You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Sonoace R7Document14 pagesSonoace R7Timberevilake HardjosantosoNo ratings yet
- V7 Catalog v1.0 GI 0527Document12 pagesV7 Catalog v1.0 GI 0527Timberevilake HardjosantosoNo ratings yet
- Presentasi SONOACE R7 EchoDocument19 pagesPresentasi SONOACE R7 EchoTimberevilake HardjosantosoNo ratings yet
- Product Siemens EcatalogDocument35 pagesProduct Siemens EcatalogTimberevilake HardjosantosoNo ratings yet
- An Overview - Artificial Eye (Bionic Eye) : K. Pradeep, K. Vasantha Kokilam and C. SunithaDocument4 pagesAn Overview - Artificial Eye (Bionic Eye) : K. Pradeep, K. Vasantha Kokilam and C. SunithaTimberevilake HardjosantosoNo ratings yet
- Spesifikasi Mammomat SelectDocument1 pageSpesifikasi Mammomat SelectTimberevilake HardjosantosoNo ratings yet
- Contoh Lamaran Kerja SpontanDocument2 pagesContoh Lamaran Kerja SpontanTimberevilake Hardjosantoso100% (1)
- Stock CodeDocument17 pagesStock CodeTimberevilake HardjosantosoNo ratings yet
- Contoh Cover LetterDocument2 pagesContoh Cover LetterTimberevilake HardjosantosoNo ratings yet
- Revina Amandha Juneke Sasmita: Subject: Project Manager VacancyDocument1 pageRevina Amandha Juneke Sasmita: Subject: Project Manager VacancyTimberevilake HardjosantosoNo ratings yet
- Physiologic Control of Rotary Blood Pumps An In.1Document7 pagesPhysiologic Control of Rotary Blood Pumps An In.1Timberevilake HardjosantosoNo ratings yet
- Jojoba ProductDocument1 pageJojoba ProductTimberevilake HardjosantosoNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Section 80CCD (1B) Deduction - About NPS Scheme & Tax BenefitsDocument7 pagesSection 80CCD (1B) Deduction - About NPS Scheme & Tax BenefitsP B ChaudharyNo ratings yet
- Public Conveyances: Environments in Public and Enclosed Places"Document1 pagePublic Conveyances: Environments in Public and Enclosed Places"Jesse Joe LagonNo ratings yet
- Aakanksha ProjectDocument32 pagesAakanksha ProjectAakash murarkaNo ratings yet
- Essay Type ExaminationDocument11 pagesEssay Type ExaminationValarmathi83% (6)
- Đề ANH chuyên 5Document7 pagesĐề ANH chuyên 5Phạm Ngô Hiền MaiNo ratings yet
- MPERSDocument1 pageMPERSKen ChiaNo ratings yet
- Team SportsDocument143 pagesTeam SportsYashNo ratings yet
- Glycolysis Krebscycle Practice Questions SCDocument2 pagesGlycolysis Krebscycle Practice Questions SCapi-323720899No ratings yet
- Borelog CP.101Document1 pageBorelog CP.101radixkusumaNo ratings yet
- Schindler 3100: Cost-Effective MRL Traction Elevator For Two-And Three-Story BuildingsDocument20 pagesSchindler 3100: Cost-Effective MRL Traction Elevator For Two-And Three-Story BuildingsHakim BgNo ratings yet
- General Session Two - Work Life BalanceDocument35 pagesGeneral Session Two - Work Life BalanceHiba AfandiNo ratings yet
- Lesson Plan PPEDocument3 pagesLesson Plan PPEErika Jean Moyo ManzanillaNo ratings yet
- Improving The Livelihoods of Smallholder Fruit Farmers in Soroti District, Teso Sub Region, Eastern Uganda RegionDocument2 pagesImproving The Livelihoods of Smallholder Fruit Farmers in Soroti District, Teso Sub Region, Eastern Uganda RegionPatricia AngatoNo ratings yet
- 2021 Life Skills ATP Grade 5Document10 pages2021 Life Skills ATP Grade 5Koketso SekwenyaneNo ratings yet
- Faraz Chem ProjectDocument13 pagesFaraz Chem ProjectFaraz AhmedNo ratings yet
- BKM 10e Ch07 Two Security ModelDocument2 pagesBKM 10e Ch07 Two Security ModelJoe IammarinoNo ratings yet
- DeMeo HERETIC'S NOTEBOOK: Emotions, Protocells, Ether-Drift and Cosmic Life Energy: With New Research Supporting Wilhelm ReichDocument6 pagesDeMeo HERETIC'S NOTEBOOK: Emotions, Protocells, Ether-Drift and Cosmic Life Energy: With New Research Supporting Wilhelm ReichOrgone Biophysical Research Lab50% (2)
- Resume Massage Therapist NtewDocument2 pagesResume Massage Therapist NtewPartheebanNo ratings yet
- Emission Estimation Technique Manual: For Mining and Processing of Non-Metallic MineralsDocument84 pagesEmission Estimation Technique Manual: For Mining and Processing of Non-Metallic MineralsAbdelaziem mahmoud abdelaalNo ratings yet
- Grand Hyatt Manila In-Room Dining MenuDocument14 pagesGrand Hyatt Manila In-Room Dining MenuMetroStaycation100% (1)
- Debunking The Evergreening Patents MythDocument3 pagesDebunking The Evergreening Patents Mythjns198No ratings yet
- 4 StartUp GuideDocument2 pages4 StartUp GuideSamuel RomeroNo ratings yet
- Carolyn Green Release FinalDocument3 pagesCarolyn Green Release FinalAlex MilesNo ratings yet
- Campus Sexual Violence - Statistics - RAINNDocument6 pagesCampus Sexual Violence - Statistics - RAINNJulisa FernandezNo ratings yet
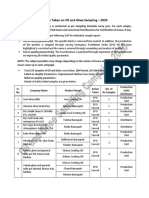
- Action Taken On Oil and Ghee Sampling - 2020Document2 pagesAction Taken On Oil and Ghee Sampling - 2020Khalil BhattiNo ratings yet
- Gay Costa Del Sol - 2010Document2 pagesGay Costa Del Sol - 2010gayinfospainNo ratings yet
- Safety Tips in Playing ArnisDocument2 pagesSafety Tips in Playing ArnisDensyo De MensyoNo ratings yet
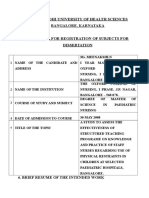
- Rajivgandhi University of Health Sciences Bangalore, KarnatakaDocument19 pagesRajivgandhi University of Health Sciences Bangalore, KarnatakaHUSSAINA BANONo ratings yet
- 4EVC800802-LFEN DCwallbox 5 19Document2 pages4EVC800802-LFEN DCwallbox 5 19michael esoNo ratings yet