadis Avantic Installations LaserIINelson AltuveNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Electrical Safety For Laboratory WorkersDocument11 pagesElectrical Safety For Laboratory WorkersABELWALIDNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Magnavox 32MF338BDocument93 pagesMagnavox 32MF338BJames SouthNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- W810i Service ManualDocument53 pagesW810i Service Manualamdomalik100% (2)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 70115e DA42 NG AFM r2 CompleteDocument408 pages70115e DA42 NG AFM r2 CompleteJosh KrishaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Xiaomi becomes world's third largest smartphone makerDocument8 pagesXiaomi becomes world's third largest smartphone makerBodaKatalinNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Eece488 Set1 2up PDFDocument42 pagesEece488 Set1 2up PDFRammohanreddy RajidiNo ratings yet
- Isa S84.01 SisDocument110 pagesIsa S84.01 SisAlejandro EspinosaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Measuring The Specific Latent Heat of Fusion of Ice: Background InformationDocument3 pagesMeasuring The Specific Latent Heat of Fusion of Ice: Background InformationPaul DhuNo ratings yet
- J5200Document5 pagesJ5200Yan TyNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Wrfase Acceptance Letter 360 PDFDocument3 pagesWrfase Acceptance Letter 360 PDFRizka SeptianaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- BCI184FDocument8 pagesBCI184F3efooNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- C4 Service ManualDocument23 pagesC4 Service ManualDany Coello LeónNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- DX DiagDocument11 pagesDX DiagNazakat HussainNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Catalogue 170M6546Document1 pageCatalogue 170M6546Huỳnh Trung ChinhNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Definition of operating modes and transmission fault codesDocument22 pagesDefinition of operating modes and transmission fault codesAhmetNo ratings yet
- Power Transistors 2SD2255 GuideDocument4 pagesPower Transistors 2SD2255 Guidebookreader1968No ratings yet
- Digital StethoscopeDocument28 pagesDigital StethoscopeHimanshu SaxenaNo ratings yet
- Manage Signal Cables EffectivelyDocument13 pagesManage Signal Cables Effectively4493464No ratings yet
- AzDocument106 pagesAzapi-3812322100% (2)
- Simoreg DC Master: Application SIMOREG For DC-Motor Generator Set ControlDocument24 pagesSimoreg DC Master: Application SIMOREG For DC-Motor Generator Set Controlanas raddawiNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- XC6204/XC6205: General DescriptionDocument51 pagesXC6204/XC6205: General DescriptionMilan ĐorđevicNo ratings yet
- Copeland CRN5 0500 PFV 970 Submittal SheetDocument1 pageCopeland CRN5 0500 PFV 970 Submittal SheetAronis serranoNo ratings yet
- zx80 81 RefcardDocument8 pageszx80 81 RefcardbrooknetNo ratings yet
- A1500 PR e 1 03Document83 pagesA1500 PR e 1 03icoviny100% (1)
- BRKSPM 2032Document33 pagesBRKSPM 2032luong vyNo ratings yet
- 3.6.2 Radiation 00-10Document16 pages3.6.2 Radiation 00-10Murray PhysicsNo ratings yet
- TR-808 Snare DIY perfboard layout <40Document12 pagesTR-808 Snare DIY perfboard layout <40dse666No ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)