You might also like
- Grid Power Integration Technologies For Offshore Ocean Wave EnergyDocument8 pagesGrid Power Integration Technologies For Offshore Ocean Wave EnergyCarla CoronaNo ratings yet
- 11.wind Farm To Weak-Grid ConnectionDocument47 pages11.wind Farm To Weak-Grid Connectiontulasinad123100% (1)
- Power Electronics As Efficient Interface in Dispersed Power Generation SystemsDocument11 pagesPower Electronics As Efficient Interface in Dispersed Power Generation SystemsnmotanNo ratings yet
- HVDC Connection of Offshore Wind Farms To TheDocument7 pagesHVDC Connection of Offshore Wind Farms To TheLalith KrishnanNo ratings yet
- 135-Wind Farm To Weak-Grid Connection 2003Document80 pages135-Wind Farm To Weak-Grid Connection 2003Pardha Saradhi JNo ratings yet
- Exemple - Convertisseurs - ReseauxDocument6 pagesExemple - Convertisseurs - ReseauxyoussefNo ratings yet
- Review of Electric Propulsion For Small BoatsdronesDocument8 pagesReview of Electric Propulsion For Small BoatsdronesSilviu PopaNo ratings yet
- Battery Energy Storage To Mitigate Rapid Voltage/Power Fluctuations in Power Grids Due To Fast Variations of Solar/Wind OutputsDocument12 pagesBattery Energy Storage To Mitigate Rapid Voltage/Power Fluctuations in Power Grids Due To Fast Variations of Solar/Wind OutputsINDUMOHAN SNo ratings yet
- Supervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergyDocument8 pagesSupervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergyMelissa MillerNo ratings yet
- Renewable EnergyDocument9 pagesRenewable EnergyjavierNo ratings yet
- JK Lecture Notes On Electric Power SystemsDocument80 pagesJK Lecture Notes On Electric Power Systemstabibujuha84100% (6)
- Reactive Power Supplied by Wind Energy Converters - Cost-Benefit-AnalysisDocument10 pagesReactive Power Supplied by Wind Energy Converters - Cost-Benefit-AnalysisjandazNo ratings yet
- Harmonic Reduction IEEE PaperDocument6 pagesHarmonic Reduction IEEE PaperRajasekaranViswaNo ratings yet
- Eff'Ects of Small Embedded Generation On Power QualityDocument4 pagesEff'Ects of Small Embedded Generation On Power QualitychethanNo ratings yet
- A Study On Load Frequency ControlDocument10 pagesA Study On Load Frequency ControlSamuel AdamuNo ratings yet
- Large Offshore Wind Farm-Ikni-GreahDocument6 pagesLarge Offshore Wind Farm-Ikni-GreahAhmed Ousmane BAGRE100% (1)
- Micro Wind Power Generator With Battery Energy StorageDocument8 pagesMicro Wind Power Generator With Battery Energy StorageashameensNo ratings yet
- Modelling, Operation and Control of HVDC Connected Oshore Wind FarmsDocument26 pagesModelling, Operation and Control of HVDC Connected Oshore Wind FarmsMohammed Shareef ShaikhNo ratings yet
- Aees P4Document5 pagesAees P4Profil FaksNo ratings yet
- Modeling and Analysis of A DC Electrical System and Controllers For Implementation of A Grid-Interactive BuildingDocument21 pagesModeling and Analysis of A DC Electrical System and Controllers For Implementation of A Grid-Interactive Buildingsurisetti amruthaNo ratings yet
- A Statcom Control Scheme DocumentationDocument65 pagesA Statcom Control Scheme DocumentationSantosh SuryataleNo ratings yet
- Grid Integration of Wind Energy Converters and Wind Field ApplicationsDocument14 pagesGrid Integration of Wind Energy Converters and Wind Field ApplicationselginNo ratings yet
- AC Vs DC Cable Transmission For OffshoreDocument35 pagesAC Vs DC Cable Transmission For Offshoreahammedfk253583% (6)
- Stand-Alone Wind Power System Operating With A Specific Storage StructureDocument6 pagesStand-Alone Wind Power System Operating With A Specific Storage StructureAnbalagan GuruNo ratings yet
- Final ReportDocument31 pagesFinal ReportPRACHI KATARENo ratings yet
- A High-Frequency Link Multilevel Cascade PDFDocument16 pagesA High-Frequency Link Multilevel Cascade PDFtcervera0No ratings yet
- The Beneficial Role of SMES Coil in DC Lines As An Energy Buffer For Integrating Large Scale Wind PowerDocument4 pagesThe Beneficial Role of SMES Coil in DC Lines As An Energy Buffer For Integrating Large Scale Wind PowerFernando Torres LealNo ratings yet
- Chen2009 PDFDocument17 pagesChen2009 PDFKIREETINo ratings yet
- Grid-Connected Wind-PhotovoltaicDocument70 pagesGrid-Connected Wind-PhotovoltaicGreenCornerTech Nlr100% (1)
- Kaliamoorthy2015 PDFDocument10 pagesKaliamoorthy2015 PDFkhalidNo ratings yet
- Márquez J.L., Molina M.G., Pacas J.MDocument6 pagesMárquez J.L., Molina M.G., Pacas J.Mlalita pargaiNo ratings yet
- 2008 Braun EwecDocument10 pages2008 Braun EwecfarzanesunflowerNo ratings yet
- Tec 2009 2025323Document10 pagesTec 2009 2025323Elpidio ragaNo ratings yet
- 03MC0132 Rev. 00Document11 pages03MC0132 Rev. 0089deveshNo ratings yet
- AC and DC Aggregation EffectsDocument8 pagesAC and DC Aggregation EffectsveguruprasadNo ratings yet
- Unu GTP 2009 11Document27 pagesUnu GTP 2009 11Adam IbnuNo ratings yet
- 291 GarciaDocument6 pages291 GarciaRizkiNo ratings yet
- 14pe1 PDFDocument12 pages14pe1 PDFChetan SoniNo ratings yet
- 00707781Document6 pages00707781sandeepbabu28No ratings yet
- Hello HElloDocument8 pagesHello HElloArslan NaveedNo ratings yet
- Harmonic Models of A Back To Back ConverterDocument8 pagesHarmonic Models of A Back To Back ConverterQusai LateefNo ratings yet
- Paper #37CDocument6 pagesPaper #37CDrAdel A. ElbasetNo ratings yet
- Smoothing of Grid-Connected Wind-Diesel Power Output Using Energy Capacitor SystemDocument6 pagesSmoothing of Grid-Connected Wind-Diesel Power Output Using Energy Capacitor SystemDrAdel A. ElbasetNo ratings yet
- Martina Calais Vassilios G. Agelidis: Pcalaism9Cc - Curtin.Edu - Au Vagelidis 9 Curtin. Edu. AuDocument6 pagesMartina Calais Vassilios G. Agelidis: Pcalaism9Cc - Curtin.Edu - Au Vagelidis 9 Curtin. Edu. Auknighthood4allNo ratings yet
- A Study On The Operating Characteristics of SMES For The Dispersed Power Generation SystemDocument4 pagesA Study On The Operating Characteristics of SMES For The Dispersed Power Generation SystemzahidNo ratings yet
- LimpetDocument8 pagesLimpetJoão AlvesNo ratings yet
- Feasibility WT in WIS in Offshore Facilities JS-VFDocument5 pagesFeasibility WT in WIS in Offshore Facilities JS-VFJesus Ernesto SilvaNo ratings yet
- A STATCOM-Control Scheme For Wind Energy System To Improve Power QualityDocument6 pagesA STATCOM-Control Scheme For Wind Energy System To Improve Power QualitySubash JayarajNo ratings yet
- Utilization of Non Conventional Sources of Energy With Power Quality Imrovement MLMS by Janesh PaulDocument13 pagesUtilization of Non Conventional Sources of Energy With Power Quality Imrovement MLMS by Janesh PaulPrince Janesh UniqueNo ratings yet
- AM28 A Single-Phase Photovoltaic Inverter Topology With A Series-Connected Energy BufferDocument9 pagesAM28 A Single-Phase Photovoltaic Inverter Topology With A Series-Connected Energy BufferReddy KvmNo ratings yet
- Challenges of Integrating Large Amounts of WindDocument7 pagesChallenges of Integrating Large Amounts of WindhananwarNo ratings yet
- Power Electronics in Wind Turbine SystemsDocument19 pagesPower Electronics in Wind Turbine SystemsAnas AlzoubiNo ratings yet
- Tyndall Centre Working Paper 32Document20 pagesTyndall Centre Working Paper 32Tyndall Centre for Climate Change ResearchNo ratings yet
- 8 - UPQC-wind Farm PDFDocument8 pages8 - UPQC-wind Farm PDFSri Kavya KomirisettyNo ratings yet
- Sizing of Step-Up Transformers For PV Plants Through A Probabilistic ApproachDocument10 pagesSizing of Step-Up Transformers For PV Plants Through A Probabilistic ApproachAjay ChackoNo ratings yet
- PV PenetrationDocument6 pagesPV PenetrationViraj DissanayakeNo ratings yet
- Facts SathyabamaDocument29 pagesFacts Sathyabamaramya sreeNo ratings yet
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- IT Application Guide Ed4Document134 pagesIT Application Guide Ed4K Vijay Bhaskar ReddyNo ratings yet
- DIgSILENT PowerFactory User Manual 2017 PDFDocument1,213 pagesDIgSILENT PowerFactory User Manual 2017 PDFgausscanaveaNo ratings yet
- SIEMENS - Standards For MV-Switchgear IEC 62271-100 PDFDocument25 pagesSIEMENS - Standards For MV-Switchgear IEC 62271-100 PDFedwinoria100% (3)
- 3.5a Step Down Switching RegulatorDocument17 pages3.5a Step Down Switching RegulatorgausscanaveaNo ratings yet
- Tantalum Surface Mount CapacitorsDocument24 pagesTantalum Surface Mount CapacitorsgausscanaveaNo ratings yet
- Proe CablingDocument18 pagesProe Cablingbiskuitul2788No ratings yet
- Guide To Sheath Bonding Design, in Distribution and Transmission Lines With HV Underground CablesDocument12 pagesGuide To Sheath Bonding Design, in Distribution and Transmission Lines With HV Underground CablesgausscanaveaNo ratings yet
- Transmision and SubstationsDocument159 pagesTransmision and SubstationsgausscanaveaNo ratings yet
- Steel Pipe Design Rev2Document27 pagesSteel Pipe Design Rev2gausscanaveaNo ratings yet
- Reliability and Adequacy Assessment of A Transmission NetworkDocument8 pagesReliability and Adequacy Assessment of A Transmission NetworkgausscanaveaNo ratings yet
- Abb REVIEW Iec 61850 72dpiDocument64 pagesAbb REVIEW Iec 61850 72dpiSérgio Miranda100% (2)
- Welded Steel Pipe American Iron and Steel InstituteDocument80 pagesWelded Steel Pipe American Iron and Steel Institutemaminu1100% (1)
- MDR3-2 Voltage Relay With Evaluation of Symmetrical ComponentsDocument46 pagesMDR3-2 Voltage Relay With Evaluation of Symmetrical ComponentsgausscanaveaNo ratings yet
- Reliability Analysis of 220 KV Power TransformersDocument13 pagesReliability Analysis of 220 KV Power TransformersgausscanaveaNo ratings yet
- Minisonic2000 - DatasheetDocument2 pagesMinisonic2000 - DatasheetgausscanaveaNo ratings yet
- Meliopoulos PSERC T38 SubstationOfTheFuture 2010Document114 pagesMeliopoulos PSERC T38 SubstationOfTheFuture 2010Vamsi PatwariNo ratings yet
- Merging Units - IEC 61850-9-2Document85 pagesMerging Units - IEC 61850-9-2gausscanavea100% (2)
- Circuit BreakersDocument24 pagesCircuit Breakersclide_050793No ratings yet
- Gender and Materialism / Género y MaterialismoDocument30 pagesGender and Materialism / Género y MaterialismogausscanaveaNo ratings yet
- Review of Existing Hydro and PSH ModelsDocument102 pagesReview of Existing Hydro and PSH ModelsgausscanaveaNo ratings yet
- Battery SizingDocument431 pagesBattery SizinggausscanaveaNo ratings yet
- Gender and Materialism / Género y MaterialismoDocument30 pagesGender and Materialism / Género y MaterialismogausscanaveaNo ratings yet
- IEC 60815-1, Aisladores HV, Definiciones PDFDocument30 pagesIEC 60815-1, Aisladores HV, Definiciones PDFarturoncNo ratings yet
- O&M Manual of USBRDocument46 pagesO&M Manual of USBRimadhuryya5023No ratings yet
- Power System Reliability Analysis With Distributed GeneratorsDocument87 pagesPower System Reliability Analysis With Distributed GeneratorsNmg KumarNo ratings yet
- Transformer Fire Protection: Facilities Instructions, Standards, and Techniques Volume 3-32Document43 pagesTransformer Fire Protection: Facilities Instructions, Standards, and Techniques Volume 3-32GualaNo ratings yet
- Electrical Engineering Design CriteriaDocument28 pagesElectrical Engineering Design Criteriapurit83No ratings yet
- Power NetworksDocument40 pagesPower NetworksMuruganNo ratings yet
- Network Protection and Automation Guide - Alstom (Schneider Electric)Document500 pagesNetwork Protection and Automation Guide - Alstom (Schneider Electric)boeingAH6495% (20)
- Buku Murid Bahasa Inggris - Student's Book My Next Word For Elementary School Unit 10 - Fase BDocument8 pagesBuku Murid Bahasa Inggris - Student's Book My Next Word For Elementary School Unit 10 - Fase BKeni KenizaNo ratings yet
- Aljac Sampler: Environmentally Acceptable, Operationally Efficient and Safe, Eliminating Any Product LossDocument3 pagesAljac Sampler: Environmentally Acceptable, Operationally Efficient and Safe, Eliminating Any Product LossT. LimNo ratings yet
- A Very Old MachineDocument20 pagesA Very Old MachineSwathi G. SalemNo ratings yet
- Wire Rope Forensics Letter PDFDocument50 pagesWire Rope Forensics Letter PDFAshley DeanNo ratings yet
- VF (Kyhkkjrh VK Qfozkkulalfkku) - F'KDS"K) MRRJK (K.M& 249201Document3 pagesVF (Kyhkkjrh VK Qfozkkulalfkku) - F'KDS"K) MRRJK (K.M& 249201RajaNo ratings yet
- Proposed Bedroom Enhancement: Jenel C. Tangonan Archi 1A (Stem) Architectural Design Plate No.1Document1 pageProposed Bedroom Enhancement: Jenel C. Tangonan Archi 1A (Stem) Architectural Design Plate No.1Jehan TangonanNo ratings yet
- Davao Region Slogan Reflective EssayDocument4 pagesDavao Region Slogan Reflective EssayDonna Elaine OrdoñezNo ratings yet
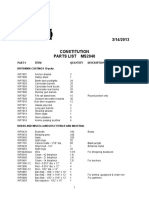
- MS2040 Constitution Parts ListDocument6 pagesMS2040 Constitution Parts ListTemptationNo ratings yet
- Robotics Toolbox 9.6 TutorialDocument149 pagesRobotics Toolbox 9.6 TutorialRogério Lopes100% (1)
- TCNHS - Diagnostic-test-G8-cookery 7&8Document2 pagesTCNHS - Diagnostic-test-G8-cookery 7&8Elna Grace Dicon-Ybañez100% (4)
- 6 Chapter 6 9781786393814Document41 pages6 Chapter 6 9781786393814yunicenjeNo ratings yet
- Nasa ThesisDocument8 pagesNasa Thesisdnr3krf8100% (2)
- Whirlpool Adg 789Document22 pagesWhirlpool Adg 789Laurentiu GramaNo ratings yet
- Type of TrucksDocument8 pagesType of TrucksYojhan VelezNo ratings yet
- Comparative Superlative With Key PDFDocument1 pageComparative Superlative With Key PDFAnonymous 8AHCMsPuNo ratings yet
- UCSP Module 4Document20 pagesUCSP Module 4Agas FamilyNo ratings yet
- Carcass Strength Relationships Conveyor BeltsDocument9 pagesCarcass Strength Relationships Conveyor Beltseduardo_chaban100% (1)
- Aspen Tutorial #4: Design Specs & Sensitivity Analysis: OutlineDocument11 pagesAspen Tutorial #4: Design Specs & Sensitivity Analysis: OutlineWonda 005No ratings yet
- Kingspan 30 GSNDocument1 pageKingspan 30 GSNNoella AguiarNo ratings yet
- People at Virology: Dmitri Iosifovich Ivanovsky - Founders of VirologyDocument2 pagesPeople at Virology: Dmitri Iosifovich Ivanovsky - Founders of VirologyFae BladeNo ratings yet
- Intercont Tersus DatasheetDocument5 pagesIntercont Tersus DatasheetJocemir FerstNo ratings yet
- kAmAxI Muka Panchashati EngDocument25 pageskAmAxI Muka Panchashati EngSrinathvr100% (1)
- Artikel Penelitian Annisa Humairah IbrahimDocument15 pagesArtikel Penelitian Annisa Humairah Ibrahimisma nurhandayaniNo ratings yet
- Symmetry & Space GroupsDocument49 pagesSymmetry & Space GroupsfaysaljamilNo ratings yet
- Tugas Topic 4 Devi PermatasariDocument8 pagesTugas Topic 4 Devi PermatasariMartinaNo ratings yet
- Kids and Their Favourite Food Key Reading Comprehension Exercises - 34436Document2 pagesKids and Their Favourite Food Key Reading Comprehension Exercises - 34436MonicaMartirosyanNo ratings yet
- XVI - Magneticpropertiesofmanganese ContainingsolidsolutionsofbismuthorthoniobateBiNiO4Document7 pagesXVI - Magneticpropertiesofmanganese ContainingsolidsolutionsofbismuthorthoniobateBiNiO4Chukwuebuka UgochukwuNo ratings yet
- Jason Read, "Real Subsumption"Document32 pagesJason Read, "Real Subsumption"Aren Z. AizuraNo ratings yet
- Approved Reading List Editions 2019ff As of 01 19 2023 2Document9 pagesApproved Reading List Editions 2019ff As of 01 19 2023 2nikolNo ratings yet
- Infant of A Diabetic MotherDocument17 pagesInfant of A Diabetic MotherLovina Falendini AndriNo ratings yet