You might also like
- Pic Assem 2004Document34 pagesPic Assem 2004LuisHdz100% (2)
- Embedded System: From Wikipedia, The Free EncyclopediaDocument12 pagesEmbedded System: From Wikipedia, The Free EncyclopediaAndrei Ursac100% (1)
- Lab2 MotorControl 08Document18 pagesLab2 MotorControl 08ĐạiDương100% (1)
- ManualDocument155 pagesManualJulio Infantes100% (1)
- Integrated Development Environment For STM32 ProductsDocument5 pagesIntegrated Development Environment For STM32 Productsjhon ortiz100% (1)
- Difference Between PIC and AVRDocument8 pagesDifference Between PIC and AVRVinsen Teubun Letsoin100% (1)
- Simple Icom CI-V InterfaceDocument2 pagesSimple Icom CI-V InterfaceMike100% (1)
- Micro Smart ManualDocument455 pagesMicro Smart ManualJuan Carlos100% (1)
- STM32 Configuration and Initialization C Code GenerationDocument7 pagesSTM32 Configuration and Initialization C Code Generationcai100% (1)
- Modbus Embedded Controller: Ndustrial Omputer Roducts Ata Cquisition YstemDocument34 pagesModbus Embedded Controller: Ndustrial Omputer Roducts Ata Cquisition Ystemramesh_br85100% (1)
- PHOENIX - RS232 - 485 To TCPDocument14 pagesPHOENIX - RS232 - 485 To TCPJorge_Andril_5370100% (1)
- Pic 18 1Document2 pagesPic 18 1alpesh100% (1)
- Microchip TCP/IP Lite Stack: Authors: Janaki Kuruganti, Alin Stoicescu, Marius Cristea, Microchip Technology IncDocument30 pagesMicrochip TCP/IP Lite Stack: Authors: Janaki Kuruganti, Alin Stoicescu, Marius Cristea, Microchip Technology IncCarlos Daniel Rodriguez100% (1)
- Unit 1 Architecture of Pic 16cXXDocument41 pagesUnit 1 Architecture of Pic 16cXXKapilachander Thangavel100% (1)
- Newbie's Guide To AVR TimersDocument23 pagesNewbie's Guide To AVR TimersNitish Kumar100% (1)
- MICROCHIPDocument20 pagesMICROCHIPHector David100% (1)
- 1-Basics of MicroprocessorDocument9 pages1-Basics of Microprocessorafzal_a100% (1)
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDocument15 pagesSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSMardan Sabily Hasibuan100% (2)
- 256/128 Kbit Serial I C Bus EEPROM Without Chip Enable LinesDocument16 pages256/128 Kbit Serial I C Bus EEPROM Without Chip Enable LinesRoni Socompi100% (1)
- TC8129CKWDocument17 pagesTC8129CKWVukica Ivic100% (1)
- Exploring PIC 24F Series Microcontroller PDFDocument13 pagesExploring PIC 24F Series Microcontroller PDFErandi Brito100% (1)
- LED ChaserDocument7 pagesLED ChaserMegan Skinner100% (1)
- PIC Programming Module USB and Traffic Light System ControllerDocument26 pagesPIC Programming Module USB and Traffic Light System ControllerJosh, LRT100% (1)
- Choosing The Correct DigipotDocument4 pagesChoosing The Correct Digipottubeman1814100% (1)
- Circuit DiagramDocument10 pagesCircuit DiagramM Rameez Ur Rehman100% (1)
- Unit - Iii MPMC-1Document79 pagesUnit - Iii MPMC-1gunda manasa100% (1)
- 1.3inch OLED UserManualDocument7 pages1.3inch OLED UserManualReV100% (1)
- USB Solutions: Robust USB Portfolio Including Support For USB-C™ and Power DeliveryDocument12 pagesUSB Solutions: Robust USB Portfolio Including Support For USB-C™ and Power DeliveryCasan No100% (1)
- Development Kit For E-Paper Display: Dalian Good Display Co., LTDDocument13 pagesDevelopment Kit For E-Paper Display: Dalian Good Display Co., LTDjhonatan cock100% (1)
- Embedded SystemsDocument27 pagesEmbedded Systemsnavneet100% (1)
- Random Problem in CDocument12 pagesRandom Problem in CRashedulIslamRiyad100% (1)
- Introduction To Embedded SystemsDocument33 pagesIntroduction To Embedded Systemscharanpreetg1100% (1)
- Advanced Microcontrollers: Chapter - 26Document36 pagesAdvanced Microcontrollers: Chapter - 26ramesh_br85100% (1)
- 4 Pin LCDDocument13 pages4 Pin LCDVenkata Konda Reddy Mulle100% (1)
- Hands On With The Microchip TCP/IP Stack (8 Hours)Document102 pagesHands On With The Microchip TCP/IP Stack (8 Hours)Lucia Perez100% (1)
- Pic TCP Ip StackDocument94 pagesPic TCP Ip StackHania Umar100% (1)
- 433aschematic PDFDocument1 page433aschematic PDFCarlos Vasquez100% (1)
- Servo 1Document3 pagesServo 1Jorge Dominguez100% (3)
- Tinytile Product Brief Feb2017Document1 pageTinytile Product Brief Feb2017ajoaomv100% (1)
- Tutorial - How To Use Disk Drive StepperDocument9 pagesTutorial - How To Use Disk Drive StepperLiraJunior100% (1)
- Open Source Frequency Counter DIY Kit 10Hz-250MHzDocument10 pagesOpen Source Frequency Counter DIY Kit 10Hz-250MHzBruno Santos de Miranda100% (1)
- Avr C Timer0 PDFDocument9 pagesAvr C Timer0 PDFNicolás Ferrario100% (1)
- Serial CommunicationsDocument23 pagesSerial CommunicationsPhuoc Trung Tran100% (1)
- GD7965 Spec0fdeDocument76 pagesGD7965 Spec0fdejhonatan cock100% (1)
- Using PICKit™ 3 For MPLAB® X IDEDocument1 pageUsing PICKit™ 3 For MPLAB® X IDEpopoyboy100% (1)
- Wiegand To Rs232 ConverterDocument4 pagesWiegand To Rs232 ConverterTriều Dương100% (1)
- DC Motor Control Using CDocument6 pagesDC Motor Control Using Cankitguptaims100% (2)
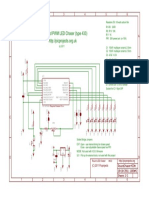
- Pic Maxi Web Tom NguyenDocument9 pagesPic Maxi Web Tom NguyenAnonymous 2lMI3jbZb100% (1)
- DC Motor Control Using C++Document8 pagesDC Motor Control Using C++Atto100% (2)
- LCD Functions For Displays With Up To 2x40 CharactersDocument3 pagesLCD Functions For Displays With Up To 2x40 Charactersdjdoover100% (2)
- Usb RS232Document7 pagesUsb RS232Juan Luis Carr100% (1)
- RS232 Communication Using PIC18F4520 S USART PIC Micro Controller Tutorial Extreme ElectronicsDocument24 pagesRS232 Communication Using PIC18F4520 S USART PIC Micro Controller Tutorial Extreme ElectronicsHectorLopez100% (1)
- C Programming for the PIC Microcontroller: Demystify Coding with Embedded ProgrammingFrom EverandC Programming for the PIC Microcontroller: Demystify Coding with Embedded ProgrammingNo ratings yet
- PIC Projects and Applications using C: A Project-based ApproachFrom EverandPIC Projects and Applications using C: A Project-based ApproachRating: 4 out of 5 stars4/5 (2)
- Intermediate C Programming for the PIC Microcontroller: Simplifying Embedded ProgrammingFrom EverandIntermediate C Programming for the PIC Microcontroller: Simplifying Embedded ProgrammingNo ratings yet
- Lecture Notes: MacroeconomicDocument31 pagesLecture Notes: MacroeconomicHassan Ali KhanNo ratings yet
- Lecture 2Document9 pagesLecture 2Hassan Ali KhanNo ratings yet
- Divisibility Rules For Numbers 1-12Document3 pagesDivisibility Rules For Numbers 1-12Hassan Ali KhanNo ratings yet
- Students Inn Samanabad: Class Ix Chemistry Test Chapter 4 Max Marks: 25/45min Section A (10 Marks) Mcqs Q1Document2 pagesStudents Inn Samanabad: Class Ix Chemistry Test Chapter 4 Max Marks: 25/45min Section A (10 Marks) Mcqs Q1Hassan Ali KhanNo ratings yet
- Processing of Bopp FilmDocument49 pagesProcessing of Bopp FilmHassan Ali Khan75% (8)
- Best Job Searching Ebook & Resource in Dubai UAEDocument5 pagesBest Job Searching Ebook & Resource in Dubai UAEHassan Ali KhanNo ratings yet
- To Whom It May Concern Certificate Format SampleDocument1 pageTo Whom It May Concern Certificate Format SampleAkhil GRNo ratings yet
- Implications of The Globalization of Information Technology: Dr. Catherine L. MannDocument33 pagesImplications of The Globalization of Information Technology: Dr. Catherine L. MannHassan Ali KhanNo ratings yet
- IELTS EbookDocument10 pagesIELTS EbookNagaratna ReddyNo ratings yet
- KCOS Airfield OrientationDocument36 pagesKCOS Airfield OrientationHassan Ali KhanNo ratings yet
- Air Traffic ControlDocument16 pagesAir Traffic ControlHassan Ali Khan100% (1)
- HMS-Wireless Bolt (Manual)Document28 pagesHMS-Wireless Bolt (Manual)Jorge_Andril_5370No ratings yet
- Leonova Diamond TD Sheet 2Document10 pagesLeonova Diamond TD Sheet 2Ahmed Mohamed HassanNo ratings yet
- Catalogue Solar LuckyIndiaDocument43 pagesCatalogue Solar LuckyIndiaSharafat AliNo ratings yet
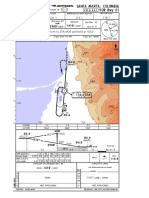
- Santa Marta, Colombia SKSM/SMR VOR Rwy 01: 13-1 119.1 118.7 VOR Cat A, B & C Simon Bolivar Intl 125.0 127.7Document1 pageSanta Marta, Colombia SKSM/SMR VOR Rwy 01: 13-1 119.1 118.7 VOR Cat A, B & C Simon Bolivar Intl 125.0 127.7Guillermo Serrano KelcyNo ratings yet
- Littelfuse SIDACtor DO 214 Datasheet PDFDocument5 pagesLittelfuse SIDACtor DO 214 Datasheet PDFdvalinaNo ratings yet
- Ieee Standard 1016Document3 pagesIeee Standard 1016Juan Carlos Cabrera GudiñoNo ratings yet
- OVL ReferenceDocument222 pagesOVL ReferenceKrishna ParthajeNo ratings yet
- Memory Interfaces Made Easy With Xilinx Fpgas and The Memory Interface GeneratorDocument16 pagesMemory Interfaces Made Easy With Xilinx Fpgas and The Memory Interface GeneratorRamya NedumbalaNo ratings yet
- 2N5320 2N5321 NPN 2N5322 2N5323 PNP Complementary Silicon Switching Transistors DescriptionDocument3 pages2N5320 2N5321 NPN 2N5322 2N5323 PNP Complementary Silicon Switching Transistors Descriptionfabian orozNo ratings yet
- Uk048e New Range LediDocument16 pagesUk048e New Range LediSayed HashemNo ratings yet
- Alternating Current PDFDocument26 pagesAlternating Current PDFMeena SharmaNo ratings yet
- HISIC450 Overheight Detectors: Reliable Overheight Detection of VehiclesDocument8 pagesHISIC450 Overheight Detectors: Reliable Overheight Detection of Vehiclesazer NadingaNo ratings yet
- BK16-EDG-04-001-REV A - Instrument Connection DiagramsDocument3 pagesBK16-EDG-04-001-REV A - Instrument Connection DiagramsNguyen Hong QuyetNo ratings yet
- كورس حمايه ممتعDocument151 pagesكورس حمايه ممتعWhite HeartNo ratings yet
- Diamond Shield Zapper IE: Instruction ManualDocument24 pagesDiamond Shield Zapper IE: Instruction ManualDamir ŠafaričNo ratings yet
- C Pen 3.5 Product SheetDocument1 pageC Pen 3.5 Product Sheetjaggy286No ratings yet
- SerialsDocument7 pagesSerialsapi-3708126No ratings yet
- Storwize V7000 Unified Problem DeterminationDocument334 pagesStorwize V7000 Unified Problem DeterminationyemeralNo ratings yet
- Latch UpDocument4 pagesLatch UpSaurabh MishraNo ratings yet
- Electronic Inclinometer: Danei-300Document2 pagesElectronic Inclinometer: Danei-300insinyurNo ratings yet
- A Novel High-Gain DC-DC Converter Applied in Fuel Cell VehiclesDocument13 pagesA Novel High-Gain DC-DC Converter Applied in Fuel Cell Vehiclesrock starNo ratings yet
- BJT Cross ReferenceDocument7 pagesBJT Cross ReferenceNoel BalugoNo ratings yet
- CDR Questionnaire Form: of The Project I.E. How The Objectives of The Project Was Accomplished in Brief.)Document3 pagesCDR Questionnaire Form: of The Project I.E. How The Objectives of The Project Was Accomplished in Brief.)Uttam AcharyaNo ratings yet
- How Did Bill Gates and Steve Jobs Differ in Their Leadership StyleDocument4 pagesHow Did Bill Gates and Steve Jobs Differ in Their Leadership StyleDip Kumar Dey67% (9)
- Total Station RObotic Topcon GT 501 With Automatic Control - TRANSSURVEYDocument4 pagesTotal Station RObotic Topcon GT 501 With Automatic Control - TRANSSURVEYTRANS SURVEYNo ratings yet
- Final Drawing-R5D2013Document79 pagesFinal Drawing-R5D2013batizap batizapNo ratings yet
- KRF-V4080D KRF-V5580D: Instruction ManualDocument36 pagesKRF-V4080D KRF-V5580D: Instruction ManualCostin DraghiaNo ratings yet
- Laboratory 7Document4 pagesLaboratory 7Priyamdas123No ratings yet
- Ge 9100C NXTDocument4 pagesGe 9100C NXTSolomon YimerNo ratings yet