You might also like
- Modelling, Simulation and Control of A Hydraulic CraneDocument137 pagesModelling, Simulation and Control of A Hydraulic Cranefelo3450% (1)
- 4 A Industrial RevolutionDocument41 pages4 A Industrial Revolutionabekhti2008No ratings yet
- How To Guide To Oauth and API SecurityDocument12 pagesHow To Guide To Oauth and API Securitysilviuleahu100% (1)
- Building ElevatorsDocument77 pagesBuilding Elevatorselmodeer9841100% (5)
- Kinematics and Dynamics of Roller Chain DrivesDocument200 pagesKinematics and Dynamics of Roller Chain DrivesRodrigo Marin100% (1)
- Spacecraft Dynamics and Control: The Embedded Model Control ApproachFrom EverandSpacecraft Dynamics and Control: The Embedded Model Control ApproachRating: 5 out of 5 stars5/5 (1)
- Physics KinematicsDocument34 pagesPhysics KinematicsSammasterzNo ratings yet
- Guest AccountingDocument8 pagesGuest Accountingjhen01gongonNo ratings yet
- Mechanics: Problems in Undergraduate PhysicsFrom EverandMechanics: Problems in Undergraduate PhysicsRating: 3.5 out of 5 stars3.5/5 (2)
- Computational Fluid Dynamics For Naval Engineering ProblemsDocument184 pagesComputational Fluid Dynamics For Naval Engineering ProblemsandevariNo ratings yet
- Design of A Controllable PitchDocument114 pagesDesign of A Controllable PitchPoowadol Niyomka100% (2)
- Operational Business Suite Contract by SSNIT Signed in 2012Document16 pagesOperational Business Suite Contract by SSNIT Signed in 2012GhanaWeb EditorialNo ratings yet
- Offshore Pipelaying DynamicsDocument150 pagesOffshore Pipelaying DynamicsfredisterikNo ratings yet
- Efficient Prediction of Dynamic Responses-DelftDocument178 pagesEfficient Prediction of Dynamic Responses-DelfttompmathaiNo ratings yet
- Malaysian StandardsDocument54 pagesMalaysian StandardsMax145683% (6)
- Malaysian StandardsDocument54 pagesMalaysian StandardsMax145683% (6)
- Blockchain Unit Wise Question BankDocument3 pagesBlockchain Unit Wise Question BankMeghana50% (4)
- Art 3 Sec 2Document157 pagesArt 3 Sec 2KELVINNo ratings yet
- Arihant AIEEE PhysicsDocument376 pagesArihant AIEEE Physicssachchidanandpatel50% (4)
- Coupled Dynamic Simulation of A Tug-Towline-TowedDocument9 pagesCoupled Dynamic Simulation of A Tug-Towline-TowedSiddhant AgarwalNo ratings yet
- Toward Optimization Using Unsteady CFD SimulationDocument6 pagesToward Optimization Using Unsteady CFD SimulationAntonio LopezNo ratings yet
- Wave Particles: Project Report For COMP-764B Fahim Mannan 260 266 294Document7 pagesWave Particles: Project Report For COMP-764B Fahim Mannan 260 266 294fmannanNo ratings yet
- TesisDocument84 pagesTesisPablo PérezNo ratings yet
- Full Text 01Document132 pagesFull Text 01ThiagarajanNo ratings yet
- A Ship Motion Simulation SystemDocument11 pagesA Ship Motion Simulation SystemBENNo ratings yet
- 3D Affine Coordinate Transformations: Constantin-Octavian AndreiDocument63 pages3D Affine Coordinate Transformations: Constantin-Octavian AndreisayurisayuriNo ratings yet
- The Final Round of The First World Physics Olympiad Held in Lombok, West Nusa Tenggara, Indonesia: A Sample of Problems and Solutions and Student ResultsDocument21 pagesThe Final Round of The First World Physics Olympiad Held in Lombok, West Nusa Tenggara, Indonesia: A Sample of Problems and Solutions and Student Resultstraja202No ratings yet
- Comparison of SwimmerDocument11 pagesComparison of SwimmerTreeNo ratings yet
- Short Research On Stream FunctionDocument19 pagesShort Research On Stream FunctionFarooq ShahNo ratings yet
- Modeling and Simulation Method of Flight TrajectorDocument7 pagesModeling and Simulation Method of Flight Trajectorleorio88No ratings yet
- Mathemeatical Model of Glider TrajectoryDocument6 pagesMathemeatical Model of Glider TrajectoryAyanilNo ratings yet
- Crank and Slotted Lever Quick Return (Rev2)Document9 pagesCrank and Slotted Lever Quick Return (Rev2)Vipin YadavNo ratings yet
- Laboratory Session #5 Velocity Measurement in A Wind TunnelDocument5 pagesLaboratory Session #5 Velocity Measurement in A Wind TunnelIrfan AshiqNo ratings yet
- AUV Design Intelligent Vehicle Using Sensor Fusion Control SchemeDocument4 pagesAUV Design Intelligent Vehicle Using Sensor Fusion Control SchemeSachin SharmaNo ratings yet
- Trajectories and Radius, Velocity, AccelerationDocument12 pagesTrajectories and Radius, Velocity, AccelerationEpic WinNo ratings yet
- D2 - Crank and Slider MechanismDocument18 pagesD2 - Crank and Slider MechanismAfif HaziqNo ratings yet
- Eth 984 02Document187 pagesEth 984 02AlexandreSidantNo ratings yet
- DTMPC Iccgs2019Document8 pagesDTMPC Iccgs2019ali bendlalaNo ratings yet
- Xu 2012Document6 pagesXu 2012HoàngThơmNo ratings yet
- 1 s2.0 S1001605811603119 MainDocument8 pages1 s2.0 S1001605811603119 MainMason SaidNo ratings yet
- Experiment8 JOSHUA TO EHDocument11 pagesExperiment8 JOSHUA TO EHPauSomerhalderNo ratings yet
- Fluid Mechanics of Planets and Stars (Le Bars, Lecoanet)Document247 pagesFluid Mechanics of Planets and Stars (Le Bars, Lecoanet)JorgeOchoaNo ratings yet
- E1HKAL 2011 v14n2 138Document10 pagesE1HKAL 2011 v14n2 138awan syafrieNo ratings yet
- Quadcopter Math Model (Amazing)Document26 pagesQuadcopter Math Model (Amazing)Joseph Oberholtzer83% (6)
- The Accuracy of Computational Fluid Dynamics Analysis PDFDocument19 pagesThe Accuracy of Computational Fluid Dynamics Analysis PDFfahrgeruste3961No ratings yet
- Attitude Estimation of Quadcopter Through Extended Kalman FilterDocument42 pagesAttitude Estimation of Quadcopter Through Extended Kalman FilterAbdullah Sindhu100% (2)
- Nitrkl ThesisDocument4 pagesNitrkl ThesisBuyingPaperErie100% (2)
- The Influence of Cracks in Rotating Shafts: To Cite This VersionDocument26 pagesThe Influence of Cracks in Rotating Shafts: To Cite This VersionbungrisNo ratings yet
- Trajectory Generation For High Speed Pick-and-Place Robots: Cornelius Barnard, Sébastien Briot, Stéphane CaroDocument11 pagesTrajectory Generation For High Speed Pick-and-Place Robots: Cornelius Barnard, Sébastien Briot, Stéphane Carosifo mohNo ratings yet
- Module 1 Intro. To Machine Elements 1Document10 pagesModule 1 Intro. To Machine Elements 1Francilei Shumailah TolibasNo ratings yet
- The Development of Multi-AxisDocument148 pagesThe Development of Multi-AxissyedabdulhannanNo ratings yet
- Part B - Viscous FlowDocument68 pagesPart B - Viscous FlowSamNo ratings yet
- D5.8 Final Flow Field Model After Testing PeriodDocument21 pagesD5.8 Final Flow Field Model After Testing PeriodSubal VinayanNo ratings yet
- DepressorDocument46 pagesDepressorJithin P NNo ratings yet
- LINK Shop ExerciseDocument15 pagesLINK Shop ExerciseNicole MilanNo ratings yet
- AssignmentDocument10 pagesAssignmentTanmay dograNo ratings yet
- Design of Ship-Engine-Propeller Simultaneous Matching and Development of A Propeller and Engine Selecting SystemDocument10 pagesDesign of Ship-Engine-Propeller Simultaneous Matching and Development of A Propeller and Engine Selecting SystembeNo ratings yet
- Movement Equations 2: Mathematical and Methodological SupplementsFrom EverandMovement Equations 2: Mathematical and Methodological SupplementsNo ratings yet
- Mazlan's Lecture MNE - Lifts and Elevators - 1stDocument15 pagesMazlan's Lecture MNE - Lifts and Elevators - 1stAzam RoslanNo ratings yet
- D Internet Myiemorgmy Intranet Assets Doc Alldoc Document 9958 METD Talk On Lift Regulations Malaysian StandardsDocument1 pageD Internet Myiemorgmy Intranet Assets Doc Alldoc Document 9958 METD Talk On Lift Regulations Malaysian StandardsAzam RoslanNo ratings yet
- Elevator Design ResearchDocument11 pagesElevator Design ResearchAzam RoslanNo ratings yet
- Service Description Qty Price (MYR) Total (MYR)Document2 pagesService Description Qty Price (MYR) Total (MYR)Azam RoslanNo ratings yet
- Elevator Calculations: Belt Speed in M/sec (V) Elevator CalculationsDocument2 pagesElevator Calculations: Belt Speed in M/sec (V) Elevator CalculationsAnonymous ITnkbIEFNo ratings yet
- Survey Questions AnalysisDocument3 pagesSurvey Questions AnalysisAzam RoslanNo ratings yet
- Pie Chart SurveyDocument7 pagesPie Chart SurveyAzam RoslanNo ratings yet
- AssignmentsDocument1 pageAssignmentsAzam RoslanNo ratings yet
- Lecture No1Document14 pagesLecture No1Azam RoslanNo ratings yet
- Memb 322 - Mechanical Design Process Project InstructionDocument1 pageMemb 322 - Mechanical Design Process Project InstructionAzam RoslanNo ratings yet
- Name: - Section: 5 6 7 Student's I/dDocument2 pagesName: - Section: 5 6 7 Student's I/dAzam RoslanNo ratings yet
- Course Outline MDPDocument10 pagesCourse Outline MDPAzam RoslanNo ratings yet
- Answers To Selected Haomework ProblemsDocument32 pagesAnswers To Selected Haomework ProblemsAzam RoslanNo ratings yet
- Sterling PumpeDocument20 pagesSterling PumpesrdzaNo ratings yet
- Group H Macroeconomics Germany InflationDocument13 pagesGroup H Macroeconomics Germany Inflationmani kumarNo ratings yet
- MLCP - Area State Ment - 09th Jan 2015Document5 pagesMLCP - Area State Ment - 09th Jan 201551921684No ratings yet
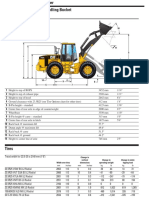
- Cat It62hDocument4 pagesCat It62hMarceloNo ratings yet
- SAN MIGUEL CORPORATION, ANGEL G. ROA and MELINDA MACARAIG, vs. NATIONAL LABOR RELATIONS COMMISSION (Second Division), LABOR ARBITER EDUARDO J. CARPIO, ILAW AT BUKLOD NG MANGGAGAWA (IBM), ET ALDocument6 pagesSAN MIGUEL CORPORATION, ANGEL G. ROA and MELINDA MACARAIG, vs. NATIONAL LABOR RELATIONS COMMISSION (Second Division), LABOR ARBITER EDUARDO J. CARPIO, ILAW AT BUKLOD NG MANGGAGAWA (IBM), ET ALLaila Ismael SalisaNo ratings yet
- Fpga De0-Nano User Manual PDFDocument155 pagesFpga De0-Nano User Manual PDFCesarNo ratings yet
- Procurement Systems and Tools RoundTable Notes (Europe) 13 Oct 2020 - 0Document8 pagesProcurement Systems and Tools RoundTable Notes (Europe) 13 Oct 2020 - 0SathishkumarNo ratings yet
- Form Ticketing Latihan ContohDocument29 pagesForm Ticketing Latihan ContohASPIN SURYONONo ratings yet
- Nelson/Salmo Pennywise March 15, 2016Document48 pagesNelson/Salmo Pennywise March 15, 2016Pennywise PublishingNo ratings yet
- Qrqs"1 Xl/Ijj1L Joi?Llt'Lll: Transport Bhawan, 1, Parliament Street New Delhi-110001Document2 pagesQrqs"1 Xl/Ijj1L Joi?Llt'Lll: Transport Bhawan, 1, Parliament Street New Delhi-110001PrakashKommukuriNo ratings yet
- Invidis Yearbook 2019Document51 pagesInvidis Yearbook 2019Luis SanchezNo ratings yet
- Lucero Flores Resume 2Document2 pagesLucero Flores Resume 2api-260292914No ratings yet
- Refference 01 Sheethal Visa Rejection Reason ExplanationDocument3 pagesRefference 01 Sheethal Visa Rejection Reason ExplanationAniket PatelNo ratings yet
- Juniper M5 M10 DatasheetDocument6 pagesJuniper M5 M10 DatasheetMohammed Ali ZainNo ratings yet
- Crystallization of Para-Xylene in Scraped-Surface CrystallizersDocument11 pagesCrystallization of Para-Xylene in Scraped-Surface Crystallizersanax22No ratings yet
- Section 12-22, Art. 3, 1987 Philippine ConstitutionDocument3 pagesSection 12-22, Art. 3, 1987 Philippine ConstitutionKaren LabogNo ratings yet
- Sowk-625 Iq Tool 4Document22 pagesSowk-625 Iq Tool 4api-405320544No ratings yet
- Piccadilly Circus BusDocument1 pagePiccadilly Circus Busmeylota2No ratings yet
- Technical Specification For Flue Gas Desulfurization of Thermal Power Plant Limestone / Lime - Gypsum MethodDocument17 pagesTechnical Specification For Flue Gas Desulfurization of Thermal Power Plant Limestone / Lime - Gypsum Methodpramod_tryNo ratings yet
- Low Cost CompaniesDocument9 pagesLow Cost CompaniesIvan RodriguezNo ratings yet
- Cyber Cafe Audience Profiling Nielsen 2009Document17 pagesCyber Cafe Audience Profiling Nielsen 2009mahi46452No ratings yet
- Chapter 3 - A Top-Level View of Computer Function and InterconnectionDocument8 pagesChapter 3 - A Top-Level View of Computer Function and InterconnectionChu Quang HuyNo ratings yet
- 1 General: Fig. 1.1 Industrial RobotDocument40 pages1 General: Fig. 1.1 Industrial RobotArunNo ratings yet
- Title To The ProjectDocument14 pagesTitle To The ProjectJatinChadhaNo ratings yet