You might also like
- Kom Unit IIIDocument20 pagesKom Unit IIIRamanathan DuraiNo ratings yet
- Cam Jump Phenomenon-1Document10 pagesCam Jump Phenomenon-1Dhairyasheel Bhutkar100% (1)
- Sizing of CamsDocument1 pageSizing of CamsvijayakumarNo ratings yet
- Chapter 6Document66 pagesChapter 6Arkew Bogale50% (2)
- Upto 2010 KomDocument36 pagesUpto 2010 KomRajueswarNo ratings yet
- Automotive Transmission - Lecture Notes CompleteDocument156 pagesAutomotive Transmission - Lecture Notes CompleteAkshay PundeNo ratings yet
- Cam Experimental Lab: ObjectiveDocument8 pagesCam Experimental Lab: ObjectiveMuhammad Changez Khan100% (2)
- 08 CH-6, Fluid Motion Within Combustion ChamberDocument24 pages08 CH-6, Fluid Motion Within Combustion ChamberAhsan AliNo ratings yet
- Report On Four Bar Mechanism of Sewing MachineDocument8 pagesReport On Four Bar Mechanism of Sewing MachineshazedislamNo ratings yet
- KOM ProjectDocument15 pagesKOM ProjectArvene Binmer JesaryNo ratings yet
- Module 3 - Ideal Models of Engine CyclesDocument37 pagesModule 3 - Ideal Models of Engine CyclesMuhammad BilalNo ratings yet
- Design and Analysis of Disc Brake and Caliper of Four WheelerDocument5 pagesDesign and Analysis of Disc Brake and Caliper of Four WheelerIJSTENo ratings yet
- 9A14402 Theory of MachinesDocument8 pages9A14402 Theory of MachinessivabharathamurthyNo ratings yet
- Cam and Follower: Omar Ahmad Ali Ayman Mohammad Alkhwiter Eid Sunhat AlharbiDocument17 pagesCam and Follower: Omar Ahmad Ali Ayman Mohammad Alkhwiter Eid Sunhat AlharbiOmar AhmedNo ratings yet
- AC Series MotorsDocument8 pagesAC Series Motorsゞ『HaiDerツ98〆No ratings yet
- Gyroscopic CoupleDocument10 pagesGyroscopic CoupleAnandha RamanNo ratings yet
- Machine Element II: Institute of TechnologyDocument39 pagesMachine Element II: Institute of TechnologyAbiy Aliye100% (1)
- Mechanics of Machinery 2 - Balancing of Rotating MassesDocument11 pagesMechanics of Machinery 2 - Balancing of Rotating MassesAhmed Zawad ShovonNo ratings yet
- Unit 4 Balancingofrotatingmasses 131127012048 Phpapp01Document53 pagesUnit 4 Balancingofrotatingmasses 131127012048 Phpapp01adarsh pushpan100% (1)
- Acceleration in Slider Crank MechanismDocument8 pagesAcceleration in Slider Crank MechanismSalah benhsNo ratings yet
- Introduction To R.T.P.P: 1.1 GeneralDocument12 pagesIntroduction To R.T.P.P: 1.1 GeneralSairam Kumar ChowdaryNo ratings yet
- Emission TestsDocument30 pagesEmission TestsBoobalakrishnan A R MoorthyNo ratings yet
- Automobile Differential Unit FinalDocument25 pagesAutomobile Differential Unit FinalSyed Zain100% (1)
- Types of FitsDocument14 pagesTypes of FitsSaurabh SharmaNo ratings yet
- Chapter 7 - FEMDocument34 pagesChapter 7 - FEMpaivensolidsnake100% (1)
- ClutchesDocument12 pagesClutchesAbebaw AyeleNo ratings yet
- Seminar On Supercharger: BY Manhar 15AE60R18Document19 pagesSeminar On Supercharger: BY Manhar 15AE60R18Hatinderpal SinghNo ratings yet
- Me6503 Dme Unit 5 Study Notes 2015Document25 pagesMe6503 Dme Unit 5 Study Notes 2015Bala MuruganNo ratings yet
- Theory of MachinesDocument18 pagesTheory of MachinesVishal PawarNo ratings yet
- AT6501 (R-13) Notes PDFDocument131 pagesAT6501 (R-13) Notes PDFAashiq NawinNo ratings yet
- Design and Analysis of Single Plate ClutchDocument3 pagesDesign and Analysis of Single Plate ClutchChandra Sekar100% (1)
- ClutchesDocument17 pagesClutchesRanjit RajendranNo ratings yet
- Metrology Viva QuestionsDocument2 pagesMetrology Viva QuestionssrajubasavaNo ratings yet
- Steering Geometry and Caster Measurement PDFDocument18 pagesSteering Geometry and Caster Measurement PDFVinayChikNo ratings yet
- Assignment 2 Fluctuating LoadDocument3 pagesAssignment 2 Fluctuating Loadabhishek chaurasiyaNo ratings yet
- Cone ClutchDocument5 pagesCone ClutchDinesh Chahal100% (1)
- Basic Principles of Turbo MachinesDocument6 pagesBasic Principles of Turbo Machinesbinho58100% (1)
- Lab 1 (Full)Document22 pagesLab 1 (Full)Anonymous 8UOCBqiNo ratings yet
- Ray Diagram Kinematic LayoutDocument4 pagesRay Diagram Kinematic Layoutvijayakumar0% (1)
- Lecture06 - Multicylinder EnginesDocument55 pagesLecture06 - Multicylinder Engines蒲俊雄No ratings yet
- OpenFOAMUserGuide A4Document241 pagesOpenFOAMUserGuide A4Marco dos Santos BernardesNo ratings yet
- Experiment No - 1: AIM: Study of Various Types of Gear Boxes Such As Industrial Gear Box, SynchromeshDocument3 pagesExperiment No - 1: AIM: Study of Various Types of Gear Boxes Such As Industrial Gear Box, SynchromeshParas KumbalwarNo ratings yet
- Helical Gears: DefinitionDocument29 pagesHelical Gears: DefinitionMuthuvel MNo ratings yet
- Flange Coupling Lab PDFDocument25 pagesFlange Coupling Lab PDFAli Raza MalikNo ratings yet
- Lecture 4 - Mechanical Advantage, Transmission AngleDocument3 pagesLecture 4 - Mechanical Advantage, Transmission AngleMohankumarNo ratings yet
- Tech-03 Springs-Roll Stiffness-4 PDFDocument9 pagesTech-03 Springs-Roll Stiffness-4 PDFMibsão EsdrasNo ratings yet
- 4sthead Insight PDFDocument4 pages4sthead Insight PDFGuilherme PfeilstickerNo ratings yet
- 18ME53 B Scheme and Solution 20221Document19 pages18ME53 B Scheme and Solution 20221Thirumal K SNo ratings yet
- Series Hybrid Car Doc - 3Document137 pagesSeries Hybrid Car Doc - 3mekkararameshNo ratings yet
- Pneumatic Rod Bending Machine Project ReportDocument3 pagesPneumatic Rod Bending Machine Project ReportJeyakumar NNo ratings yet
- CAM Profile DiagramDocument9 pagesCAM Profile DiagramDivyesh Morabiya0% (1)
- Reciprocating Type Machine ToolsDocument18 pagesReciprocating Type Machine ToolsSpartan 117No ratings yet
- Ic EngineDocument23 pagesIc EngineGanesh kumar100% (1)
- Dom Unit II Imp QuestionsDocument2 pagesDom Unit II Imp QuestionsSree MurthyNo ratings yet
- Chapter 3 FlywheelDocument14 pagesChapter 3 Flywheelpixelo09No ratings yet
- Mechanics of Material Lab Report Angle of TwistDocument6 pagesMechanics of Material Lab Report Angle of TwistAhsan MumtazNo ratings yet
- Pulse Detonation Engine Full ReportDocument4 pagesPulse Detonation Engine Full ReportShahil ChatholilNo ratings yet
- Differential Transformation Method for Mechanical Engineering ProblemsFrom EverandDifferential Transformation Method for Mechanical Engineering ProblemsNo ratings yet
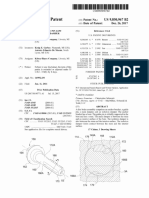
- US9874257Document8 pagesUS9874257marcglebNo ratings yet
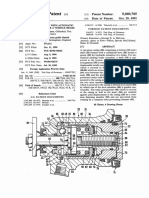
- US4331221Document12 pagesUS4331221marcglebNo ratings yet
- US5060765Document12 pagesUS5060765marcglebNo ratings yet
- US9850967Document8 pagesUS9850967marcglebNo ratings yet
- EP1469240A1Document12 pagesEP1469240A1marcglebNo ratings yet
- Kilic Clutch 2016Document7 pagesKilic Clutch 2016marcglebNo ratings yet
- Thermal Behavior of Friction Clutch DiscDocument11 pagesThermal Behavior of Friction Clutch DiscmarcglebNo ratings yet
- 402-2 - SAF Warranty Handling Shock AbsorberDocument13 pages402-2 - SAF Warranty Handling Shock AbsorbermarcglebNo ratings yet
- Attestination: WoniniDocument22 pagesAttestination: WoninimarcglebNo ratings yet
- Engineering Mechanics 2016: 22 International ConferenceDocument4 pagesEngineering Mechanics 2016: 22 International ConferencemarcglebNo ratings yet
- Stifness and Damping Characteristics of Rubber PDFDocument14 pagesStifness and Damping Characteristics of Rubber PDFmarcglebNo ratings yet
- VW 1.9L TDI Installation NoticeDocument4 pagesVW 1.9L TDI Installation Noticemarcgleb100% (1)
- Clutch TS Guide 8 PDFDocument84 pagesClutch TS Guide 8 PDFmarcglebNo ratings yet
- Fault Finding Guide WebDocument39 pagesFault Finding Guide Webmarcgleb100% (1)
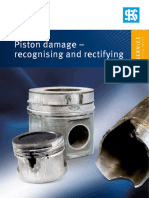
- KS Schadensbroschüre Englisch PDFDocument92 pagesKS Schadensbroschüre Englisch PDFmarcglebNo ratings yet
- Engine Throtle FailureDocument2 pagesEngine Throtle FailuremarcglebNo ratings yet
- Pierburg PG - Si - 0096 - 30304465Document1 pagePierburg PG - Si - 0096 - 30304465marcglebNo ratings yet
- Why Bad Presentations Happen To Good Causes - Andy GoodmanDocument100 pagesWhy Bad Presentations Happen To Good Causes - Andy GoodmanterryboothNo ratings yet
- A Guide To Facilitating Adult Learning PDFDocument30 pagesA Guide To Facilitating Adult Learning PDFmarcgleb100% (1)
- Knowledge Comprehension Applications Analysis Synthesis EvaluationsDocument1 pageKnowledge Comprehension Applications Analysis Synthesis EvaluationsmarcglebNo ratings yet
- Procedure For Evaluation of Rubber Bushing ComponentsDocument12 pagesProcedure For Evaluation of Rubber Bushing ComponentsmarcglebNo ratings yet
- Project Management PDFDocument10 pagesProject Management PDFJamalNo ratings yet
- Manual de Partes Dm45-50-lDocument690 pagesManual de Partes Dm45-50-lklausNo ratings yet
- Packing Shipping InstructionsDocument2 pagesPacking Shipping InstructionsJ.V. Siritt ChangNo ratings yet
- Instructions For Comprehensive Exams NovemberDocument2 pagesInstructions For Comprehensive Exams Novembermanoj reddyNo ratings yet
- Latest Eassy Writing Topics For PracticeDocument18 pagesLatest Eassy Writing Topics For PracticeAnjani Kumar RaiNo ratings yet
- Id or Class Are SimplyDocument5 pagesId or Class Are SimplyK CorNo ratings yet
- AP Physics Name: AP Thermal PracticeDocument2 pagesAP Physics Name: AP Thermal PracticeMuddamsetty ArunkalyanNo ratings yet
- Inteligen NT BB - NTC BB Datasheet PDFDocument4 pagesInteligen NT BB - NTC BB Datasheet PDFfrancis erl ligsayNo ratings yet
- 1.2 Server Operating SystemDocument20 pages1.2 Server Operating SystemAzhar AhmadNo ratings yet
- BCK Test Ans (Neha)Document3 pagesBCK Test Ans (Neha)Neha GargNo ratings yet
- 1178-Addendum-Change in Sponsor - HDFC LTD To HDFC Bank - July 1, 2023Document3 pages1178-Addendum-Change in Sponsor - HDFC LTD To HDFC Bank - July 1, 2023Jai Shree Ambe EnterprisesNo ratings yet
- Aquamaster 3 Flow Measurement: Saving Every Drop of Energy and Cost Naturally!Document7 pagesAquamaster 3 Flow Measurement: Saving Every Drop of Energy and Cost Naturally!FIRMANSYAHNo ratings yet
- Ranking - Best Multivitamins in 2018Document7 pagesRanking - Best Multivitamins in 2018JosephVillanuevaNo ratings yet
- TCRP Wheel Rail Noise ReportDocument220 pagesTCRP Wheel Rail Noise ReportAnonymous OmwbxkB100% (1)
- Boeing 247 NotesDocument5 pagesBoeing 247 Notesalbloi100% (1)
- Toyota Auris Corolla 2007 2013 Electrical Wiring DiagramDocument22 pagesToyota Auris Corolla 2007 2013 Electrical Wiring Diagrampriscillasalas040195ori100% (125)
- U HalliburtonDocument3 pagesU Halliburtonanas soufNo ratings yet
- Analisa SWOT Manajemen Pendidikan Di SMK Maarif 1 KebumenDocument29 pagesAnalisa SWOT Manajemen Pendidikan Di SMK Maarif 1 Kebumenahmad prayogaNo ratings yet
- Gitanjali Gems Annual Report FY2012-13Document120 pagesGitanjali Gems Annual Report FY2012-13Himanshu JainNo ratings yet
- STAAD Seismic AnalysisDocument5 pagesSTAAD Seismic AnalysismabuhamdNo ratings yet
- Raport de Incercare TL 82 Engleza 2015 MasticDocument3 pagesRaport de Incercare TL 82 Engleza 2015 MasticRoxana IoanaNo ratings yet
- MCA Proposal For OutsourcingDocument2 pagesMCA Proposal For OutsourcingLazaros KarapouNo ratings yet
- Roasted and Ground Coffee Manufacturing Industry Feasibility StudyDocument22 pagesRoasted and Ground Coffee Manufacturing Industry Feasibility StudyGhirmaye AbebeNo ratings yet
- 1849 1862 Statutes at Large 601-779Document200 pages1849 1862 Statutes at Large 601-779ncwazzyNo ratings yet
- Midterm Quiz 1 March 9.2021 QDocument5 pagesMidterm Quiz 1 March 9.2021 QThalia RodriguezNo ratings yet
- Book Shop InventoryDocument21 pagesBook Shop InventoryAli AnsariNo ratings yet
- Cassava Starch Granule Structure-Function Properties - Influence of Time and Conditions at Harvest On Four Cultivars of Cassava StarchDocument10 pagesCassava Starch Granule Structure-Function Properties - Influence of Time and Conditions at Harvest On Four Cultivars of Cassava Starchwahyuthp43No ratings yet
- MGT 3399: AI and Business Transformati ON: Dr. Islam AliDocument26 pagesMGT 3399: AI and Business Transformati ON: Dr. Islam AliaymanmabdelsalamNo ratings yet
- Pas 1, Presentation of Financial Statements: Philippine Institute of Certified Public AccountantsDocument38 pagesPas 1, Presentation of Financial Statements: Philippine Institute of Certified Public AccountantsAie GeraldinoNo ratings yet
- Comprehensive Drug Abuse Prevention and Control Act of 1970Document2 pagesComprehensive Drug Abuse Prevention and Control Act of 1970Bryan AbestaNo ratings yet