You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- EZGO Shuttle 6 2010Document2 pagesEZGO Shuttle 6 2010Mohd ZamriNo ratings yet
- Micom P122Document626 pagesMicom P122Raj Sekhar0% (1)
- InfoVista Planet 5G NRDocument32 pagesInfoVista Planet 5G NRDenmark Wilson100% (8)
- Electrical Engineering FormulasDocument4 pagesElectrical Engineering Formulassanjay975No ratings yet
- Electricity Consumption by Sector in Spain from 1992-2012Document3 pagesElectricity Consumption by Sector in Spain from 1992-2012vignes_89No ratings yet
- Electric Vehicle For Traction MotorsDocument12 pagesElectric Vehicle For Traction Motorschetan_harsha_1100% (1)
- 1 PaskaitaDocument49 pages1 Paskaitavignes_89No ratings yet
- Electric Vehicle For Traction MotorsDocument12 pagesElectric Vehicle For Traction Motorschetan_harsha_1100% (1)
- Fuzzy Im1Document6 pagesFuzzy Im1rkt_26No ratings yet
- Sample Report 1Document86 pagesSample Report 1vignes_89No ratings yet
- Chapter 7 - Dielectrics in The Electrostatic FieldDocument21 pagesChapter 7 - Dielectrics in The Electrostatic Fieldvignes_89No ratings yet
- MATLABDocument1 pageMATLABvignes_89No ratings yet
- EasyPact MVS - MVS08N3NF2LDocument3 pagesEasyPact MVS - MVS08N3NF2LsaravananNo ratings yet
- Option M14 IO Extension Card 4 Relay Outputs 4189340682 UKDocument8 pagesOption M14 IO Extension Card 4 Relay Outputs 4189340682 UKAung MhNo ratings yet
- Ecx4233 Tma1 2016Document6 pagesEcx4233 Tma1 2016ParasecNo ratings yet
- Engineering Measurements 2Document3 pagesEngineering Measurements 2KCCNo ratings yet
- Embedded ProjectsDocument10 pagesEmbedded ProjectsMikroc Thupati Srinivs100% (1)
- QuotationDocument2 pagesQuotation92nikhilNo ratings yet
- Battens & Special Purpose1Document6 pagesBattens & Special Purpose1Anonymous MDkp0hnb3lNo ratings yet
- High Power Programmable DC Power Supply: User ManualDocument203 pagesHigh Power Programmable DC Power Supply: User Manualahsen siddiqueNo ratings yet
- Price Miadri Grup 07.02Document158 pagesPrice Miadri Grup 07.02Arteom DobîndăNo ratings yet
- High-Efficiency Pure Sine Wave InverterDocument5 pagesHigh-Efficiency Pure Sine Wave Invertermariojrm74No ratings yet
- Monochrome LedsDocument1 pageMonochrome Ledsy lNo ratings yet
- Comparison GPS GLONASS Galileo PLNRaju2Document38 pagesComparison GPS GLONASS Galileo PLNRaju2Saurabh SumanNo ratings yet
- DFFHMDocument9 pagesDFFHMyaswanthNo ratings yet
- Under The Guidance Of: TH THDocument59 pagesUnder The Guidance Of: TH THSuresh Kumar PNo ratings yet
- RF Integrated Circuits Mid-Term ExamDocument1 pageRF Integrated Circuits Mid-Term Examsreekanth2728No ratings yet
- Hind Rectifiers Limited: Perfectly Engineered Power Conversion SystemsDocument16 pagesHind Rectifiers Limited: Perfectly Engineered Power Conversion SystemsMURALINo ratings yet
- IITH ranked 8th in NIRF Engineering & 10th in ARIIADocument43 pagesIITH ranked 8th in NIRF Engineering & 10th in ARIIAYoo HooNo ratings yet
- Cataract User Guide WebDocument29 pagesCataract User Guide WebSalomonNo ratings yet
- Basics of VFDDocument10 pagesBasics of VFDMubarak BashaNo ratings yet
- DSE157 Installation InstructionsDocument1 pageDSE157 Installation Instructionsaling alingNo ratings yet
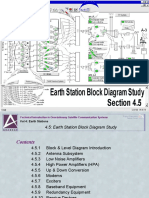
- Earth Station Block Diagram Study: Section 5Document213 pagesEarth Station Block Diagram Study: Section 5Extreme DaysNo ratings yet
- Sony MZ-B50 Service ManualDocument72 pagesSony MZ-B50 Service ManualDavid PiçarraNo ratings yet
- Automatic aeroponic irrigation system based on ArduinoDocument13 pagesAutomatic aeroponic irrigation system based on ArduinoDheeraj ThakurNo ratings yet
- Logarithmic Amplifier: BE o Be Be oDocument1 pageLogarithmic Amplifier: BE o Be Be oJoseGarciaRuizNo ratings yet
- class-AB Voltage Follower2006Document2 pagesclass-AB Voltage Follower2006tuanka1No ratings yet
- Interfacing LED With 8086 PDFDocument9 pagesInterfacing LED With 8086 PDFqnu0750% (6)
- Number System & Logic GatesDocument24 pagesNumber System & Logic GatesA B Shinde100% (7)