You might also like
- Book of ProtectionDocument69 pagesBook of ProtectiontrungdaongoNo ratings yet
- Brittney Gilliam, Et Al., v. City of Aurora, Et Al.Document42 pagesBrittney Gilliam, Et Al., v. City of Aurora, Et Al.Michael_Roberts2019No ratings yet
- The Way To Sell: Powered byDocument25 pagesThe Way To Sell: Powered bysagarsononiNo ratings yet
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsFrom EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo ratings yet
- Rayleigh Damping PDFDocument9 pagesRayleigh Damping PDFmattilandNo ratings yet
- 053 - CE8021, CE6701 Structural Dynamics and Earthquake Engineering - 2 Marks 2Document116 pages053 - CE8021, CE6701 Structural Dynamics and Earthquake Engineering - 2 Marks 2Ankit Jose Antony0% (1)
- Types of Response and VibrationsDocument40 pagesTypes of Response and VibrationsGaluh Ayu PNo ratings yet
- Design of Columns, BeamsDocument7 pagesDesign of Columns, BeamsAbdulaashik AbdulkareemNo ratings yet
- Internal Credit Risk Rating Model by Badar-E-MunirDocument53 pagesInternal Credit Risk Rating Model by Badar-E-Munirsimone333No ratings yet
- Integrating GrammarDocument8 pagesIntegrating GrammarMaría Perez CastañoNo ratings yet
- Dampers For Earthquake Vibration Control: Dr. Imad H. Mualla DAMPTECH Co., Ltd. DenmarkDocument16 pagesDampers For Earthquake Vibration Control: Dr. Imad H. Mualla DAMPTECH Co., Ltd. Denmarkmuhammed mundhir100% (1)
- Q2 SHS Intro To World Religion - Module 2Document19 pagesQ2 SHS Intro To World Religion - Module 2jan roiNo ratings yet
- Analyzing Evidence of College Readiness: A Tri-Level Empirical & Conceptual FrameworkDocument66 pagesAnalyzing Evidence of College Readiness: A Tri-Level Empirical & Conceptual FrameworkJinky RegonayNo ratings yet
- Detailed Lesson Plan in Science 10Document7 pagesDetailed Lesson Plan in Science 10Glen MillarNo ratings yet
- Newmark IntegrationDocument12 pagesNewmark IntegrationOvidiu GenteanuNo ratings yet
- Statistics Machine Learning Python DraftDocument319 pagesStatistics Machine Learning Python DraftnagNo ratings yet
- Ashforth & Mael 1989 Social Identity Theory and The OrganizationDocument21 pagesAshforth & Mael 1989 Social Identity Theory and The Organizationhoorie100% (1)
- Modal Design in Structural DynamicsDocument8 pagesModal Design in Structural Dynamicspanos2244662864No ratings yet
- Structural Dynamics Response ForcesDocument4 pagesStructural Dynamics Response ForcesMD NayeemNo ratings yet
- Example 3Document8 pagesExample 3AlexanderNCNo ratings yet
- Deflection by Energy MethodsDocument10 pagesDeflection by Energy MethodsMfonobong John EkottNo ratings yet
- CEE 541. Structural Dynamics: Fall 2014Document4 pagesCEE 541. Structural Dynamics: Fall 2014praveennagarajanNo ratings yet
- Buckling ExamplesDocument5 pagesBuckling ExamplesSrivatsan SampathNo ratings yet
- Review On Analysis and Design of RCC Cooling Tower Using STAAD-ProDocument7 pagesReview On Analysis and Design of RCC Cooling Tower Using STAAD-ProIJRASETPublicationsNo ratings yet
- Finite Element Method Axially Loaded RodsDocument22 pagesFinite Element Method Axially Loaded RodshalimsevimNo ratings yet
- Vibration Assignment 2Document2 pagesVibration Assignment 2Vivek V ShetNo ratings yet
- Viscoelastic hereditary integralsDocument12 pagesViscoelastic hereditary integralsletter_ashish4444No ratings yet
- FEM Exam With SolutionDocument8 pagesFEM Exam With SolutionArifian Agusta100% (2)
- Advance Mechanics Problem Set 1Document1 pageAdvance Mechanics Problem Set 1Narsiram Gurjar AwanaNo ratings yet
- Computers and Structures: Hamdolah Behnam, J.S. Kuang, Bijan SamaliDocument17 pagesComputers and Structures: Hamdolah Behnam, J.S. Kuang, Bijan SamaliSayna KellenyNo ratings yet
- 6 - Engesser's Theorem and Truss Deflections by Virtual Work PrinciplesDocument14 pages6 - Engesser's Theorem and Truss Deflections by Virtual Work PrinciplesFrans Alen SarmientoNo ratings yet
- Haufe GISSMODocument48 pagesHaufe GISSMOGoncharik DmitryNo ratings yet
- 3CL1201 Finite Element Method For Structural EngineeringDocument38 pages3CL1201 Finite Element Method For Structural EngineeringKaran PatelNo ratings yet
- Failure theories-IITMDocument5 pagesFailure theories-IITMsunil_patil_38No ratings yet
- Lecture 7: Special Probability Distributions - 2: Assist. Prof. Dr. Emel YAVUZ DUMANDocument34 pagesLecture 7: Special Probability Distributions - 2: Assist. Prof. Dr. Emel YAVUZ DUMANhareshNo ratings yet
- Theory of Elasticity: Exam Problems and Answers Lecture CT5141 (Previously B16)Document96 pagesTheory of Elasticity: Exam Problems and Answers Lecture CT5141 (Previously B16)Ashebir AsratNo ratings yet
- Solution Manual For Introduction To Finite Elements in Engineering 4 Edition Tirupathi R Chandrupatla Ashok D Belegundu Sample PDFDocument8 pagesSolution Manual For Introduction To Finite Elements in Engineering 4 Edition Tirupathi R Chandrupatla Ashok D Belegundu Sample PDFJosua MartinezNo ratings yet
- Introduction To Seismic Essentials in GroningenDocument14 pagesIntroduction To Seismic Essentials in GroningenKay Chan SothearaNo ratings yet
- Unit 4 Symmetrical FaultsDocument18 pagesUnit 4 Symmetrical FaultsjayababNo ratings yet
- Earthquake Analysis of Linear SystemsDocument67 pagesEarthquake Analysis of Linear SystemsPrantik Adhar Samanta67% (3)
- Homework 2Document7 pagesHomework 2Chinny LyheangNo ratings yet
- Aero 6sem ESADocument103 pagesAero 6sem ESAram rakNo ratings yet
- Finite Element Method Beam AnalysisDocument4 pagesFinite Element Method Beam Analysisamalendu_biswas_1No ratings yet
- Frame Analysis: Determine Natural Periods and Design Base Shear ForcesDocument6 pagesFrame Analysis: Determine Natural Periods and Design Base Shear Forcesnial69100% (1)
- Chapter-4 Deflection and StiffnessDocument48 pagesChapter-4 Deflection and StiffnessDhineshkumar MuruganNo ratings yet
- Finite Difference Buckling Analysis of Non Uniform ColumnsDocument8 pagesFinite Difference Buckling Analysis of Non Uniform ColumnsJules NanaNo ratings yet
- ME Structures Theory Elasticity PlasticityDocument3 pagesME Structures Theory Elasticity PlasticityameykatdareNo ratings yet
- DRAFT Materials 07apr2012Document1,067 pagesDRAFT Materials 07apr2012Deepto BanerjeeNo ratings yet
- Earthquake Analysis of StructuresDocument42 pagesEarthquake Analysis of StructuresManmatha KrishnanNo ratings yet
- Brief Introduction To Continuum Mechanics (Deviatoric Stress and Strain)Document33 pagesBrief Introduction To Continuum Mechanics (Deviatoric Stress and Strain)masoodkamalNo ratings yet
- 9Document20 pages9api-3696315100% (1)
- Shear, Bond, Anchorage, Development Length and Torsion: Version 2 CE IIT, KharagpurDocument19 pagesShear, Bond, Anchorage, Development Length and Torsion: Version 2 CE IIT, Kharagpurapi-3696315No ratings yet
- Cdnj04820enc 001Document362 pagesCdnj04820enc 001Oscar CcamaNo ratings yet
- Structural Dynamics Mini Project Report on Tuned Mass DampersDocument4 pagesStructural Dynamics Mini Project Report on Tuned Mass DampersAndre HalimNo ratings yet
- MTech Semester I Exam Questions on Elasticity and PlasticityDocument2 pagesMTech Semester I Exam Questions on Elasticity and PlasticityNaren GujjarNo ratings yet
- Hasofer and Lind MethodDocument15 pagesHasofer and Lind MethodLemtek11No ratings yet
- Dynamic Analysis and Response of Linear SystemsDocument72 pagesDynamic Analysis and Response of Linear SystemsAhmet TükenNo ratings yet
- Numerical 1Document6 pagesNumerical 1Edy MarinNo ratings yet
- Response of SDOF systems to nonperiodic excitationDocument40 pagesResponse of SDOF systems to nonperiodic excitationbjw309100% (1)
- Sidesway Web Buckling of Steel BeamsDocument12 pagesSidesway Web Buckling of Steel BeamsYuth Yuthdanai100% (1)
- Theories of Elastic FailureDocument6 pagesTheories of Elastic FailurePrithvi ChilukuriNo ratings yet
- 1 Logarthmic - DecrementDocument5 pages1 Logarthmic - DecrementAnup PatilNo ratings yet
- Member resistance under combined bi-axial bending and axial compressionDocument12 pagesMember resistance under combined bi-axial bending and axial compressionrd radenNo ratings yet
- Ib RCC StructuresDocument12 pagesIb RCC StructuresRaj BakhtaniNo ratings yet
- PDF Dynamic Analysis of StructuresDocument43 pagesPDF Dynamic Analysis of StructuresChegue BureNo ratings yet
- 5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionDocument8 pages5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionHaridev MoorthyNo ratings yet
- Of Freedom. For Example A Simple Pendulum Consisting of An Inextensible String That IsDocument37 pagesOf Freedom. For Example A Simple Pendulum Consisting of An Inextensible String That IsLucia Antonius100% (1)
- Damped OscillationsDocument5 pagesDamped OscillationsBokstarwel nongsiejNo ratings yet
- p461 PDFDocument20 pagesp461 PDFHemant SinghNo ratings yet
- Radiation Damping: R.P. WalkerDocument20 pagesRadiation Damping: R.P. WalkerKhurram KirmaniNo ratings yet
- Truss Rod AdjustmentDocument2 pagesTruss Rod Adjustmentfarhang_tNo ratings yet
- Assignment 1Document3 pagesAssignment 1farhang_tNo ratings yet
- InformationDC 9394 1Document2 pagesInformationDC 9394 1farhang_tNo ratings yet
- Displacement-Based Seismic Design of BridgesDocument1 pageDisplacement-Based Seismic Design of Bridgesfarhang_tNo ratings yet
- Assignment 3Document3 pagesAssignment 3farhang_tNo ratings yet
- Assignment 2Document3 pagesAssignment 2farhang_tNo ratings yet
- Calculation Sheet: Subject: ReferencesDocument4 pagesCalculation Sheet: Subject: Referencesashkan_ejNo ratings yet
- Effect of Urm Infills On SeismicDocument10 pagesEffect of Urm Infills On Seismicmdkml2No ratings yet
- Study The Reinforced Concrete Frame With Brick Masonry Infill Due To Lateral LoadsDocument6 pagesStudy The Reinforced Concrete Frame With Brick Masonry Infill Due To Lateral LoadsChidanand BhimannavarNo ratings yet
- Study The Reinforced Concrete Frame With Brick Masonry Infill Due To Lateral LoadsDocument6 pagesStudy The Reinforced Concrete Frame With Brick Masonry Infill Due To Lateral LoadsChidanand BhimannavarNo ratings yet
- Miranda V AgDocument3 pagesMiranda V AgCARLO JOSE BACTOLNo ratings yet
- Para Kay BDocument1 pagePara Kay BFeLy DipOn63% (8)
- Unit 4 Trade Discounts Cash Discounts MarkupDocument42 pagesUnit 4 Trade Discounts Cash Discounts MarkupChimwemwe MaoleNo ratings yet
- Debate Pro AbortionDocument5 pagesDebate Pro AbortionFirman Dwi CahyoNo ratings yet
- Productivity in Indian Sugar IndustryDocument17 pagesProductivity in Indian Sugar Industryshahil_4uNo ratings yet
- Jason A Brown: 1374 Cabin Creek Drive, Nicholson, GA 30565Document3 pagesJason A Brown: 1374 Cabin Creek Drive, Nicholson, GA 30565Jason BrownNo ratings yet
- Course Outline Physics EducationDocument3 pagesCourse Outline Physics EducationTrisna HawuNo ratings yet
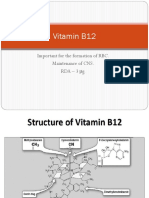
- Vitamin B12: Essential for RBC Formation and CNS MaintenanceDocument19 pagesVitamin B12: Essential for RBC Formation and CNS MaintenanceHari PrasathNo ratings yet
- CV Jan 2015 SDocument4 pagesCV Jan 2015 Sapi-276142935No ratings yet
- Khin Thandar Myint EMPADocument101 pagesKhin Thandar Myint EMPAAshin NandavamsaNo ratings yet
- Lesson 5 Capital BudgetingDocument18 pagesLesson 5 Capital BudgetingklipordNo ratings yet
- Duah'sDocument3 pagesDuah'sZareefNo ratings yet
- Unit 11 LeadershipDocument4 pagesUnit 11 LeadershipMarijana DragašNo ratings yet
- United States v. Christopher King, 724 F.2d 253, 1st Cir. (1984)Document9 pagesUnited States v. Christopher King, 724 F.2d 253, 1st Cir. (1984)Scribd Government DocsNo ratings yet
- Econometrics IntroductionDocument41 pagesEconometrics IntroductionRay Vega LugoNo ratings yet
- Lesson 6. TNCTDocument32 pagesLesson 6. TNCTEsther EdaniolNo ratings yet
- Letter of Reccommendation For LuisaDocument3 pagesLetter of Reccommendation For Luisaapi-243184335No ratings yet
- Emotion and Decision Making: FurtherDocument28 pagesEmotion and Decision Making: FurtherUMAMA UZAIR MIRZANo ratings yet
- 1 CH - 7 - WKSHTDocument8 pages1 CH - 7 - WKSHTJohnNo ratings yet
- Araminta Spook My Haunted House ExtractDocument14 pagesAraminta Spook My Haunted House Extractsenuthmi dihansaNo ratings yet