You might also like
- Sheet Caviation CFD ModellingDocument13 pagesSheet Caviation CFD Modellingapoorvs75No ratings yet
- CFDMSH - Python Module For Meshing of AirfoilDocument132 pagesCFDMSH - Python Module For Meshing of Airfoilapoorvs75No ratings yet
- Computer Graphics - OpenglDocument150 pagesComputer Graphics - Openglapoorvs75No ratings yet
- Moving Boundary Problems For The BGK Model of Rarefied Gas DynamicsDocument3 pagesMoving Boundary Problems For The BGK Model of Rarefied Gas Dynamicsapoorvs75No ratings yet
- Orthogonal Algebraic Elliptic Structured Grid GenerationDocument13 pagesOrthogonal Algebraic Elliptic Structured Grid Generationapoorvs75No ratings yet
- Collocated FVMDocument17 pagesCollocated FVMapoorvs75No ratings yet
- Elementary Cascade TheoryDocument3 pagesElementary Cascade Theoryapoorvs75100% (1)
- Low Pressure Turbine Blade DesignDocument10 pagesLow Pressure Turbine Blade Designapoorvs75No ratings yet
- Potential FlowDocument27 pagesPotential Flowapoorvs75No ratings yet
- High Lift LPT DesignDocument10 pagesHigh Lift LPT Designapoorvs75No ratings yet
- AIAA 2013 2567 CharestDocument21 pagesAIAA 2013 2567 Charestapoorvs75No ratings yet
- Counter Rotating FanDocument10 pagesCounter Rotating Fanapoorvs75No ratings yet
- NASA Stage 53 Design ReportDocument109 pagesNASA Stage 53 Design Reportapoorvs75No ratings yet
- Report - Simple Collocated Incompressible FlowDocument115 pagesReport - Simple Collocated Incompressible Flowapoorvs75No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Me2121 2Document12 pagesMe2121 2Wei QuanNo ratings yet
- Solve Schrödinger Equation For Hydrogen Atom - + ExampleDocument10 pagesSolve Schrödinger Equation For Hydrogen Atom - + ExampleperedexNo ratings yet
- Calculate and Selection Result AmperaDocument11 pagesCalculate and Selection Result AmperaSaid AnwarNo ratings yet
- ALLEN - NCERT Based Objective - Physics - Question BankDocument144 pagesALLEN - NCERT Based Objective - Physics - Question Banksamsuzzaman sahin100% (1)
- Study of The Degradation Mechanisms of Polyethylene During ReprocessingDocument9 pagesStudy of The Degradation Mechanisms of Polyethylene During ReprocessingJoselyn GaliciaNo ratings yet
- 2 3 - Earth-ScienceDocument77 pages2 3 - Earth-ScienceVu Thanh Loan (FE FPTU HN)No ratings yet
- Airbase 753Document8 pagesAirbase 753Jagdish PatelNo ratings yet
- HeatDocument27 pagesHeatShobabNo ratings yet
- r20 - Me - II Year SyllabusDocument43 pagesr20 - Me - II Year Syllabusdurga Prasad amuduriNo ratings yet
- Lab Manual Ebt 251Document29 pagesLab Manual Ebt 251Ahmad Helmi AdnanNo ratings yet
- Lesson Notes About SoundsDocument6 pagesLesson Notes About Soundsmark joseph cometaNo ratings yet
- Automated Coiled Tubing Integrity Monitoring (ACIM) : TechnologyDocument4 pagesAutomated Coiled Tubing Integrity Monitoring (ACIM) : TechnologyArgonauta_navegadorNo ratings yet
- Stiffness Modifiers For Walls ETABSDocument3 pagesStiffness Modifiers For Walls ETABSHiren DesaiNo ratings yet
- List of Textile Universities in USADocument3 pagesList of Textile Universities in USAFazle RubbiNo ratings yet
- Chapter 1 Introduction To Structural Analysis and LoadsDocument24 pagesChapter 1 Introduction To Structural Analysis and LoadsMarissa BrownNo ratings yet
- MOD09 UserGuide v1 3Document40 pagesMOD09 UserGuide v1 3Argemiro Lucena AraujoNo ratings yet
- BachoduDocument175 pagesBachoduShubham KothariNo ratings yet
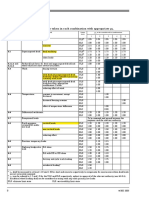
- Table 1 - Loads To Be Taken in Each Combination With AppropriateDocument2 pagesTable 1 - Loads To Be Taken in Each Combination With AppropriateAdi HamdaniNo ratings yet
- Calcium CarbonateDocument116 pagesCalcium CarbonatemichaelNo ratings yet
- Organic Chemistry - Chapter 15 Benzene & Aromatic CompoundsDocument9 pagesOrganic Chemistry - Chapter 15 Benzene & Aromatic CompoundsSairille ManejaNo ratings yet
- X-Ray DiffractionDocument26 pagesX-Ray DiffractionZain Ali KidwaiNo ratings yet
- Irregularities in Building ConfigurationDocument15 pagesIrregularities in Building ConfigurationHannah MrudulynNo ratings yet
- The Physics of Superfluid Helium: W. F. VinenDocument12 pagesThe Physics of Superfluid Helium: W. F. VinenPaulo CesarNo ratings yet
- Fixed Bed ReactorDocument43 pagesFixed Bed ReactorMaher Al-busaidi100% (2)
- Acoustic SensorsDocument7 pagesAcoustic SensorsNihal AhmadNo ratings yet
- Assessing Reflected Sunlight From Building Facades A Literature Review and Proposed CriteriaDocument10 pagesAssessing Reflected Sunlight From Building Facades A Literature Review and Proposed Criteriakarol50% (2)
- Renderoc SMDocument2 pagesRenderoc SMMas DaffiNo ratings yet
- TurbochargerDocument8 pagesTurbochargersudheeshNo ratings yet
- Refrigerant Recovery System 3600Document20 pagesRefrigerant Recovery System 3600lorenzoNo ratings yet
- TextDocument6 pagesTextRisyane Yoandira AgnesaNo ratings yet