You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Liceet 2018 Paper 128Document5 pagesLiceet 2018 Paper 128Timothy FieldsNo ratings yet
- Olympus Epoch XTDocument8 pagesOlympus Epoch XTTimothy FieldsNo ratings yet
- Industrial DevelopmentDocument221 pagesIndustrial DevelopmentTimothy FieldsNo ratings yet
- Ontrol Ystems Ociety: Publications Content DigestDocument11 pagesOntrol Ystems Ociety: Publications Content DigestTimothy FieldsNo ratings yet
- Speed Monitor PDFDocument30 pagesSpeed Monitor PDFTimothy FieldsNo ratings yet
- Simatic St80 Add Ons Complete English 2015 OkDocument28 pagesSimatic St80 Add Ons Complete English 2015 OkTimothy FieldsNo ratings yet
- TURCK Ultrasonic SensorsDocument2 pagesTURCK Ultrasonic SensorsTimothy FieldsNo ratings yet
- CTACDocument13 pagesCTACTimothy FieldsNo ratings yet
- AC Drives: Siemens STEP 2000 CourseDocument37 pagesAC Drives: Siemens STEP 2000 CourseTimothy FieldsNo ratings yet
- 2013 Engineering MagazineDocument28 pages2013 Engineering MagazineTimothy FieldsNo ratings yet
- Consultancy ProjectsDocument3 pagesConsultancy ProjectsTimothy FieldsNo ratings yet
- Exam2 (Review Slides) PDFDocument8 pagesExam2 (Review Slides) PDFTimothy FieldsNo ratings yet
- Industrial AutomationDocument33 pagesIndustrial AutomationTimothy FieldsNo ratings yet
- Fellowship Application 2016 enDocument3 pagesFellowship Application 2016 enTimothy FieldsNo ratings yet
- Che 436 Competencies For Exam 2: Level 3Document8 pagesChe 436 Competencies For Exam 2: Level 3Timothy FieldsNo ratings yet
- Training IEC CE For Control Panels - April 2014 PDFDocument195 pagesTraining IEC CE For Control Panels - April 2014 PDFTimothy Fields100% (1)
- GSSScholarship 2017 enDocument4 pagesGSSScholarship 2017 enTimothy FieldsNo ratings yet
- Mobilizare Pasiva SoldDocument1 pageMobilizare Pasiva SoldTimothy FieldsNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Code PICDocument6 pagesCode PICsongbao527No ratings yet
- Senses of Success and The Rise of The Blockbuster by Charles AclandDocument9 pagesSenses of Success and The Rise of The Blockbuster by Charles AclandMittsouNo ratings yet
- Masonry - Block Joint Mortar 15bDocument1 pageMasonry - Block Joint Mortar 15bmanish260320No ratings yet
- 23 - Battery Sizing DischargeDocument19 pages23 - Battery Sizing Dischargechanchai T100% (4)
- Job Description - NOC EngineerDocument2 pagesJob Description - NOC EngineerMd ShujauddinNo ratings yet
- Guidelines For Layout and Format of The Proposal: 1. Page Margins (For All Pages) - Use A4 Size PaperDocument3 pagesGuidelines For Layout and Format of The Proposal: 1. Page Margins (For All Pages) - Use A4 Size PaperAummy CreationNo ratings yet
- ILO - Working Conditions of Contract Workers in The Oil and Gas IndustriesDocument106 pagesILO - Working Conditions of Contract Workers in The Oil and Gas IndustriesLuís Augusto Lopes100% (1)
- Ecen 607 CMFB-2011Document44 pagesEcen 607 CMFB-2011Girish K NathNo ratings yet
- Sika Cemflex 1Document3 pagesSika Cemflex 1rasasiNo ratings yet
- Arni AdvertisementDocument2 pagesArni AdvertisementHemanthNo ratings yet
- Clearcase Branching and Labeling Best Practices For Parallel DevelopmentDocument50 pagesClearcase Branching and Labeling Best Practices For Parallel DevelopmentakkachotuNo ratings yet
- Claa150xp Shenzhen HBDocument22 pagesClaa150xp Shenzhen HBSatya NarayanNo ratings yet
- 1-18 Easy Fix Double Glazing Counter Price ListDocument16 pages1-18 Easy Fix Double Glazing Counter Price ListChris PaceyNo ratings yet
- Getting Started With DockerDocument8 pagesGetting Started With DockerdenisaNo ratings yet
- Density and Concentration Transmitter: Installation GuideDocument40 pagesDensity and Concentration Transmitter: Installation GuideOmid GhNo ratings yet
- Pds Maestro Alkyd Primer 12070 En-GbDocument2 pagesPds Maestro Alkyd Primer 12070 En-GbKhyle Laurenz DuroNo ratings yet
- Payment Advice Outward Telegraphic Transfer: DateDocument2 pagesPayment Advice Outward Telegraphic Transfer: DateRomanov DalsheNo ratings yet
- Studyguide PDFDocument97 pagesStudyguide PDFraqibappNo ratings yet
- Theta76PrinterUnit EL V1-0Document58 pagesTheta76PrinterUnit EL V1-0MarcelinoMorillasCecilia100% (1)
- Philips BV Pulsera C ArmsDocument2 pagesPhilips BV Pulsera C ArmsWaheed MidoNo ratings yet
- PDF CatalogEngDocument24 pagesPDF CatalogEngReal Gee MNo ratings yet
- Frequency Control On An Island Power System With Evolving Plant MixDocument221 pagesFrequency Control On An Island Power System With Evolving Plant MixKing KingNo ratings yet
- Udhe 2.standardsDocument1 pageUdhe 2.standardsom dhamnikarNo ratings yet
- 50 Practice Questions With Topics For IELTS Speaking Part 3Document5 pages50 Practice Questions With Topics For IELTS Speaking Part 3Adeel Raza SyedNo ratings yet
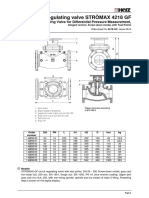
- Circuit Regulating Valve STRÖMAX 4218 GFDocument14 pagesCircuit Regulating Valve STRÖMAX 4218 GFMario Mô Ri ANo ratings yet
- Implementation 3-Axis CNC Router For Small Scale Industry: Telkom Applied Science School, Telkom University, IndonesiaDocument6 pagesImplementation 3-Axis CNC Router For Small Scale Industry: Telkom Applied Science School, Telkom University, IndonesiaAnonymous gzC9adeNo ratings yet
- Realizing Higher Productivity by Implementing Air Drilling Tech For Drilling Hard Top Hole Sections in Vindhyan FieldsDocument7 pagesRealizing Higher Productivity by Implementing Air Drilling Tech For Drilling Hard Top Hole Sections in Vindhyan FieldsLok Bahadur RanaNo ratings yet
- Operaional Manual: YZBF-120LDDocument16 pagesOperaional Manual: YZBF-120LDMohamed AnwarNo ratings yet
- MK7850NDocument6 pagesMK7850NkherrimanNo ratings yet
- PPG en-US P162.OutputDocument4 pagesPPG en-US P162.OutputChemical EngineerNo ratings yet