You might also like
- S650 Service - 6987168 enUS SMDocument1,311 pagesS650 Service - 6987168 enUS SMcarlos andres salazar sanchez75% (4)
- West Systems Fiberglass Boat Repair & MaintenanceDocument91 pagesWest Systems Fiberglass Boat Repair & MaintenanceDonát Nagy100% (2)
- Design of A Supersonic NozzleDocument39 pagesDesign of A Supersonic NozzlePandel0% (1)
- Susan Abbotson - Critical Companion To Arthur Miller - A Literary Reference To His Life and Work-Facts On File (2007) PDFDocument529 pagesSusan Abbotson - Critical Companion To Arthur Miller - A Literary Reference To His Life and Work-Facts On File (2007) PDFTaha Tariq0% (1)
- Soil Nailing and Rock Anchors ExplainedDocument21 pagesSoil Nailing and Rock Anchors ExplainedMark Anthony Agnes AmoresNo ratings yet
- Socomec EN61439 PDFDocument8 pagesSocomec EN61439 PDFdesportista_luisNo ratings yet
- Learn Statistics Fast: A Simplified Detailed Version for StudentsFrom EverandLearn Statistics Fast: A Simplified Detailed Version for StudentsNo ratings yet
- Finesse Service ManualDocument34 pagesFinesse Service ManualLuis Sivira100% (1)
- Summer Training Report On HCLDocument60 pagesSummer Training Report On HCLAshwani BhallaNo ratings yet
- Data Mining - Bayesian ClassificationDocument6 pagesData Mining - Bayesian ClassificationRaj EndranNo ratings yet
- Classifier Conditional Posterior Probabilities: Robert P.W. Duin, David M.J. TaxDocument9 pagesClassifier Conditional Posterior Probabilities: Robert P.W. Duin, David M.J. Taxtidjani86No ratings yet
- 05 Nearest Neighbor and Bayesian ClassifiersDocument33 pages05 Nearest Neighbor and Bayesian ClassifiersOscar WongNo ratings yet
- Uncertainty Based Classification Fusion - A Soft-Biometrics Test CaseDocument4 pagesUncertainty Based Classification Fusion - A Soft-Biometrics Test CaseHugo GamboaNo ratings yet
- Naive Bayesian Classifier ReportDocument6 pagesNaive Bayesian Classifier Reportankit sauravNo ratings yet
- Random Variables: Corr (X, Y) Cov (X, Y) / Cov (X, Y) Is The Covariance (X, Y)Document15 pagesRandom Variables: Corr (X, Y) Cov (X, Y) / Cov (X, Y) Is The Covariance (X, Y)viktahjmNo ratings yet
- Machine Leraning Unit 2Document62 pagesMachine Leraning Unit 2rishuraijaishreeramNo ratings yet
- Lesson 3.3 - Supervised Learning Rule Based ClassificationDocument43 pagesLesson 3.3 - Supervised Learning Rule Based ClassificationTayyaba FaisalNo ratings yet
- A5 PDFDocument9 pagesA5 PDFsagarNo ratings yet
- ECE523 Engineering Applications of Machine Learning and Data Analytics - Bayes and Risk - 1Document7 pagesECE523 Engineering Applications of Machine Learning and Data Analytics - Bayes and Risk - 1wandalexNo ratings yet
- Gaussian Process Tutorial by Andrew NGDocument13 pagesGaussian Process Tutorial by Andrew NGSethu SNo ratings yet
- Machine Learning Techniques for Probability and Bayesian ClassificationDocument64 pagesMachine Learning Techniques for Probability and Bayesian ClassificationRabia Babar KhanNo ratings yet
- Bayesian Classification: A Statistical Approach for Data ClassificationDocument16 pagesBayesian Classification: A Statistical Approach for Data ClassificationAhsan AsimNo ratings yet
- Sis Sonn PDFDocument4 pagesSis Sonn PDFHelloprojectNo ratings yet
- Pattern Recognition Unit 1 Chat GPTDocument13 pagesPattern Recognition Unit 1 Chat GPTbhaiyahello15No ratings yet
- 123 WPS OfficeDocument7 pages123 WPS OfficeMichael GreyNo ratings yet
- Unit 2Document5 pagesUnit 2Saral ManeNo ratings yet
- An Introduction To Objective Bayesian Statistics PDFDocument69 pagesAn Introduction To Objective Bayesian Statistics PDFWaterloo Ferreira da SilvaNo ratings yet
- Locallyweighted PDFDocument63 pagesLocallyweighted PDF楚天阔No ratings yet
- Geoff Bohling NonParClassDocument26 pagesGeoff Bohling NonParClassManael RidwanNo ratings yet
- CS 215 Data Analysis and Interpretation Sample QuestionsDocument10 pagesCS 215 Data Analysis and Interpretation Sample QuestionsVinayaka GosulaNo ratings yet
- EDA Lecture Module 2Document42 pagesEDA Lecture Module 2WINORLOSE100% (1)
- Debiasing Linear PredictionDocument37 pagesDebiasing Linear PredictionGaston GBNo ratings yet
- 3 - Bayesian ClassificationDocument15 pages3 - Bayesian ClassificationjanubandaruNo ratings yet
- Var Bayes LinregDocument14 pagesVar Bayes LinregzNo ratings yet
- Performance Analysis of Three ML ClassifiersDocument4 pagesPerformance Analysis of Three ML ClassifiersTiwari VivekNo ratings yet
- LFD 2005 Nearest NeighbourDocument6 pagesLFD 2005 Nearest NeighbourAnahi SánchezNo ratings yet
- Unit 5 Probabilistic ModelsDocument39 pagesUnit 5 Probabilistic ModelsRam100% (1)
- Gibbs sampling simulation complex distributions conditional distributionsDocument1 pageGibbs sampling simulation complex distributions conditional distributionsmuralidharanNo ratings yet
- Statistical Undecidability is Statistically UndecidableDocument4 pagesStatistical Undecidability is Statistically Undecidableadeka1No ratings yet
- Class condition density and decision boundariesDocument12 pagesClass condition density and decision boundariesMrunal BhilareNo ratings yet
- Machine Learning Lecture 6: Bayesian LearningDocument15 pagesMachine Learning Lecture 6: Bayesian Learningsaniaaisha11No ratings yet
- Imp Document3Document6 pagesImp Document3sgrrscNo ratings yet
- MISY 631 Final Review Calculators Will Be Provided For The ExamDocument9 pagesMISY 631 Final Review Calculators Will Be Provided For The ExamAniKelbakianiNo ratings yet
- Bayesian Analysis of Extreme Operational Losses: Chyng-Lan LiangDocument17 pagesBayesian Analysis of Extreme Operational Losses: Chyng-Lan LiangOnkar BagariaNo ratings yet
- K - Nearest Neighbours Classifier / RegressorDocument35 pagesK - Nearest Neighbours Classifier / RegressorSmitNo ratings yet
- Training Data Selection for SVM ClassifiersDocument11 pagesTraining Data Selection for SVM ClassifiersPrince GurajenaNo ratings yet
- Continuous Probability Distributions: Supporting Australian Mathematics ProjectDocument29 pagesContinuous Probability Distributions: Supporting Australian Mathematics ProjectJohn Lloyd AlforqueNo ratings yet
- Linear Asymmetric Classifier For Cascade Detectors: Figure 1. Illustration of A Cascade With R NodesDocument8 pagesLinear Asymmetric Classifier For Cascade Detectors: Figure 1. Illustration of A Cascade With R NodesArtūras KairysNo ratings yet
- Ai&ml Module 5 FinalDocument14 pagesAi&ml Module 5 Finalprajna.sg241No ratings yet
- M3 Kalman Filter EquationsDocument131 pagesM3 Kalman Filter EquationsHang CuiNo ratings yet
- THE ULTRAMETRIC PROPERTIES OF BINARY DATASETS P. WILCZEK Silesian - J - Pure - Appl - Math - v6 - I1 - STR - 069-084Document16 pagesTHE ULTRAMETRIC PROPERTIES OF BINARY DATASETS P. WILCZEK Silesian - J - Pure - Appl - Math - v6 - I1 - STR - 069-084Piotr WilczekNo ratings yet
- Sample-Based Classification Rules and Error RatesDocument11 pagesSample-Based Classification Rules and Error RatesMoein RazaviNo ratings yet
- IIT Kanpur Machine Learning End Sem PaperDocument10 pagesIIT Kanpur Machine Learning End Sem PaperJivnesh SandhanNo ratings yet
- Jalali@mshdiua - Ac.ir Jalali - Mshdiau.ac - Ir: Data MiningDocument16 pagesJalali@mshdiua - Ac.ir Jalali - Mshdiau.ac - Ir: Data MiningMostafa HeidaryNo ratings yet
- Comparison of SVM, kNN, and Naive Bayes in Text ClassificationDocument10 pagesComparison of SVM, kNN, and Naive Bayes in Text ClassificationANDRES DAVID DOMINGUEZ ROZONo ratings yet
- 15 Ec 834Document26 pages15 Ec 834Rocky 1999No ratings yet
- Probabilistic Models and Discriminative LearningDocument18 pagesProbabilistic Models and Discriminative LearningChrsan Ram100% (1)
- Extended Bayesian Information Criteria For Model Selection With Large Model SpacesDocument27 pagesExtended Bayesian Information Criteria For Model Selection With Large Model SpacesJuan CarNo ratings yet
- An_experimental_study_of_learning_curves_for_statistical_pattern_classifiersDocument4 pagesAn_experimental_study_of_learning_curves_for_statistical_pattern_classifiersAnabel GarcíaNo ratings yet
- Python RelatedDocument8 pagesPython RelatedPrasanth ThNo ratings yet
- Chapter 6Document14 pagesChapter 6AbimbolaNo ratings yet
- Instance Based Learning: November 2015Document11 pagesInstance Based Learning: November 2015Manu SNo ratings yet
- Partial Inverse Regression: Biometrika (2007), 94, 3, Pp. 615-625 Printed in Great BritainDocument12 pagesPartial Inverse Regression: Biometrika (2007), 94, 3, Pp. 615-625 Printed in Great BritainLiliana ForzaniNo ratings yet
- Davy Depth Based ClassifierDocument33 pagesDavy Depth Based ClassifierSanjay KumarNo ratings yet
- 1 Matching: M. Anderson, Lecture Notes 6, ARE 213 Spring 2008Document22 pages1 Matching: M. Anderson, Lecture Notes 6, ARE 213 Spring 2008Khánh MinhNo ratings yet
- A Tutorial on ν-Support Vector Machines: 1 An Introductory ExampleDocument29 pagesA Tutorial on ν-Support Vector Machines: 1 An Introductory Exampleaxeman113No ratings yet
- Lect 35Document5 pagesLect 35Nguyễn Minh HoàngNo ratings yet
- Assignment 11: Unit 12 - Week 11Document3 pagesAssignment 11: Unit 12 - Week 11aeroacademicNo ratings yet
- Assignment 12: Unit 13 - Week 12Document3 pagesAssignment 12: Unit 13 - Week 12aeroacademicNo ratings yet
- Assignment 10: Unit 11 - Week 10Document3 pagesAssignment 10: Unit 11 - Week 10aeroacademicNo ratings yet
- Prop RelationsDocument5 pagesProp RelationsaeroacademicNo ratings yet
- Assignment 11: Unit 12 - Week 11Document3 pagesAssignment 11: Unit 12 - Week 11aeroacademicNo ratings yet
- Assignment 03: Unit 4 - Week 3Document5 pagesAssignment 03: Unit 4 - Week 3aeroacademicNo ratings yet
- Aircraft Stability and Control Quiz AnswersDocument3 pagesAircraft Stability and Control Quiz AnswersaeroacademicNo ratings yet
- Assignment 07: Unit 8 - Week 7Document3 pagesAssignment 07: Unit 8 - Week 7aeroacademicNo ratings yet
- Noc19-Ae10 Assignment Week 09Document3 pagesNoc19-Ae10 Assignment Week 09aeroacademicNo ratings yet
- Aircraft Stability Quiz AnswersDocument4 pagesAircraft Stability Quiz AnswersaeroacademicNo ratings yet
- Assignment 01: Unit 2 - Week 1Document3 pagesAssignment 01: Unit 2 - Week 1Parkash SinghNo ratings yet
- Aircraft Stability and Control Quiz AnswersDocument3 pagesAircraft Stability and Control Quiz AnswersaeroacademicNo ratings yet
- Washington1993 CurvatureDocument9 pagesWashington1993 CurvatureaeroacademicNo ratings yet
- Numerical Study On Drag Reduction For Grid-Fin ConfigurationsDocument10 pagesNumerical Study On Drag Reduction For Grid-Fin ConfigurationsaeroacademicNo ratings yet
- Ngineering Otes: Drag Reduction For Sweptback Grid Fin With Blunt and Sharp Leading EdgesDocument6 pagesNgineering Otes: Drag Reduction For Sweptback Grid Fin With Blunt and Sharp Leading EdgesaeroacademicNo ratings yet
- Grid Fins New Concept Missile Stability and Control: Alaa A ForDocument12 pagesGrid Fins New Concept Missile Stability and Control: Alaa A ForaeroacademicNo ratings yet
- Uncertainty AnalysisDocument26 pagesUncertainty AnalysisaeroacademicNo ratings yet
- Aerodynamic Numerical Simulation of Grid Fin ParametersDocument6 pagesAerodynamic Numerical Simulation of Grid Fin ParametersaeroacademicNo ratings yet
- Development of Flight Controller Using STM Microcontroller BoardDocument5 pagesDevelopment of Flight Controller Using STM Microcontroller BoardaeroacademicNo ratings yet
- Free/Libre and Open Source Software (FLOSS) Resources For Online CoursesDocument4 pagesFree/Libre and Open Source Software (FLOSS) Resources For Online CoursesaeroacademicNo ratings yet
- Tamil Guide For PrintDocument238 pagesTamil Guide For PrintaeroacademicNo ratings yet
- Answers: Exercise 1.1Document22 pagesAnswers: Exercise 1.1aeroacademicNo ratings yet
- BelieverDocument1 pageBelieveraeroacademicNo ratings yet
- Sizing of A Turboprop Unmanned Air Vehicle and Its Propulsion SystemDocument10 pagesSizing of A Turboprop Unmanned Air Vehicle and Its Propulsion SystemaeroacademicNo ratings yet
- Suresh C Khandai - 2Document9 pagesSuresh C Khandai - 2aeroacademicNo ratings yet
- B BPP Prog Guide-EDocument29 pagesB BPP Prog Guide-EaeroacademicNo ratings yet
- Suresh C Khandai - 1Document9 pagesSuresh C Khandai - 1aeroacademicNo ratings yet
- Tense FormsDocument1 pageTense FormsaeroacademicNo ratings yet
- Smart Materials for Aerospace Actuators and SensorsDocument13 pagesSmart Materials for Aerospace Actuators and SensorsaeroacademicNo ratings yet
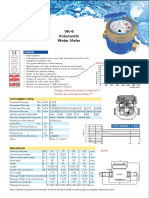
- Baylan: VK-6 Volumetric Water MeterDocument1 pageBaylan: VK-6 Volumetric Water MeterSanjeewa ChathurangaNo ratings yet
- Final Year Project A Report Assessment Form (10%)Document5 pagesFinal Year Project A Report Assessment Form (10%)Chong Ru YinNo ratings yet
- AGCC Response of Performance Completed Projects Letter of recommendAGCC SS PDFDocument54 pagesAGCC Response of Performance Completed Projects Letter of recommendAGCC SS PDFAnonymous rIKejWPuS100% (1)
- FTC470XETDocument2 pagesFTC470XETDecebal ScorilloNo ratings yet
- Whitmore EZ-Switch LubricantDocument1 pageWhitmore EZ-Switch LubricantDon HowardNo ratings yet
- DMT80600L104 21WTR Datasheet DATASHEETDocument3 pagesDMT80600L104 21WTR Datasheet DATASHEETtnenNo ratings yet
- DX DiagDocument31 pagesDX DiagJose Trix CamposNo ratings yet
- 028 Ptrs Modul Matematik t4 Sel-96-99Document4 pages028 Ptrs Modul Matematik t4 Sel-96-99mardhiah88No ratings yet
- Danielle Smith: To Whom It May ConcernDocument2 pagesDanielle Smith: To Whom It May ConcernDanielle SmithNo ratings yet
- Appendix 9A: Standard Specifications For Electrical DesignDocument5 pagesAppendix 9A: Standard Specifications For Electrical Designzaheer ahamedNo ratings yet
- Caf 8 Aud Spring 2022Document3 pagesCaf 8 Aud Spring 2022Huma BashirNo ratings yet
- 231025+ +JBS+3Q23+Earnings+Preview VFDocument3 pages231025+ +JBS+3Q23+Earnings+Preview VFgicokobayashiNo ratings yet
- TMA - ExerciseDocument3 pagesTMA - ExercisemorrisioNo ratings yet
- Key Payment For Japan EcomercesDocument9 pagesKey Payment For Japan EcomercesChoo YieNo ratings yet
- Coronary artery diseases reviewDocument43 pagesCoronary artery diseases reviewKeputrian FKUPNo ratings yet
- Analysis of Financial Ratios of Manufacturing CompaniesDocument61 pagesAnalysis of Financial Ratios of Manufacturing CompaniesNine ZetNo ratings yet
- Cambridge IGCSE: GEOGRAPHY 0460/13Document32 pagesCambridge IGCSE: GEOGRAPHY 0460/13Desire KandawasvikaNo ratings yet
- Nº SSR-1 NS-R-3 Draf R1 Site Evaluation For Nuclear Installations FRDocument33 pagesNº SSR-1 NS-R-3 Draf R1 Site Evaluation For Nuclear Installations FRdaniel addeNo ratings yet
- Kooltherm PipeDocument8 pagesKooltherm Pipenaseema1No ratings yet
- Engineering Ethics in Practice ShorterDocument79 pagesEngineering Ethics in Practice ShorterPrashanta NaikNo ratings yet
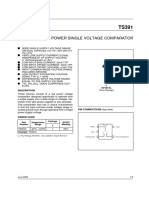
- Ts 391 IltDocument5 pagesTs 391 IltFunnypoumNo ratings yet
- COA (Odoo Egypt)Document8 pagesCOA (Odoo Egypt)menams2010No ratings yet
- November 2022 Examination: Indian Institution of Industrial Engineering Internal Assignment For IIIE StudentsDocument19 pagesNovember 2022 Examination: Indian Institution of Industrial Engineering Internal Assignment For IIIE Studentssatish gordeNo ratings yet