You might also like
- Internet of Things TutorialDocument53 pagesInternet of Things Tutorialboka987100% (1)
- Wearable (1) : Smart Glass Activity TrackerDocument4 pagesWearable (1) : Smart Glass Activity Trackerponmalar2No ratings yet
- Definitions OfiotDocument16 pagesDefinitions Ofiotponmalar2No ratings yet
- Wearable (1) : Smart Glass Activity TrackerDocument4 pagesWearable (1) : Smart Glass Activity Trackerponmalar2No ratings yet
- Internet of Things TutorialDocument53 pagesInternet of Things Tutorialboka987100% (1)
- Wearable (1) : Smart Glass Activity TrackerDocument4 pagesWearable (1) : Smart Glass Activity Trackerponmalar2No ratings yet
- Definitions OfiotDocument16 pagesDefinitions Ofiotponmalar2No ratings yet
- Image Compression Using Block Truncation CodingDocument5 pagesImage Compression Using Block Truncation CodingCyberJournals MultidisciplinaryNo ratings yet
- Mechanisms of Antimicrobial Resistance in BacteriaDocument8 pagesMechanisms of Antimicrobial Resistance in BacteriaWida YatiNo ratings yet
- Test PDFDocument1 pageTest PDFponmalar2No ratings yet
- A Segmented Wavelet Inspired Neural Network Approach To Compress ImagesDocument11 pagesA Segmented Wavelet Inspired Neural Network Approach To Compress Imagesponmalar2No ratings yet
- Misrimal Navajee Munoth Jain Engineering College, Chennai - 97Document21 pagesMisrimal Navajee Munoth Jain Engineering College, Chennai - 97ponmalar2No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Rapid History Taking: 1. Patient ProfileDocument3 pagesRapid History Taking: 1. Patient ProfileTunio UsamaNo ratings yet
- CERADocument10 pagesCERAKeren Margarette AlcantaraNo ratings yet
- Student Exploration: Magnetism (Find Gizmo Icon On Eclass)Document4 pagesStudent Exploration: Magnetism (Find Gizmo Icon On Eclass)Abdel Majeed Tuffaha0% (1)
- Global Title Format: ITU-T Recommendation Q.713Document4 pagesGlobal Title Format: ITU-T Recommendation Q.713Pravesh Kumar ThakurNo ratings yet
- Format Mini Lesson Plan: What Is Narrative Text?Document3 pagesFormat Mini Lesson Plan: What Is Narrative Text?Muhammad FahrurajiNo ratings yet
- Another Look at Pistis ChristouDocument17 pagesAnother Look at Pistis Christouakimel100% (1)
- Register A Custom Table in Apps SchemaDocument5 pagesRegister A Custom Table in Apps SchemaIapps ErpSolutionsNo ratings yet
- Course: Consumer Behaviour: Relaunching of Mecca Cola in PakistanDocument10 pagesCourse: Consumer Behaviour: Relaunching of Mecca Cola in PakistanAnasAhmedNo ratings yet
- DEH-X500BT DEH-S4150BT: CD Rds Receiver Receptor de CD Con Rds CD Player Com RdsDocument53 pagesDEH-X500BT DEH-S4150BT: CD Rds Receiver Receptor de CD Con Rds CD Player Com RdsLUIS MANUEL RINCON100% (1)
- 1.4 BG00381946 - ADocument1 page1.4 BG00381946 - AAnand KesarkarNo ratings yet
- Recovering The Snorra Edda On Playing Gods, Loki, and The Importance of HistoryDocument17 pagesRecovering The Snorra Edda On Playing Gods, Loki, and The Importance of HistoryM SNo ratings yet
- Low Voltage Alternator - 4 Pole: 25 To 60 kVA - 50 HZ / 31.5 To 75 kVA - 60 HZ Electrical and Mechanical DataDocument12 pagesLow Voltage Alternator - 4 Pole: 25 To 60 kVA - 50 HZ / 31.5 To 75 kVA - 60 HZ Electrical and Mechanical DataDjamel BeddarNo ratings yet
- Commissioning 1. Commissioning: ES200 EasyDocument4 pagesCommissioning 1. Commissioning: ES200 EasyMamdoh EshahatNo ratings yet
- How Do I Predict Event Timing Saturn Nakshatra PDFDocument5 pagesHow Do I Predict Event Timing Saturn Nakshatra PDFpiyushNo ratings yet
- Musical InstrumentsDocument23 pagesMusical Instrumentssirius scottNo ratings yet
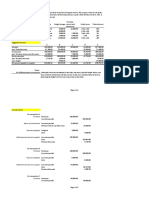
- Handout No. 03 - Purchase TransactionsDocument4 pagesHandout No. 03 - Purchase TransactionsApril SasamNo ratings yet
- Tle10 Cookery DLL Q1-Week1 Sy2022-2023Document4 pagesTle10 Cookery DLL Q1-Week1 Sy2022-2023Edmar S AguilarNo ratings yet
- Sagittarius ProfileDocument3 pagesSagittarius ProfileWAQAS SHARIFNo ratings yet
- RP Poster FinalDocument1 pageRP Poster Finalapi-270795195No ratings yet
- Ringleman Chart FlareDocument12 pagesRingleman Chart FlareguhadebasisNo ratings yet
- Thesis Final 2 Number c1-c5Document167 pagesThesis Final 2 Number c1-c5Kimverly DomaganNo ratings yet
- CNL DivisionDocument38 pagesCNL DivisionaniketnareNo ratings yet
- Final Project Part-3 Marketing PlanDocument8 pagesFinal Project Part-3 Marketing PlanIam TwinStormsNo ratings yet
- Unit 8 Atomic Fluorescence Spectrometry PDFDocument23 pagesUnit 8 Atomic Fluorescence Spectrometry PDFCh AswadNo ratings yet
- Sculpture and ArchitectureDocument9 pagesSculpture and ArchitectureIngrid Dianne Luga BernilNo ratings yet
- Estimation of Measurement Uncertainty For Electrical Conductivity in WaterDocument4 pagesEstimation of Measurement Uncertainty For Electrical Conductivity in WaterMaruthi KNo ratings yet
- Sap Business Objects Edge Series 3.1 Install Windows enDocument104 pagesSap Business Objects Edge Series 3.1 Install Windows enGerardoNo ratings yet
- Effect of Social Economic Factors On Profitability of Soya Bean in RwandaDocument7 pagesEffect of Social Economic Factors On Profitability of Soya Bean in RwandaMarjery Fiona ReyesNo ratings yet
- Republic of The Philippines Department of Education Deped Complex, Pasig City Science Iii K To 12 Curriculum Guide Planner / Budget of WorkDocument3 pagesRepublic of The Philippines Department of Education Deped Complex, Pasig City Science Iii K To 12 Curriculum Guide Planner / Budget of WorkLedie Lou Cetoy SuperalesNo ratings yet
- PTPL Ir 2018Document383 pagesPTPL Ir 2018Guan WenhaiNo ratings yet