You might also like
- Tan Delta CDF-6000Document2 pagesTan Delta CDF-6000MarcoGiraldoNo ratings yet
- Transformer Design: OUTPUT EQUATION: - It Gives The Relationship Between Electrical Rating and Physical DimensionsDocument15 pagesTransformer Design: OUTPUT EQUATION: - It Gives The Relationship Between Electrical Rating and Physical Dimensionsheruye mulugetaNo ratings yet
- NFPA 70B 2023 - New Guidelines For Electric InspectionsDocument2 pagesNFPA 70B 2023 - New Guidelines For Electric InspectionsAM KANo ratings yet
- Electrical Safety - EEE1021 Experiment - 6: Line Charging Current in AC More Over Poses Serious Problems in CablesDocument5 pagesElectrical Safety - EEE1021 Experiment - 6: Line Charging Current in AC More Over Poses Serious Problems in CablesRobert JrNo ratings yet
- Damping of Inrush Current in Low Voltage PFC EquipmentDocument12 pagesDamping of Inrush Current in Low Voltage PFC EquipmentkgskgmNo ratings yet
- Cta Omicron Vs PCT PonovoDocument1 pageCta Omicron Vs PCT PonovoNicolás HuenufilNo ratings yet
- REF Fuse Application GuideDocument17 pagesREF Fuse Application GuidemuskanumeedNo ratings yet
- AFL Substation Bus DampersDocument12 pagesAFL Substation Bus Dampersabhi120783No ratings yet
- 10 4 Ffab: Calculate Here If The Primary Input Current Is Unknown. Select Primary Wire Gauge For 200A/Sq - CM PG 336Document8 pages10 4 Ffab: Calculate Here If The Primary Input Current Is Unknown. Select Primary Wire Gauge For 200A/Sq - CM PG 336Geovany Mena VillagraNo ratings yet
- Introduction of Electric Power SystemDocument17 pagesIntroduction of Electric Power SystemsohaibNo ratings yet
- Partial DischargeDocument11 pagesPartial DischargeDavid_Allen_007100% (1)
- Furnace & Rectifier TransformersDocument3 pagesFurnace & Rectifier Transformersjoydeep_d3232No ratings yet
- Atvus PRVDocument6 pagesAtvus PRVvipulpanchotiyaNo ratings yet
- Temperature Rise HV MotorDocument11 pagesTemperature Rise HV Motorashwani2101No ratings yet
- Fundamental, Technology and Manufacturing in Indonesia: HV Power TransformerDocument82 pagesFundamental, Technology and Manufacturing in Indonesia: HV Power TransformerAriNo ratings yet
- Transformer PD OnlineDocument12 pagesTransformer PD Onlinesumpeno enoNo ratings yet
- As 1883-1992 Guide To Maintenance and Supervision of Insulating Oils in ServiceDocument8 pagesAs 1883-1992 Guide To Maintenance and Supervision of Insulating Oils in ServiceSAI Global - APACNo ratings yet
- Research On On-Line DGA Using FTIRDocument6 pagesResearch On On-Line DGA Using FTIRJames McVeighNo ratings yet
- Percentage ImpedanceDocument2 pagesPercentage ImpedanceMahendra Pratap SinghNo ratings yet
- Insulation Resistance+.Polarization IndexDocument6 pagesInsulation Resistance+.Polarization IndexflegiasNo ratings yet
- Transport X User Manual V2.0 EnglishDocument76 pagesTransport X User Manual V2.0 Englishsabalito81No ratings yet
- Presentation DielectricDocument25 pagesPresentation Dielectricjose mirandaNo ratings yet
- Vector Group Test of TransformerDocument4 pagesVector Group Test of TransformerHamayoun Murtaza100% (2)
- ECT158 - Calculation of Short-CircuitDocument35 pagesECT158 - Calculation of Short-Circuitkokonut1128No ratings yet
- STATCOMDocument7 pagesSTATCOMALPHONCENo ratings yet
- As 1028-1992 Power Reactors and Earthing TransformersDocument8 pagesAs 1028-1992 Power Reactors and Earthing TransformersSAI Global - APACNo ratings yet
- Hygk307 ManualDocument16 pagesHygk307 Manualkenlavie1No ratings yet
- 1500kVA-3 Phase LSA 50.2 L8 - 440V - 60HzDocument2 pages1500kVA-3 Phase LSA 50.2 L8 - 440V - 60HzsupermannonNo ratings yet
- DRTS 64Document8 pagesDRTS 64RAJESH KUMARNo ratings yet
- Telenor BDVDocument15 pagesTelenor BDVShahid IqbalNo ratings yet
- Amorphous Metal TransformersDocument17 pagesAmorphous Metal TransformersAnjeri PhelestusNo ratings yet
- Basics of Motor Starting StudyDocument18 pagesBasics of Motor Starting StudyJerome EugeneNo ratings yet
- Impedance Correction FactorDocument7 pagesImpedance Correction FactorEngr Fahimuddin QureshiNo ratings yet
- Wye-Wye Transformers & Tertiary WindingsDocument5 pagesWye-Wye Transformers & Tertiary WindingssasahitoNo ratings yet
- Vacuum Bottle Breaker Application and Testing GuideDocument6 pagesVacuum Bottle Breaker Application and Testing GuidefernandoquecaNo ratings yet
- BS en 50180-1-2015Document44 pagesBS en 50180-1-2015Rylai CrestfallNo ratings yet
- FEM Based No-Load Loss Calculation of Triangular W Ound Core TransformerDocument4 pagesFEM Based No-Load Loss Calculation of Triangular W Ound Core TransformerVictor Julián Fernández CarrazanaNo ratings yet
- SF - An Excellent Insulating and Quenching Gas: Substantial Properties at A GlanceDocument16 pagesSF - An Excellent Insulating and Quenching Gas: Substantial Properties at A GlancedennyyusufNo ratings yet
- IEEE Standard Performance Characteristics and Dimensions For Outdoor Apparatus BushingsDocument11 pagesIEEE Standard Performance Characteristics and Dimensions For Outdoor Apparatus BushingsSetia SianiparNo ratings yet
- Electrical Performance Testing of AC MotorsDocument3 pagesElectrical Performance Testing of AC Motorsnguyen_huu_duy_hcmNo ratings yet
- The Dielectric Discharge Test: Figure 1. Insulation Test Currents During ChargingDocument4 pagesThe Dielectric Discharge Test: Figure 1. Insulation Test Currents During Chargingpatelsuhas21No ratings yet
- Rapid Pressure Rise RelaysDocument4 pagesRapid Pressure Rise RelaysANGEL STRAGLIATINo ratings yet
- Simplified Short-Circuit CalculationsDocument18 pagesSimplified Short-Circuit CalculationsWallie BillingsleyNo ratings yet
- 7SS522 CT RequirementDocument4 pages7SS522 CT RequirementAnonymous 9EV0OmkNo ratings yet
- Insulation Resistance TestingDocument3 pagesInsulation Resistance TestingThe MatrixNo ratings yet
- Inductance Leakage CalculationDocument6 pagesInductance Leakage Calculationnuswanggono1994No ratings yet
- 7pg21 Solkor R RF Catalogue SheetDocument26 pages7pg21 Solkor R RF Catalogue SheetsmcraftNo ratings yet
- IEEE 519 TablesDocument1 pageIEEE 519 TablesTudorache IulianNo ratings yet
- Insulation Dielectric Test of TransformerDocument2 pagesInsulation Dielectric Test of TransformerMukhtiar HussainNo ratings yet
- Thermal Analysis of Electrical Machines Limits and Heat Transfer PrinciplesDocument2 pagesThermal Analysis of Electrical Machines Limits and Heat Transfer PrinciplesAnonymous sAmJfcVNo ratings yet
- Grounding & Ground Fault Protection of Multiple Generator InstallationsDocument22 pagesGrounding & Ground Fault Protection of Multiple Generator InstallationssparkCE100% (1)
- Circulating CurrentDocument6 pagesCirculating CurrentjogiyajeeNo ratings yet
- Tracking in InsulatorsDocument6 pagesTracking in InsulatorsGaurav kumarNo ratings yet
- MATLAB & PSIM Based Analysis of Three-Phase Induction Motor Operation With Unbalanced Supply SystemDocument6 pagesMATLAB & PSIM Based Analysis of Three-Phase Induction Motor Operation With Unbalanced Supply SystemHeli ShahNo ratings yet
- Blocked Rotor TestDocument11 pagesBlocked Rotor TestIjabi100% (1)
- Electrical Fault Detection in Three Phase Squirrel Cage Induction Motor by Vibration Analysis Using MEMS Accelerometer.Document6 pagesElectrical Fault Detection in Three Phase Squirrel Cage Induction Motor by Vibration Analysis Using MEMS Accelerometer.Jose Luis Hernandez CoronaNo ratings yet
- Motors Voltage UnbalanceDocument8 pagesMotors Voltage Unbalancechilamkurti_sivasankararaoNo ratings yet
- Lightning SPDDocument73 pagesLightning SPDnoonbcc130No ratings yet
- Residual Solar Photovotaic SystemDocument1 pageResidual Solar Photovotaic Systemnoonbcc130No ratings yet
- Testing and Evaluation of Grounding Systems PDFDocument46 pagesTesting and Evaluation of Grounding Systems PDFOmar Ramirez PrietoNo ratings yet
- KNX Basics en PDFDocument51 pagesKNX Basics en PDFnoonbcc130No ratings yet
- KNX Basics en PDFDocument51 pagesKNX Basics en PDFnoonbcc130No ratings yet
- Off-Grid PV SystemDocument42 pagesOff-Grid PV Systemnoonbcc130No ratings yet
- FAQs Grid Connected Solar Rooftop SystemsDocument16 pagesFAQs Grid Connected Solar Rooftop Systemslakshmi0304No ratings yet
- IEC StandardsDocument45 pagesIEC StandardsTen Apolinario50% (2)
- 32 Bfe 51120 e 8 FDD 822Document0 pages32 Bfe 51120 e 8 FDD 822vinodlifeNo ratings yet
- Iec BS en 62305 1 - 4Document18 pagesIec BS en 62305 1 - 4Andrei Martinas100% (1)
- Iec BS en 62305 1 - 4Document18 pagesIec BS en 62305 1 - 4Andrei Martinas100% (1)
- ECT083Document22 pagesECT083Dheeraj YadavNo ratings yet
- 32 Bfe 51120 e 8 FDD 822Document0 pages32 Bfe 51120 e 8 FDD 822vinodlifeNo ratings yet
- Power Grids-Microgrids PDFDocument10 pagesPower Grids-Microgrids PDFnoonbcc130No ratings yet
- B.vansickle - NFPA 780-08Document23 pagesB.vansickle - NFPA 780-08mrobayoyhwh100% (1)
- Active Energy Efficiency SavingsDocument21 pagesActive Energy Efficiency Savingsengnajeeb75No ratings yet
- Calculus PDFDocument17 pagesCalculus PDFnoonbcc130No ratings yet
- รัฐธรรมนูญDocument365 pagesรัฐธรรมนูญnoonbcc130No ratings yet
- Evaluation of Rolling Sphere Method PDFDocument20 pagesEvaluation of Rolling Sphere Method PDFsorry2qazNo ratings yet
- Fire NotTheLastDocument3 pagesFire NotTheLastnoonbcc130No ratings yet
- Humanizing CalculusDocument5 pagesHumanizing Calculusnoonbcc130No ratings yet
- Celdas ElectromagneticasDocument14 pagesCeldas ElectromagneticasBryanLuzónNo ratings yet
- Current Transformers 03-06Document12 pagesCurrent Transformers 03-06noonbcc130No ratings yet
- Conduit Installation Guide by Sti PDFDocument34 pagesConduit Installation Guide by Sti PDFVishnu M S0% (1)
- GlossaryDocument2 pagesGlossarynoonbcc130No ratings yet
- 2005 16 Autumn Wiring Matters Earthing Your Questions AnsweredDocument7 pages2005 16 Autumn Wiring Matters Earthing Your Questions AnsweredAbhijeet KulkarniNo ratings yet
- AQX Users GuideDocument55 pagesAQX Users Guidenoonbcc130No ratings yet
- Airport Facility and Operations HandbookDocument50 pagesAirport Facility and Operations Handbooknoonbcc130100% (1)
- AWG 2 SQMM - 01Document2 pagesAWG 2 SQMM - 01noonbcc130No ratings yet
- Momentum Worksheet2 2Document3 pagesMomentum Worksheet2 2trical27 tricalNo ratings yet
- Ficha Tecnica Inversor Sg8k3 S SungrowDocument2 pagesFicha Tecnica Inversor Sg8k3 S SungrowMauro Mendes de MelloNo ratings yet
- Chapter 13 - Electrical PropertiesDocument18 pagesChapter 13 - Electrical PropertiesThành Phương Tấn100% (1)
- Mathcad - Duopitch Roof Wind Design LoadsDocument13 pagesMathcad - Duopitch Roof Wind Design LoadsValentin100% (1)
- Ebook Electric Circuits 10Th Edition Nilsson Solutions Manual Full Chapter PDFDocument68 pagesEbook Electric Circuits 10Th Edition Nilsson Solutions Manual Full Chapter PDFalexandercampbelldkcnzafgtw100% (10)
- Chapter 16 Compressible Flow: 16.1 Speed of SoundDocument42 pagesChapter 16 Compressible Flow: 16.1 Speed of SoundrenebbNo ratings yet
- Motion in Two DimensionsDocument43 pagesMotion in Two DimensionsJessiee YeoNo ratings yet
- Huawei New Generation Telecom Power Solution MTS9000ADocument11 pagesHuawei New Generation Telecom Power Solution MTS9000Atiennv26No ratings yet
- Impact of The HP Preheater Bypass On The Economizer Inlet HeaderDocument5 pagesImpact of The HP Preheater Bypass On The Economizer Inlet HeaderMadhulika SrinivasNo ratings yet
- E by M Thomson MethodDocument9 pagesE by M Thomson MethodReddyvari Venugopal33% (3)
- HIPOTDocument5 pagesHIPOTHARIHARANNo ratings yet
- Assignment 1 - Fluid StaticsDocument3 pagesAssignment 1 - Fluid StaticsaarijNo ratings yet
- AssignmentDocument9 pagesAssignmentrslunaNo ratings yet
- Gas Engine DataDocument10 pagesGas Engine Datarendy simanjuntakNo ratings yet
- Position, Displacement, and Proximity SensorsDocument27 pagesPosition, Displacement, and Proximity SensorsNyandaMadili MalashiNo ratings yet
- PSU-DC-31 and PSU-AC-31 Unit DescriptionDocument12 pagesPSU-DC-31 and PSU-AC-31 Unit DescriptionHuỳnh Tấn LợiNo ratings yet
- Gyroscopic Forces Modeled in AnsysDocument92 pagesGyroscopic Forces Modeled in AnsysGiuseppe Failla100% (1)
- TLE 9 - 3Q - Electrical PlansDocument23 pagesTLE 9 - 3Q - Electrical Plansjayson cajateNo ratings yet
- Pelton Turbine: Experiment - 5Document8 pagesPelton Turbine: Experiment - 5gebremariam birkieNo ratings yet
- Physics Lab 2Document4 pagesPhysics Lab 2Gregory GouldNo ratings yet
- Temperature: By: S K MondalDocument4 pagesTemperature: By: S K Mondalhirenpatel_universalNo ratings yet
- Answers To Exercises 2014Document7 pagesAnswers To Exercises 2014Ana María Muñoz JaramilloNo ratings yet
- 3EK8 Medium-Voltage Surge Arresters: Catalog Hp-Ar 28.1 2018Document12 pages3EK8 Medium-Voltage Surge Arresters: Catalog Hp-Ar 28.1 2018J. Harold Calvo M.No ratings yet
- Ca HD4-R (En) H 1VCP000028-1602Document64 pagesCa HD4-R (En) H 1VCP000028-1602LEANDRONo ratings yet
- Gain, Attenuation, and DecibelsDocument10 pagesGain, Attenuation, and DecibelsValentina NietoNo ratings yet
- Lab Report 5Document9 pagesLab Report 5Kazi Ershadul IslamNo ratings yet
- IED-Review Engineering Formula SheetDocument10 pagesIED-Review Engineering Formula Sheetedhy_03100% (1)
- Prepaid Energy Meter Block DiagramDocument5 pagesPrepaid Energy Meter Block DiagramchawlamiteshNo ratings yet
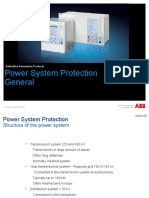
- Power System Protection General: Substation Automation ProductsDocument48 pagesPower System Protection General: Substation Automation ProductsRobert MihayoNo ratings yet
- Lec 1Document31 pagesLec 1Ibrahim HasanNo ratings yet
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 4.5 out of 5 stars4.5/5 (9)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosFrom EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosRating: 5 out of 5 stars5/5 (1)
- Analog Design and Simulation Using OrCAD Capture and PSpiceFrom EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceNo ratings yet
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonFrom EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonRating: 5 out of 5 stars5/5 (2)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- Wearable Sensors: Fundamentals, Implementation and ApplicationsFrom EverandWearable Sensors: Fundamentals, Implementation and ApplicationsEdward SazonovNo ratings yet
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)