You might also like
- Ball MillDocument23 pagesBall MillSajjad Rasool ChaudhryNo ratings yet
- Introduction To NAATI CCL Urdu TestDocument29 pagesIntroduction To NAATI CCL Urdu TestSajjad Rasool ChaudhryNo ratings yet
- PolyesterDocument13 pagesPolyesterSajjad Rasool ChaudhryNo ratings yet
- Numerical Simulation of Turbulent Flow Using Lattice Boltzman MethodDocument66 pagesNumerical Simulation of Turbulent Flow Using Lattice Boltzman MethodSajjad Rasool ChaudhryNo ratings yet
- Grid Refinment in LBMDocument19 pagesGrid Refinment in LBMSajjad Rasool ChaudhryNo ratings yet
- API - Cooling Tower (Section 1) PDFDocument44 pagesAPI - Cooling Tower (Section 1) PDFImtiaz AliNo ratings yet
- Uranium Minerals CharacteristicsDocument46 pagesUranium Minerals CharacteristicsSajjad Rasool ChaudhryNo ratings yet
- Basics of Lattice Boltzmann Method For Fluid FlowsDocument27 pagesBasics of Lattice Boltzmann Method For Fluid FlowsSajjad Rasool ChaudhryNo ratings yet
- Uranium and Thorium World ReservesDocument12 pagesUranium and Thorium World ReservesSajjad Rasool ChaudhryNo ratings yet
- A Process Report On Comparative Study of Production of Isoamyl Acetate by Fischer Esterification Using Different CatalystsDocument57 pagesA Process Report On Comparative Study of Production of Isoamyl Acetate by Fischer Esterification Using Different CatalystsSajjad Rasool ChaudhryNo ratings yet
- LBE Theory and Applications by SucciDocument53 pagesLBE Theory and Applications by SucciSajjad Rasool ChaudhryNo ratings yet
- LOOPS IN C++ (Presentation)Document9 pagesLOOPS IN C++ (Presentation)Sajjad Rasool ChaudhryNo ratings yet
- A Presentation On PumpsDocument34 pagesA Presentation On PumpsSajjad Rasool ChaudhryNo ratings yet
- International Systems and StandardsDocument109 pagesInternational Systems and StandardsSajjad Rasool ChaudhryNo ratings yet
- A Discussion On MS Windows & DOS (By Sajjad CH.)Document18 pagesA Discussion On MS Windows & DOS (By Sajjad CH.)Sajjad Rasool ChaudhryNo ratings yet
- Industrial Training at SCILDocument23 pagesIndustrial Training at SCILSajjad Rasool ChaudhryNo ratings yet
- Collision TheoryDocument10 pagesCollision TheorySajjad Rasool ChaudhryNo ratings yet
- RTD CalibrationDocument20 pagesRTD CalibrationSajjad Rasool ChaudhryNo ratings yet
- Assignment (Plate and Frame Filter Press) Group A-8)Document22 pagesAssignment (Plate and Frame Filter Press) Group A-8)Sajjad Rasool Chaudhry0% (4)
- Internship Report at SCILDocument48 pagesInternship Report at SCILSajjad Rasool Chaudhry100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Las Tech Drafting 3Q WKDocument13 pagesLas Tech Drafting 3Q WKClemenda TuscanoNo ratings yet
- Manual of Sensorless Brushless Motor Speed Controller: Pentium SeriesDocument4 pagesManual of Sensorless Brushless Motor Speed Controller: Pentium Seriesfosavo5839No ratings yet
- Climbing FormworkDocument4 pagesClimbing FormworkAshwin B S RaoNo ratings yet
- Chillers VoltasDocument4 pagesChillers Voltasanil shuklaNo ratings yet
- 5 Contracting Activity and Technical Staff RequirementsDocument2 pages5 Contracting Activity and Technical Staff RequirementsDaniyar KussainovNo ratings yet
- ACR39U-U1: (USB Type A) Smart Card ReaderDocument8 pagesACR39U-U1: (USB Type A) Smart Card Readersuraj18in4uNo ratings yet
- DP November 2017 Examination Schedule en PDFDocument4 pagesDP November 2017 Examination Schedule en PDFSuperlucidoNo ratings yet
- MMW ReviewerDocument3 pagesMMW ReviewerMarcSaloj NeryNo ratings yet
- 12-Week Off-Season Training Programme Junior Rugby (U18 - U21)Document5 pages12-Week Off-Season Training Programme Junior Rugby (U18 - U21)LeBron JamesNo ratings yet
- AS and A Level: ChemistryDocument11 pagesAS and A Level: ChemistryStingy BieNo ratings yet
- 9A02502 Transmission of Electric PowerDocument6 pages9A02502 Transmission of Electric PowersivabharathamurthyNo ratings yet
- Hevi-Bar II and Safe-Lec 2Document68 pagesHevi-Bar II and Safe-Lec 2elkabongscribdNo ratings yet
- Hypothesis Testing - IDocument36 pagesHypothesis Testing - Isai revanthNo ratings yet
- AIR Conditioner: Owner'S ManualDocument52 pagesAIR Conditioner: Owner'S Manualashley diazNo ratings yet
- Regression Analysis Random Motors ProjectDocument22 pagesRegression Analysis Random Motors ProjectPrateek AgrawalNo ratings yet
- End of Summer Course Test August 2021Document16 pagesEnd of Summer Course Test August 2021Thanh Nguyen vanNo ratings yet
- Ecological Quality RatioDocument24 pagesEcological Quality RatiofoocheehungNo ratings yet
- Diagnosis of TrypanosomiasisDocument82 pagesDiagnosis of TrypanosomiasisDrVijayata Choudhary100% (1)
- Iec60227-3 (Ed2.1) en DDocument6 pagesIec60227-3 (Ed2.1) en Duntuk donlod aaaNo ratings yet
- ECE199R-C12 Final Document OJTDocument48 pagesECE199R-C12 Final Document OJTRigel ZabateNo ratings yet
- Investigation of Skew Curved Bridges in Combination With Skewed Abutments Under Seismic ResponseDocument5 pagesInvestigation of Skew Curved Bridges in Combination With Skewed Abutments Under Seismic ResponseEditor IJTSRDNo ratings yet
- Azure Machine Learning StudioDocument17 pagesAzure Machine Learning StudioNurain IsmailNo ratings yet
- Patel 2013Document116 pagesPatel 2013hnphuocNo ratings yet
- Orbitol Motor TMTHWDocument20 pagesOrbitol Motor TMTHWRodolfo ErenoNo ratings yet
- The Spirit Controlled Life Ebook PDF 1Document184 pagesThe Spirit Controlled Life Ebook PDF 1Okesola AbayomiNo ratings yet
- Filipino Construction TermsDocument6 pagesFilipino Construction TermsAdrian Perez75% (4)
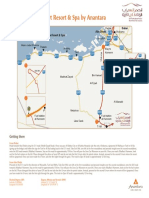
- Qasr Al Sarab Desert Resort Location Map June2012Document1 pageQasr Al Sarab Desert Resort Location Map June2012Anant GârgNo ratings yet
- 1n5711 RF Detector Diode 70v PIV DatasheetDocument3 pages1n5711 RF Detector Diode 70v PIV DatasheetgordslaterNo ratings yet
- Tips For A Healthy PregnancyDocument2 pagesTips For A Healthy PregnancyLizaNo ratings yet
- GB GW01 14 04 02Document2 pagesGB GW01 14 04 02Muhammad LukmanNo ratings yet