You might also like
- British Warships of the Second World War: Detailed in the Original Builders' PlansFrom EverandBritish Warships of the Second World War: Detailed in the Original Builders' PlansRating: 4 out of 5 stars4/5 (2)
- Analysis of Submarine With The Study of MechanicalDocument12 pagesAnalysis of Submarine With The Study of MechanicalAsser EhabNo ratings yet
- Electromagnetic Aircraft Launch SystemDocument10 pagesElectromagnetic Aircraft Launch SystemVed Prakash SinghNo ratings yet
- The Sea and the Second World War: Maritime Aspects of a Global ConflictFrom EverandThe Sea and the Second World War: Maritime Aspects of a Global ConflictNo ratings yet
- Combat in the Sky: Airpower and the Defense of North Vietnam, 1965-1973From EverandCombat in the Sky: Airpower and the Defense of North Vietnam, 1965-1973No ratings yet
- Submarine DesignDocument2 pagesSubmarine DesignEhsan AmiriNo ratings yet
- Absalon And Esbern Snare. The Danish Navy’s Support Ships Of The Absalon ClassFrom EverandAbsalon And Esbern Snare. The Danish Navy’s Support Ships Of The Absalon ClassRating: 5 out of 5 stars5/5 (1)
- Vietnam from Cease-Fire to Capitulation [Illustrated Edition]From EverandVietnam from Cease-Fire to Capitulation [Illustrated Edition]Rating: 4 out of 5 stars4/5 (1)
- Active Aeroelastic Wing: Improve Aircraft Maneuverability at Transonic and Supersonic SpeedsFrom EverandActive Aeroelastic Wing: Improve Aircraft Maneuverability at Transonic and Supersonic SpeedsNo ratings yet
- GateRudder JMST 2015 PDFDocument13 pagesGateRudder JMST 2015 PDFθανασης ΓκιοκαςNo ratings yet
- BMT Defence Services Aegir-18RDocument2 pagesBMT Defence Services Aegir-18RLobbyist_Myo100% (1)
- Becoming the Arsenal: The American Industrial Mobilization for World War II, 1938-1942From EverandBecoming the Arsenal: The American Industrial Mobilization for World War II, 1938-1942No ratings yet
- Naval Innovation for the 21st Century: The Office of Naval Research Since the End of the Cold WarFrom EverandNaval Innovation for the 21st Century: The Office of Naval Research Since the End of the Cold WarNo ratings yet
- Artificial Intelligence Arms Race: Fundamentals and ApplicationsFrom EverandArtificial Intelligence Arms Race: Fundamentals and ApplicationsNo ratings yet
- Rockets and Missiles Over Ukraine: The Changing Face of BattleFrom EverandRockets and Missiles Over Ukraine: The Changing Face of BattleNo ratings yet
- High Level Architecture Based Simulation For Aircraft Carrier Deck Operations PDFDocument5 pagesHigh Level Architecture Based Simulation For Aircraft Carrier Deck Operations PDFjwpaprk1No ratings yet
- Liquid Propellant Gun For MBTDocument112 pagesLiquid Propellant Gun For MBTGreg JacksonNo ratings yet
- Submarines and SubmersiblesDocument28 pagesSubmarines and Submersiblespraveench1888No ratings yet
- Methods of Radar Cross-section AnalysisFrom EverandMethods of Radar Cross-section AnalysisJ.W. Jr. CrispinNo ratings yet
- Analysis of G LEO Kinetic Bombardment AnDocument28 pagesAnalysis of G LEO Kinetic Bombardment AnpsuedonymousNo ratings yet
- Introduction To Submarine Design PDFDocument6 pagesIntroduction To Submarine Design PDFradu tiberiuNo ratings yet
- HMS Queen ElizabethDocument14 pagesHMS Queen Elizabethswetha100% (1)
- (Buckling) Analysis of A Submarine With Hull ImperfectionsDocument81 pages(Buckling) Analysis of A Submarine With Hull ImperfectionsJhon DonNo ratings yet
- Worlds Biggest SubmarineDocument1 pageWorlds Biggest SubmarineBlack ShadowNo ratings yet
- The Patricia Lynn Project: Vietnam War, the Early Years of Air IntelligenceFrom EverandThe Patricia Lynn Project: Vietnam War, the Early Years of Air IntelligenceNo ratings yet
- Bounce Sonar Submarine: Bottom ArrayDocument14 pagesBounce Sonar Submarine: Bottom ArrayBib GmzNo ratings yet
- Surviving the Ride: A Pictorial History of South African-Manufactured Armoured VehiclesFrom EverandSurviving the Ride: A Pictorial History of South African-Manufactured Armoured VehiclesNo ratings yet
- Weapons Systems For Wheeled/Tracked Vehicles 5Th Generation AirpowerDocument28 pagesWeapons Systems For Wheeled/Tracked Vehicles 5Th Generation AirpowerPEpu100% (1)
- Auv Electric Propulsion Subsea ModulesDocument2 pagesAuv Electric Propulsion Subsea ModulesMol MolNo ratings yet
- Atmospheric Satellite: The Solar-powered Drone for Providing Internet Access to Remote AreasFrom EverandAtmospheric Satellite: The Solar-powered Drone for Providing Internet Access to Remote AreasNo ratings yet
- Olympic Titanic Britannic: The anatomy and evolution of the Olympic ClassFrom EverandOlympic Titanic Britannic: The anatomy and evolution of the Olympic ClassNo ratings yet
- Unmanned Aircraft SystemsFrom EverandUnmanned Aircraft SystemsElla AtkinsNo ratings yet
- Sub MarineDocument24 pagesSub MarineDenbe SantosNo ratings yet
- History of Submarine CompositesDocument16 pagesHistory of Submarine CompositesYakob Kher AldenNo ratings yet
- Voyage Of The Deutschland, The First Merchant SubmarineFrom EverandVoyage Of The Deutschland, The First Merchant SubmarineNo ratings yet
- Astute Class SubmarineDocument6 pagesAstute Class SubmarinerbnaoNo ratings yet
- Inal Industries Mk-80 Series Bomb HardwareDocument8 pagesInal Industries Mk-80 Series Bomb Hardwareinal EnterprisesNo ratings yet
- Design Optimization of Composite Submarine Pressure HullDocument4 pagesDesign Optimization of Composite Submarine Pressure HullInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- From Auster to Apache: The History of 656 Squadron RAF/ACC 1942–2012From EverandFrom Auster to Apache: The History of 656 Squadron RAF/ACC 1942–2012No ratings yet
- Submarine 2 PDFDocument33 pagesSubmarine 2 PDFChristian Mavarez100% (1)
- 2008 Submarine Almanac: Naval Stories, Submarines History, and Game Development From Experts and EnthusiastsFrom Everand2008 Submarine Almanac: Naval Stories, Submarines History, and Game Development From Experts and EnthusiastsNo ratings yet
- Electromagnetic Aircraft Launch SystemDocument8 pagesElectromagnetic Aircraft Launch SystemRikhil Yalamanchi100% (1)
- China, the United States, and 21st-Century Sea Power: Defining a Maritime Security PartnershipFrom EverandChina, the United States, and 21st-Century Sea Power: Defining a Maritime Security PartnershipNo ratings yet
- SHIP SHOCK TRIAL SIMULATION OF USS Winston S. Churchill (DDG 81) SURROUNDING FLUID EFFECT PDFDocument111 pagesSHIP SHOCK TRIAL SIMULATION OF USS Winston S. Churchill (DDG 81) SURROUNDING FLUID EFFECT PDFFernando Raúl LADINONo ratings yet
- Turkey Defence Product Guide 2009Document101 pagesTurkey Defence Product Guide 2009rengab100% (1)
- A26 DatasheetDocument2 pagesA26 DatasheetVinay TigerNo ratings yet
- Ada462130 PDFDocument149 pagesAda462130 PDFmaxpattNo ratings yet
- MCWP 3-11.2 Marine Rifle SquadDocument351 pagesMCWP 3-11.2 Marine Rifle Squadbovine splendor100% (3)
- The Tanks of AugustDocument144 pagesThe Tanks of AugustihatemakingusernamesNo ratings yet
- Development of The World's Fastest BattleshipsDocument17 pagesDevelopment of The World's Fastest Battleshipssea.shadowNo ratings yet
- Development of The World's Fastest BattleshipsDocument17 pagesDevelopment of The World's Fastest Battleshipssea.shadowNo ratings yet
- Development of The World's Fastest BattleshipsDocument17 pagesDevelopment of The World's Fastest Battleshipssea.shadowNo ratings yet
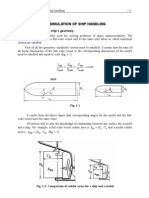
- Chapter - 01-Simulation of Ship HandlingDocument5 pagesChapter - 01-Simulation of Ship Handlingsea.shadowNo ratings yet
- List of Dgca Approved Flying Training Organisations As On 28.10.2020Document6 pagesList of Dgca Approved Flying Training Organisations As On 28.10.2020Sai Charan A320No ratings yet
- EDDF Airport InfoDocument1 pageEDDF Airport InfoMuhammad hamzaNo ratings yet
- National Airspace System: FIT Aviation, LLC - College of AeronauticsDocument34 pagesNational Airspace System: FIT Aviation, LLC - College of AeronauticsMadeleine AguilarNo ratings yet
- DC-10-30-beta - KLMDocument20 pagesDC-10-30-beta - KLMDina HishamNo ratings yet
- Ten Points For Safe LiftDocument8 pagesTen Points For Safe LifthazopmanNo ratings yet
- Corrosion Fatigiue ModellingDocument89 pagesCorrosion Fatigiue Modellingpipedown456No ratings yet
- 747Document12 pages747GurdevBaines100% (3)
- Steel Pipes and Maximum Water Flow CapacityDocument1 pageSteel Pipes and Maximum Water Flow CapacitymishikhanNo ratings yet
- The Impact of Control TechnologyDocument246 pagesThe Impact of Control TechnologyMarcos Israel Galicia CuevaNo ratings yet
- Ccom - Atr72Document153 pagesCcom - Atr72Rafid Al Islam100% (3)
- (A) Allowed For All CHB Dwelling Units (Flats & Independent Houses)Document6 pages(A) Allowed For All CHB Dwelling Units (Flats & Independent Houses)GURMUKH SINGHNo ratings yet
- Chap 2Document2 pagesChap 2Qassem MohaidatNo ratings yet
- Anit-Collision Systems PDFDocument1 pageAnit-Collision Systems PDFAnjoNo ratings yet
- Echivalari Analize Completari GCDocument6 pagesEchivalari Analize Completari GCDiana FlorinaNo ratings yet
- Safe Wings Edition 28 SEPTEMBER 2014 PDFDocument12 pagesSafe Wings Edition 28 SEPTEMBER 2014 PDFAICL FOQANo ratings yet
- Caab Atpl Requirement PamphletDocument5 pagesCaab Atpl Requirement PamphletblessedbuddhaNo ratings yet
- Applied Electronics Paper - IV: B.E. Sixth Semester (Aeronautical Engineering) (C.B.S.)Document2 pagesApplied Electronics Paper - IV: B.E. Sixth Semester (Aeronautical Engineering) (C.B.S.)Sourav SawarnNo ratings yet
- Flying Cars May Be Wave of The FutureDocument7 pagesFlying Cars May Be Wave of The FutureAditya MNo ratings yet
- Service Bulletin Atr72: Transmittal Sheet Revision No. 03Document28 pagesService Bulletin Atr72: Transmittal Sheet Revision No. 03Pradeep K sNo ratings yet
- BGD WaspDocument41 pagesBGD WaspusstbNo ratings yet
- Honeywell Aerospace FMS Platforms Supported: Find Out MoreDocument4 pagesHoneywell Aerospace FMS Platforms Supported: Find Out MoreArun SasiNo ratings yet
- Insta Grid SummaryDocument23 pagesInsta Grid SummaryShawn Paul Boike100% (2)
- Ei-16-333-A322 Rev D TSFDocument76 pagesEi-16-333-A322 Rev D TSFJoaninha nvsNo ratings yet
- Hexweb CR Iii: Corrosion Resistant Specification Grade Aluminum HoneycombDocument6 pagesHexweb CR Iii: Corrosion Resistant Specification Grade Aluminum Honeycombsahiljain_146No ratings yet
- Chap 4 RVF (Hydraulic Jump)Document34 pagesChap 4 RVF (Hydraulic Jump)Shakilla FaizalNo ratings yet
- Sperry Attitude GyroDocument3 pagesSperry Attitude Gyroriggl100% (1)
- Checklist Azul (Simulação) .Document2 pagesChecklist Azul (Simulação) .Maurilo EdsonNo ratings yet
- Course Overview: - Automatic Flight - Flight Management, Navigation - Normal OperationsDocument3 pagesCourse Overview: - Automatic Flight - Flight Management, Navigation - Normal OperationsSunil SadashivpethNo ratings yet
- CFM Leap Neo - Aviet (R)Document424 pagesCFM Leap Neo - Aviet (R)birates100% (3)
- Active Sky APIDocument23 pagesActive Sky APIPhilip JacksonNo ratings yet









![Vietnam from Cease-Fire to Capitulation [Illustrated Edition]](https://imgv2-1-f.scribdassets.com/img/word_document/321934251/149x198/6169f62cb0/1617235805?v=1)