You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
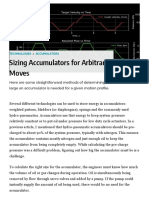
- Sizing Accumulators For Arbitrary Moves - Hydraulics & PneumaticsDocument5 pagesSizing Accumulators For Arbitrary Moves - Hydraulics & Pneumaticsback1949100% (1)
- How Natural Frequency Limits Frequency of Acceleration - Hydraulics & PneumaticsDocument7 pagesHow Natural Frequency Limits Frequency of Acceleration - Hydraulics & Pneumaticsback1949No ratings yet
- EibfiweubfDocument19 pagesEibfiweubfNagesh DewanganNo ratings yet
- Load-Force-Adaptive Outlet Throttling - An Easily CommissionableDocument13 pagesLoad-Force-Adaptive Outlet Throttling - An Easily Commissionableback1949No ratings yet
- Quickstart basic digital proportionals analog commandDocument2 pagesQuickstart basic digital proportionals analog commandback1949No ratings yet
- Nasa 2010 Iest MVFDocument29 pagesNasa 2010 Iest MVFback1949No ratings yet
- B A C D: Quickstart BasicDocument2 pagesB A C D: Quickstart Basicback1949No ratings yet
- Controlling Hydraulic PressureDocument6 pagesControlling Hydraulic Pressureback1949100% (1)
- Compatibility For EMC, Climate and Mechanical LoadDocument4 pagesCompatibility For EMC, Climate and Mechanical Loadback1949No ratings yet
- EibfiweubfDocument19 pagesEibfiweubfNagesh DewanganNo ratings yet
- Electronification of Open Loop HydraulicsDocument39 pagesElectronification of Open Loop Hydraulicsback1949100% (2)
- ACOPOS P3配置解析及配置案例V0.00Document16 pagesACOPOS P3配置解析及配置案例V0.00back1949No ratings yet
- OPC UA TSN - A New Solution For Industrial CommunicationDocument10 pagesOPC UA TSN - A New Solution For Industrial Communicationback1949No ratings yet
- 智能科技改变机床生产格局Document39 pages智能科技改变机床生产格局back1949No ratings yet
- Yuken Newprodguide JC-10010-1Document12 pagesYuken Newprodguide JC-10010-1back1949100% (1)
- US7322375Document13 pagesUS7322375back1949No ratings yet
- Moog ServoValves Techn Look Overview enDocument36 pagesMoog ServoValves Techn Look Overview enGonzalo Gutierrez100% (1)
- CasappaDocument44 pagesCasappaback1949No ratings yet
- Digital Hydraulic Valves Gaining Momentum: Newton, Ma-The Trend Toward De-Centralized Control On The Factory FloorDocument2 pagesDigital Hydraulic Valves Gaining Momentum: Newton, Ma-The Trend Toward De-Centralized Control On The Factory Floorback1949100% (1)
- Industrial Hydraulic ValvesCat HY14 2500 DCVPCVServoElect 12 11Document464 pagesIndustrial Hydraulic ValvesCat HY14 2500 DCVPCVServoElect 12 11back1949100% (1)
- QB300Document2 pagesQB300back1949No ratings yet
- User Manual: M3000 Automation System MSC II (Moog Servo Controller)Document148 pagesUser Manual: M3000 Automation System MSC II (Moog Servo Controller)back1949No ratings yet
- F-35 Air Vehicle Technology Overview PDFDocument28 pagesF-35 Air Vehicle Technology Overview PDFback1949No ratings yet
- Fluid ContaminationDocument4 pagesFluid Contaminationback1949No ratings yet
- Servo Valves TechnicalDocument24 pagesServo Valves Technicalobvert100% (2)
- Vibration Analysis of The Crank-Link Mechanism of Reciprocating Bilge PumpsDocument4 pagesVibration Analysis of The Crank-Link Mechanism of Reciprocating Bilge Pumpsback1949No ratings yet
- 6 Costly Mistakes Most Hydraulics Users Make and How You Can Avoid Them!Document6 pages6 Costly Mistakes Most Hydraulics Users Make and How You Can Avoid Them!back1949No ratings yet
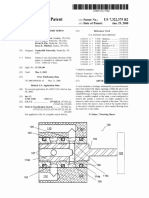
- United States Patent (10) Patent No.: US 6,367,365 B1: Weickert Et Al. (45) Date of Patent: Apr. 9, 2002Document10 pagesUnited States Patent (10) Patent No.: US 6,367,365 B1: Weickert Et Al. (45) Date of Patent: Apr. 9, 2002back1949No ratings yet
- Rexroth and Atos Valve CompareDocument7 pagesRexroth and Atos Valve Compareback1949No ratings yet
- 高速机床跟随误差 PDFDocument7 pages高速机床跟随误差 PDFback1949No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- LR Phono PreampsDocument44 pagesLR Phono PreampsMartin FernandezNo ratings yet
- Answers About HubSpotDocument1 pageAnswers About HubSpotPrasetyaNo ratings yet
- 4c - Expanded - RevisedDocument132 pages4c - Expanded - RevisedMartín Serena75% (4)
- TM4C129XNCZAD MicrocontrollerDocument2,191 pagesTM4C129XNCZAD Microcontrollermamaligosu1No ratings yet
- January 2021 price list for Petro motor oils and diesel engine oilsDocument2 pagesJanuary 2021 price list for Petro motor oils and diesel engine oilsSAFIR ULLAHNo ratings yet
- The Future of Smart Cities and RegionsDocument20 pagesThe Future of Smart Cities and RegionsChristianNo ratings yet
- 21st Bomber Command Tactical Mission Report 146, OcrDocument54 pages21st Bomber Command Tactical Mission Report 146, OcrJapanAirRaidsNo ratings yet
- Cheat SheetDocument50 pagesCheat SheetAnubhav ChaturvediNo ratings yet
- Basic Computer ConceptsDocument77 pagesBasic Computer ConceptsJerry Mugambi100% (1)
- Process Sizing CriteriaDocument91 pagesProcess Sizing CriteriaMohammad BadakhshanNo ratings yet
- Manufacturing Egg Trays from Waste PaperDocument17 pagesManufacturing Egg Trays from Waste Paperravibarora86% (7)
- Digital Logic and Microprocessor Design With Interfacing 2nd Edition Hwang Solutions ManualDocument27 pagesDigital Logic and Microprocessor Design With Interfacing 2nd Edition Hwang Solutions Manualdacdonaldnxv1zq100% (27)
- Kosice Schulze Bramey PDFDocument13 pagesKosice Schulze Bramey PDFandrel_fariasNo ratings yet
- MyPower S3220&S3320-INSTALLATIONDocument83 pagesMyPower S3220&S3320-INSTALLATIONJorge GonzalesNo ratings yet
- DH3E-L-SC-A3-K-170329-0009 Commissioning Inspection & Test Plan (ITP) For BOP and Associated Test FormsDocument2 pagesDH3E-L-SC-A3-K-170329-0009 Commissioning Inspection & Test Plan (ITP) For BOP and Associated Test FormsBình Quách HảiNo ratings yet
- Panama Canal Requirements N10-2018Document11 pagesPanama Canal Requirements N10-2018Anca Geanina100% (1)
- Royal 3KW Solar System: Ref: RSE/SQ/804/2020 Date: 09-28-2020 Sale QuotationDocument3 pagesRoyal 3KW Solar System: Ref: RSE/SQ/804/2020 Date: 09-28-2020 Sale Quotationmuhammad aliNo ratings yet
- DIMENSIONAL TOLERANCES FOR COLD CLOSE RADIUS PIPE BENDINGDocument11 pagesDIMENSIONAL TOLERANCES FOR COLD CLOSE RADIUS PIPE BENDINGpuwarin najaNo ratings yet
- Hughes Brothers PDFDocument52 pagesHughes Brothers PDFJavier MaldonadoNo ratings yet
- IEC Certificate 1000V Single Glass 202304Document35 pagesIEC Certificate 1000V Single Glass 202304Marian ProzorianuNo ratings yet
- Enclosed Product Catalogue 2012Document24 pagesEnclosed Product Catalogue 2012Jon BerryNo ratings yet
- Surface Vortices and Pressures in Suction Intakes of Vertical Axial-Flow PumpsDocument22 pagesSurface Vortices and Pressures in Suction Intakes of Vertical Axial-Flow PumpssauroNo ratings yet
- Designing The Marketing Channels 13Document13 pagesDesigning The Marketing Channels 13Gajender SinghNo ratings yet
- Dsd-060 Earthquake Shutdown Unit: DescriptionDocument2 pagesDsd-060 Earthquake Shutdown Unit: Descriptionmuhammad arifNo ratings yet
- Gsxp07er Opera1tion Manual PDFDocument94 pagesGsxp07er Opera1tion Manual PDFMohamed SaadAllahNo ratings yet
- Difference Between AND: Shahirah Nadhirah Madihah Suhana AtiqahDocument11 pagesDifference Between AND: Shahirah Nadhirah Madihah Suhana AtiqahShahirah ZafirahNo ratings yet
- Oracle Database Question Bank 1Document5 pagesOracle Database Question Bank 1subbaraomca2010No ratings yet
- Services Marketing: Consumer Behavior in Services Unit 2Document78 pagesServices Marketing: Consumer Behavior in Services Unit 2mpsrishaNo ratings yet
- Fire Pump ChecklistDocument11 pagesFire Pump ChecklistLD Jr FrancisNo ratings yet
- DSSSB 01 2017Document9 pagesDSSSB 01 2017Praneeta KatdareNo ratings yet