You might also like
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- Ansys Aqwa User Manual 2.4.1Document8 pagesAnsys Aqwa User Manual 2.4.1ODG_290473No ratings yet
- Hydrodynamics Analysis of Ships Side By-Cfd PDFDocument33 pagesHydrodynamics Analysis of Ships Side By-Cfd PDFastudespusNo ratings yet
- Generating Spectral RAOsDocument4 pagesGenerating Spectral RAOsSalvatore MonacoNo ratings yet
- Accurately Predicting Hydrodynamic Loads on ROVsDocument6 pagesAccurately Predicting Hydrodynamic Loads on ROVsDavid ThomsonNo ratings yet
- Offshore Subsea Construction Vessel Skandi SantosDocument2 pagesOffshore Subsea Construction Vessel Skandi SantosAlexNo ratings yet
- User Guide: Siemens PLM SoftwareDocument32 pagesUser Guide: Siemens PLM Softwareabc123go100% (1)
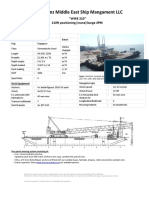
- Allianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMDocument2 pagesAllianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMCyril J PadiyathNo ratings yet
- Froude-Krylov Force CoefficientDocument20 pagesFroude-Krylov Force CoefficientLazaros NtoanidisNo ratings yet
- Maheswaran Jeron PDFDocument228 pagesMaheswaran Jeron PDFRohan KarandeNo ratings yet
- Ilide - Info Aqwa Theory Manual PRDocument168 pagesIlide - Info Aqwa Theory Manual PRGabriel BaroniNo ratings yet
- Mooring OverviewDocument36 pagesMooring OverviewRAUL GALDONo ratings yet
- Case Studies For Evaluating Hydrodynamic Motion Responses Using MOSESDocument26 pagesCase Studies For Evaluating Hydrodynamic Motion Responses Using MOSESATLURI SATYA SRINIVAS oe13m002No ratings yet
- Global Offshore Rig Construction Market Research Report To 2018Document23 pagesGlobal Offshore Rig Construction Market Research Report To 2018kenresearch12No ratings yet
- Motion of Three Offshore Structures Due To The Effect of Hydrodynamic InteractionDocument11 pagesMotion of Three Offshore Structures Due To The Effect of Hydrodynamic InteractionMuhammad Farid Abdul HalimNo ratings yet
- LR Seasafe SoftwareDocument9 pagesLR Seasafe SoftwaredsrfgNo ratings yet
- Installation of Steel and Flexible Pipelines in Sideway CurrentDocument144 pagesInstallation of Steel and Flexible Pipelines in Sideway CurrentJohari A. KasimNo ratings yet
- ANSYS Aqwa Suite Articulations & Multi-body ProblemsDocument9 pagesANSYS Aqwa Suite Articulations & Multi-body ProblemsPatrick SilvaNo ratings yet
- OpenWEC ManualDocument10 pagesOpenWEC ManualSaishuai DaiNo ratings yet
- H.O. Berteaux Et Al. Heave and Roll Response of Free Floating Bodies of Cylindrical ShapeDocument149 pagesH.O. Berteaux Et Al. Heave and Roll Response of Free Floating Bodies of Cylindrical ShapeYuriyAKNo ratings yet
- OLF - NSA Guidelines For Safe Handling and TowingDocument22 pagesOLF - NSA Guidelines For Safe Handling and TowingTomash VerbitskyNo ratings yet
- Ansys Aqwa (Overview)Document10 pagesAnsys Aqwa (Overview)Anggoronadhi Dianiswara100% (1)
- Sesam Webinar - Complete Structural Analysis For Floating OWT - QA - tcm8-105379Document9 pagesSesam Webinar - Complete Structural Analysis For Floating OWT - QA - tcm8-105379samiransmitaNo ratings yet
- Aqwa LineDocument153 pagesAqwa LineEl riza annaml100% (1)
- A01 Catenary and Wave SystemsDocument14 pagesA01 Catenary and Wave SystemsNithin KannanNo ratings yet
- Fatigue Methods PDFDocument91 pagesFatigue Methods PDFGodwin100% (1)
- OMAE2012 84121 PresentationDocument16 pagesOMAE2012 84121 PresentationsojanvasudevanNo ratings yet
- Thesis Report EAF Pigeaud PS Platform DesignDocument142 pagesThesis Report EAF Pigeaud PS Platform DesignPrathamesh OmtechNo ratings yet
- Structural analysis of offloading hose platform for green sea and wave loadsDocument33 pagesStructural analysis of offloading hose platform for green sea and wave loadsPavan RayNo ratings yet
- Cross Sea Detection Based On Synthetic Aperture Radar (Sar) Data and Numerical Wave Model (Wam)Document6 pagesCross Sea Detection Based On Synthetic Aperture Radar (Sar) Data and Numerical Wave Model (Wam)Gautam SudhirNo ratings yet
- CFD Fluent en El Casco DTMB 5415Document34 pagesCFD Fluent en El Casco DTMB 5415klzsailingNo ratings yet
- Global Analysis of A Flexible RiserDocument7 pagesGlobal Analysis of A Flexible RiserfdoppelNo ratings yet
- Response Amplitude Operator - Wikipedia, The Free EncyclopediaDocument3 pagesResponse Amplitude Operator - Wikipedia, The Free EncyclopediaFuadNo ratings yet
- Ansys Aqwa Reference ManualDocument4 pagesAnsys Aqwa Reference ManualRidzky RamdhaniNo ratings yet
- Sotra Anchor and ChainDocument164 pagesSotra Anchor and ChainX-Titan Wan de Pirates100% (2)
- Pull in AnalysisDocument4 pagesPull in Analysisgvsha88No ratings yet
- Vessel Motions and Mooring Line Tensions in Very Shallow WaterDocument91 pagesVessel Motions and Mooring Line Tensions in Very Shallow WaterPatrick SilvaNo ratings yet
- Column-Stabilised Units: Recommended Practice DNV-RP-C103Document30 pagesColumn-Stabilised Units: Recommended Practice DNV-RP-C103Alfonso MoriñigoNo ratings yet
- OrcaFlex Demonstration IIT MadrasDocument11 pagesOrcaFlex Demonstration IIT MadrasvigambetkarNo ratings yet
- Maximizing reuse of offshore mattressesDocument94 pagesMaximizing reuse of offshore mattressesmey naibahoNo ratings yet
- Chapter 5 - Seakeeping ModelsDocument44 pagesChapter 5 - Seakeeping ModelsSahil Jawa100% (1)
- Ultramarine Moses CrackDocument3 pagesUltramarine Moses CrackpothirajkalyanNo ratings yet
- Optimized Design For TSHDs Swell CompensatorDocument13 pagesOptimized Design For TSHDs Swell CompensatorTomasz FelknerNo ratings yet
- MENCK Catalog - Eng - A PDFDocument7 pagesMENCK Catalog - Eng - A PDFluluNo ratings yet
- Chapter 5 - Seakeeping TheoryDocument31 pagesChapter 5 - Seakeeping TheoryWilson Toncel ZuletaNo ratings yet
- 013-MOSES Manual PDFDocument455 pages013-MOSES Manual PDFAnwarul Shafiq AwalludinNo ratings yet
- Bouckaert, Et Al, A Life Cycle Cost Analysis of The Application of A Hull Vane To An Offshore Patrol Vessel (FAST2105)Document10 pagesBouckaert, Et Al, A Life Cycle Cost Analysis of The Application of A Hull Vane To An Offshore Patrol Vessel (FAST2105)joene3No ratings yet
- Tipe perlengkap pengerukanDocument15 pagesTipe perlengkap pengerukanfathurahmad 2205No ratings yet
- Wajac StandardDocument22 pagesWajac StandardajayNo ratings yet
- Recent Developments of FAST For Modelling Offshore Wind TurbinesDocument11 pagesRecent Developments of FAST For Modelling Offshore Wind TurbinesJACKNo ratings yet
- ACE Platforms 0801Document4 pagesACE Platforms 0801Ruslan ZakirovNo ratings yet
- Bonga Pipe in Pipe LayDocument66 pagesBonga Pipe in Pipe LayWilliam O OkolotuNo ratings yet
- Structural Design and Cost Factors in Submersible Vehicle DevelopmentDocument49 pagesStructural Design and Cost Factors in Submersible Vehicle DevelopmentMuhammad Rafi SiratNo ratings yet
- Marine 2017 18 - Propeller Nozzles DesignDocument13 pagesMarine 2017 18 - Propeller Nozzles DesignMaciej ReichelNo ratings yet
- Australian Maritime College - Sizing of Catenary Mooring LinesDocument14 pagesAustralian Maritime College - Sizing of Catenary Mooring LinesAnwarul Shafiq AwalludinNo ratings yet
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityFrom EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityNo ratings yet
- Practical Design of Rudders - PARTB-1Document40 pagesPractical Design of Rudders - PARTB-1Shikha Bordia83% (6)
- Ship Design For Efficiency and Economy-7-226-61-65Document5 pagesShip Design For Efficiency and Economy-7-226-61-65galin8575No ratings yet
- Cote Vol 4Document122 pagesCote Vol 4moriel13No ratings yet
- Linux - Notes by Jitendra SirDocument125 pagesLinux - Notes by Jitendra SirgoyaltarunNo ratings yet
- Reading Process Theories: Bottom-Up Model Interactive Model Top-Down ModelDocument2 pagesReading Process Theories: Bottom-Up Model Interactive Model Top-Down ModelBeverly Panganiban CadacioNo ratings yet
- (JPP-1) - (Indefinite Integration) - 11th SepDocument52 pages(JPP-1) - (Indefinite Integration) - 11th Sepfunnyvideos. comNo ratings yet
- Alice Inteligencia Artificial Promoting The Adoption and Development of Alicebot and AIML Free SoftwareDocument43 pagesAlice Inteligencia Artificial Promoting The Adoption and Development of Alicebot and AIML Free SoftwareBruno Silveira DinizNo ratings yet
- Tanks Lecture 3Document70 pagesTanks Lecture 3zikzak2011No ratings yet
- Convention of Film Blocking Day 2Document6 pagesConvention of Film Blocking Day 2GENELYN GAWARANNo ratings yet
- Muhammad Usama: Internship at Ibrahim Fibres Limited, Polyester PlantDocument20 pagesMuhammad Usama: Internship at Ibrahim Fibres Limited, Polyester PlantUsamaNo ratings yet
- STT041 and STT041.1 PDFDocument59 pagesSTT041 and STT041.1 PDFHayrah Lawi100% (2)
- Performance Task 1 - Attempt Review RSCH 122Document6 pagesPerformance Task 1 - Attempt Review RSCH 122John Dexter LanotNo ratings yet
- Pediatric Nurse Cover LetterDocument5 pagesPediatric Nurse Cover Letterafjwoovfsmmgff100% (2)
- Irene Muliawan: Tarumanagara University - Bachelor of Accountancy - Aug 2016 - Jan 2020Document1 pageIrene Muliawan: Tarumanagara University - Bachelor of Accountancy - Aug 2016 - Jan 2020naboyaNo ratings yet
- 3rd Year MBBS Assessment in 3 BlocksDocument5 pages3rd Year MBBS Assessment in 3 BlocksEngecoon AcademyNo ratings yet
- Altamirov DishniDocument95 pagesAltamirov DishniEmersonJParedes100% (1)
- Rt380T 230/400 PCB Rohs: Analog Three-Phase Thyristor Trigger ModuleDocument3 pagesRt380T 230/400 PCB Rohs: Analog Three-Phase Thyristor Trigger ModuleFelipe CasasNo ratings yet
- Sap StoDocument7 pagesSap StoPavilion67% (3)
- Reportte Cambios CPC 2a1Document1 pageReportte Cambios CPC 2a1FERNANDO FERRUSCANo ratings yet
- An Urgent Need To Modernize: Public Health Data Modernization InitiativeDocument2 pagesAn Urgent Need To Modernize: Public Health Data Modernization InitiativeRyza Jazid BaharNo ratings yet
- Dogtooth Film ReviewDocument6 pagesDogtooth Film ReviewAstrid JohnsonNo ratings yet
- Arun GangwarDocument7 pagesArun GangwarArun GangwarNo ratings yet
- KPMG - India's Digital Future Media and Entertainment Report 2019Document256 pagesKPMG - India's Digital Future Media and Entertainment Report 2019Online IngNo ratings yet
- Rule 4 - Types of Construction (Book Format)Document2 pagesRule 4 - Types of Construction (Book Format)Thea AbelardoNo ratings yet
- Rutherford Gate Condominiums BLDG C Feature SheetDocument2 pagesRutherford Gate Condominiums BLDG C Feature SheetCarringtonNo ratings yet
- Introduction To Critical Reading SkillsDocument4 pagesIntroduction To Critical Reading SkillsParlindungan PardedeNo ratings yet
- Physical Properties of SolutionsDocument23 pagesPhysical Properties of Solutions董青天No ratings yet
- Housing TypesDocument14 pagesHousing Typessushmita hazarikaNo ratings yet
- This Study Resource Was: Question AnswersDocument3 pagesThis Study Resource Was: Question AnswerskamakshiNo ratings yet
- Biology Thesis by SlidesgoDocument39 pagesBiology Thesis by SlidesgoKristian Hezekiah DuyoganNo ratings yet
- ChironDocument13 pagesChironGP100% (1)
- Safety and Security Manual For Safety Manager SCDocument101 pagesSafety and Security Manual For Safety Manager SCk2tzgwmsc5No ratings yet