You might also like
- Sensores de Flujo PDFDocument109 pagesSensores de Flujo PDFmatrix1xNo ratings yet
- Practica 2Document23 pagesPractica 2Martha Lozada NavarroNo ratings yet
- Ejemplo CorreasDocument13 pagesEjemplo CorreasHugo HacheNo ratings yet
- UNIDAD 1 Impacto de La TribologiaDocument50 pagesUNIDAD 1 Impacto de La TribologiaGarrido Mendez Cesar0% (1)
- Tarea S9 ESTEFANYDocument2 pagesTarea S9 ESTEFANYlalvarezp18032011100% (24)
- Caso 4. Erika ChavesDocument5 pagesCaso 4. Erika ChavesEricka Chaves GallowayNo ratings yet
- Sistemas de Control ElectroneumaticosDocument8 pagesSistemas de Control ElectroneumaticosJesus Alberto BarreraNo ratings yet
- Sintonizacion de ControladoresDocument25 pagesSintonizacion de ControladoresJuankSalazarNo ratings yet
- Control IIDocument124 pagesControl IIMILTON CABRERANo ratings yet
- Fuente Regulada de Voltaje de Fase NegativaDocument18 pagesFuente Regulada de Voltaje de Fase NegativaPaola Carolina Jordán FigueroaNo ratings yet
- Trabajo Control IDocument31 pagesTrabajo Control IjanetNo ratings yet
- Sintonía Manual y Sintonía AdaptivaDocument18 pagesSintonía Manual y Sintonía AdaptivaArturo TapiaNo ratings yet
- Valve EsfericDocument28 pagesValve EsfericEVCY0% (1)
- Metodos Identificacion Dinamica Matlab CodeDocument112 pagesMetodos Identificacion Dinamica Matlab CodeJhonatan Camacho NavarroNo ratings yet
- Laboratorio Control Velocidad Motor DC 2Document8 pagesLaboratorio Control Velocidad Motor DC 2carlosquinteNo ratings yet
- Método de Ziegler-NicholsDocument4 pagesMétodo de Ziegler-NicholsDavid Iván Rosales Soto100% (1)
- Diseño de Motor AlternativoDocument41 pagesDiseño de Motor AlternativoJose Luis Garcia FloresNo ratings yet
- CAP - Sistemas de Primer OrdenDocument37 pagesCAP - Sistemas de Primer OrdenAnonymous HdENZfRNo ratings yet
- Electronica de Potencia 1Document17 pagesElectronica de Potencia 1Igy MoránNo ratings yet
- Cuestionario Ingeniería de Control Moderna (Katsuhiko Ogata)Document5 pagesCuestionario Ingeniería de Control Moderna (Katsuhiko Ogata)DIEGO OSVALDO OCAMPO RODRIGUEZNo ratings yet
- Disparo Lineal de TiristoresDocument13 pagesDisparo Lineal de TiristoresRaul CarrilloNo ratings yet
- Eolica 2018U1 1 ANEMOMETROSDocument36 pagesEolica 2018U1 1 ANEMOMETROSsuckerNo ratings yet
- Sintonización de Controladores PIDDocument13 pagesSintonización de Controladores PIDvadmanhNo ratings yet
- Arrancadores de Motores A Plena TensiónDocument6 pagesArrancadores de Motores A Plena TensiónAquiles VergaraNo ratings yet
- Ejercicios 6Document81 pagesEjercicios 6Fabricio SanchezNo ratings yet
- Capitulo 4 Medicion Del FlujoDocument41 pagesCapitulo 4 Medicion Del FlujoFredy Junior Mamani SantosNo ratings yet
- 3-AnalisisCinematico-Velocidad PPT PpsDocument29 pages3-AnalisisCinematico-Velocidad PPT PpsPepe El Toro SanchezNo ratings yet
- Que Es El Costo Nivelado de Energia LCOE PDFDocument46 pagesQue Es El Costo Nivelado de Energia LCOE PDFNelson Alejandro MeloNo ratings yet
- Control DiscretoDocument47 pagesControl DiscretoCristobal Orlando Valenzuela RiosNo ratings yet
- Cap I. Medición y Error PDFDocument51 pagesCap I. Medición y Error PDFWilsonJersonNo ratings yet
- Metodos de SintonizacionDocument14 pagesMetodos de Sintonizacionejprieto100% (1)
- Control Por Realimentacion de Motor DC PDFDocument5 pagesControl Por Realimentacion de Motor DC PDFJairo SantistebanNo ratings yet
- El Acelerometro Una Puerta A Otros Avances Tecnologicos y Su Aplicacion en La Ingenieria Civil20200712-20182-1xqy11k-With-Cover-Page-V2Document7 pagesEl Acelerometro Una Puerta A Otros Avances Tecnologicos y Su Aplicacion en La Ingenieria Civil20200712-20182-1xqy11k-With-Cover-Page-V2Génesis ReyesNo ratings yet
- Circuito RL Sin FuenteDocument4 pagesCircuito RL Sin FuenteLuis DanielNo ratings yet
- Amplificador Colector ComúnDocument16 pagesAmplificador Colector ComúnJeseniaQuispeNo ratings yet
- Lugar Geométrico de Las RaícesDocument10 pagesLugar Geométrico de Las Raícesjuancampos45No ratings yet
- Velocidad Específica - I 2019Document16 pagesVelocidad Específica - I 2019Gustavo GutiérrezNo ratings yet
- Ejemplos de BondGraphDocument69 pagesEjemplos de BondGraphDavid BandaNo ratings yet
- Modelado Matemático de Sistemas Mecánicos y EléctricosDocument24 pagesModelado Matemático de Sistemas Mecánicos y EléctricosYsabel PumaNo ratings yet
- Métodos de Sintonización en Lazo CerradoDocument12 pagesMétodos de Sintonización en Lazo CerradoloFreDDNo ratings yet
- DISEÑO de Controladores Realimentados Por Ubicacion de Polos y Ceros y Calculo de ObservadoresDocument31 pagesDISEÑO de Controladores Realimentados Por Ubicacion de Polos y Ceros y Calculo de ObservadoresSamuel Limas MoralesNo ratings yet
- Metodo Del Lugar de Las RaicesDocument11 pagesMetodo Del Lugar de Las RaicesDeimond CanoNo ratings yet
- Proyecto Control Pendulo SimpleDocument20 pagesProyecto Control Pendulo SimpleMiguel bonillaNo ratings yet
- MicrocontroladoresDocument24 pagesMicrocontroladoresLuisitoNo ratings yet
- Calculo de Tierras para Lineas Por Medio de VarillasDocument11 pagesCalculo de Tierras para Lineas Por Medio de VarillasInstalaciones Eléctricas ResidencialesNo ratings yet
- Modelado Matemático de Los Sistemas DinámicosDocument10 pagesModelado Matemático de Los Sistemas DinámicosRMZC123No ratings yet
- Diagrama de Bloques - Función de TransferenciaDocument6 pagesDiagrama de Bloques - Función de TransferenciaCristofer fernandez soteloNo ratings yet
- Presentacion de Cinematica de MaquinasDocument32 pagesPresentacion de Cinematica de MaquinasJoel FloresNo ratings yet
- Levitador - Neumático PruebaDocument7 pagesLevitador - Neumático PruebaManotoa Jordan AlexNo ratings yet
- Reactor CSTRDocument27 pagesReactor CSTRDavid Alejandro Gómez Mejía100% (2)
- Observador de Estados para Un Motor DCDocument9 pagesObservador de Estados para Un Motor DCJoseph Manuel Chamochumbi IndaraNo ratings yet
- Documento Completo Maquinas SincronasDocument41 pagesDocumento Completo Maquinas SincronasMike Morales0% (1)
- Control de Motores ElectricosDocument82 pagesControl de Motores ElectricosManuel López MirandaNo ratings yet
- E R - Y-CompensadoresDocument68 pagesE R - Y-Compensadoressantiago pablo albertoNo ratings yet
- Funcion de Trasferencia de Un Circuito RLCDocument4 pagesFuncion de Trasferencia de Un Circuito RLCaldair huarcaya100% (1)
- Aplicación de Los Métodos Numéricos Al Sistema de Control Digital en Tiempo DiscretoDocument8 pagesAplicación de Los Métodos Numéricos Al Sistema de Control Digital en Tiempo DiscretoCesar LeonNo ratings yet
- Fase 1 - Lucas TorresDocument11 pagesFase 1 - Lucas TorresLucas Felipe Torres RojasNo ratings yet
- Practica 8 (Informe)Document15 pagesPractica 8 (Informe)JuanAldairRiveraDueñasNo ratings yet
- Practica 1a Uso de Matlab en Control2013-1Document14 pagesPractica 1a Uso de Matlab en Control2013-1Ricardo Luis Villanueva RamosNo ratings yet
- Control 2 - SintonizacionDocument12 pagesControl 2 - SintonizacionAdrian Leonardo GarciaNo ratings yet
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoFrom EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoRating: 5 out of 5 stars5/5 (1)
- Evidencia-2-Instalacion y Prueba FuncionalDocument11 pagesEvidencia-2-Instalacion y Prueba Funcionaldiego collazosNo ratings yet
- Clase 1 CURSO - Infancias y PantallasDocument24 pagesClase 1 CURSO - Infancias y PantallasAnalia AniNo ratings yet
- Laboratorio N - 2 PbiDocument2 pagesLaboratorio N - 2 PbiJavier ChiclayoNo ratings yet
- Manual Servicio Cirugia InfantilDocument28 pagesManual Servicio Cirugia InfantilSebastian Alexander Orellana CartesNo ratings yet
- Benchmarking Sobre Las Estrategias y Tácticas Exitosas para La Toma de Decisiones ACTIVIDAD 2Document13 pagesBenchmarking Sobre Las Estrategias y Tácticas Exitosas para La Toma de Decisiones ACTIVIDAD 2Marcela Ceballos100% (1)
- Evaluacion Nº02 SeguridadDocument5 pagesEvaluacion Nº02 SeguridadWalter Prado AchahueNo ratings yet
- Triptico Principales Riesgos y Amenazas en Internet y RRSSDocument2 pagesTriptico Principales Riesgos y Amenazas en Internet y RRSSLiliana Sanchez MendezNo ratings yet
- 4.3. Analisis de Costos UnitariosDocument3 pages4.3. Analisis de Costos UnitariosBrayan Motta RodríguezNo ratings yet
- INSTRUCTIVO No. 005Document39 pagesINSTRUCTIVO No. 005Isaac PizarroNo ratings yet
- Instructivo de Memoria Tecnica de Pasantias o Practicas Pre-ProfesionalesDocument10 pagesInstructivo de Memoria Tecnica de Pasantias o Practicas Pre-ProfesionalesAlfredo TenelemaNo ratings yet
- Certificado de Nacido Vivo Antecedente para El Registro CivilDocument1 pageCertificado de Nacido Vivo Antecedente para El Registro CivilISABELLA ESTUDIOSNo ratings yet
- Meza, Maria Belen. Ni Pan Ni Techo Ni Abrigo.Document161 pagesMeza, Maria Belen. Ni Pan Ni Techo Ni Abrigo.Daniel CordovaNo ratings yet
- PSC - Peso de Los Segmentos CorporalesDocument7 pagesPSC - Peso de Los Segmentos CorporalesGENESIS QUINGA PACHERRENo ratings yet
- Mejoramiento Agronomico de Vertisoles en MexicoDocument10 pagesMejoramiento Agronomico de Vertisoles en MexicoJeanpool Barreto FNo ratings yet
- El Siglo de La Biotecnología y Su Capital Humano PDFDocument2 pagesEl Siglo de La Biotecnología y Su Capital Humano PDFLaura cristina Toro rinc�nNo ratings yet
- Tres Componentes de GobernabilidadDocument2 pagesTres Componentes de Gobernabilidadedwar salgadoNo ratings yet
- CTTO PF ESR ServiciosDocument4 pagesCTTO PF ESR ServiciosDaniel Tudela HigueraNo ratings yet
- Sintesis CurricularDocument3 pagesSintesis CurricularAna PetitNo ratings yet
- Anexo 5 - Matriz 1 - Analisis de Riesgos - 219017 - 2Document260 pagesAnexo 5 - Matriz 1 - Analisis de Riesgos - 219017 - 2Talento Humano Educación SantanderNo ratings yet
- Programa de Seguridad Vial Hse Si PR 002Document27 pagesPrograma de Seguridad Vial Hse Si PR 002Sairita OrtizNo ratings yet
- Wilo Bombas MultietDocument55 pagesWilo Bombas MultietelverNo ratings yet
- Diagnostico Cuenca 4Document283 pagesDiagnostico Cuenca 4Diego fernando Guerrero perezNo ratings yet
- Sesion 7 Diag Hombre Maquina VDC MejoDocument79 pagesSesion 7 Diag Hombre Maquina VDC MejoJulio Terrones0% (2)
- Ralon, Gonzalo y Miguel, Agustina. Entre La Inseguridad y La Vulnerabilidad Los Aportes de La Sociologia de R. CastelDocument7 pagesRalon, Gonzalo y Miguel, Agustina. Entre La Inseguridad y La Vulnerabilidad Los Aportes de La Sociologia de R. CastelCaro MartinezNo ratings yet
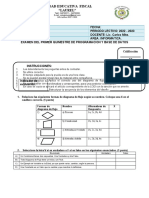
- Examen Quimestral de Programacion y Base de DatosDocument3 pagesExamen Quimestral de Programacion y Base de DatosCharlie MiteNo ratings yet
- Auto Ingles para El TurismoDocument32 pagesAuto Ingles para El TurismoSalma AndreaNo ratings yet
- Texto de TopografiaDocument175 pagesTexto de TopografiaJoel Abdel Bravo Pereira100% (1)
- Protocolo DM-LT-09 MEDIOS ISOTERMOS (ESTUFA)Document8 pagesProtocolo DM-LT-09 MEDIOS ISOTERMOS (ESTUFA)Eric MazaNo ratings yet