You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Department of English and American Studies English Language and LiteratureDocument43 pagesDepartment of English and American Studies English Language and LiteratureSorica DianaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Rot Dynamics PG 1-2Document4 pagesRot Dynamics PG 1-2Nicolas Patrick OntiverosNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Article On PlutoDocument3 pagesArticle On Plutoapi-407250757No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Flat Earth Koran 02 of 13 - The Flat EarthDocument116 pagesFlat Earth Koran 02 of 13 - The Flat EarthDoctor Jones82% (11)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Keplers LawDocument2 pagesKeplers LawDaniela EdilloNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Recent Articles by Nadia DrakeDocument1 pageRecent Articles by Nadia DrakeDanielairon ManinangNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Charles Gilchrist Mandalas - Esoteric AstrologyDocument17 pagesCharles Gilchrist Mandalas - Esoteric AstrologyBruno GonçalvesNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Discrete StructuresDocument317 pagesDiscrete Structureskshitizjain07No ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Chapter 19 Angular MomentumDocument29 pagesChapter 19 Angular Momentumgokcen87No ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Dhan Yogas According To The AscendentDocument1 pageDhan Yogas According To The AscendentSriNo ratings yet
- Know Your 1st House - Upcoming BookDocument4 pagesKnow Your 1st House - Upcoming BookvishalNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Unit 2 Section 2.1 Earth Inside and OutDocument5 pagesUnit 2 Section 2.1 Earth Inside and OutMercedes Muñoz GarcíaNo ratings yet
- A History of WatchesDocument270 pagesA History of WatchesternpflNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Ak & KKDocument2 pagesAk & KKa1n2u3s4h5a6No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Significant Digits & Error AnalysisDocument5 pagesSignificant Digits & Error AnalysiswintheNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Edexcel M1 REVISION!Document10 pagesEdexcel M1 REVISION!AlexanderBrazdaLorente100% (1)
- Exp9-Determination The Dispersive Power of PrismDocument4 pagesExp9-Determination The Dispersive Power of PrismlachychartsNo ratings yet
- 2014 Leo Horoscope - Leo 2014 - Simha Horoscope 2014Document5 pages2014 Leo Horoscope - Leo 2014 - Simha Horoscope 2014ethcalhacker1983No ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Jyotish - Indian Astrology - Collection of Articles - Sreenadh OGDocument195 pagesJyotish - Indian Astrology - Collection of Articles - Sreenadh OGParameshwaran Shanmugasundharam80% (5)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Jain Public School 14Document6 pagesJain Public School 14AnilGoyalNo ratings yet
- AP Physics Uniformly Accelerated Motion LabDocument2 pagesAP Physics Uniformly Accelerated Motion LabinfofluffNo ratings yet
- AristotleDocument1 pageAristotlemastermaster10No ratings yet
- Ketu in 12th HousesDocument10 pagesKetu in 12th HousesSanket MishraNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Astro 13-15Document7 pagesAstro 13-15Celeste EspinaNo ratings yet
- ExtractsPrashna MargaDocument24 pagesExtractsPrashna Margamathurastro6645No ratings yet
- Geokimia: Bumi & SemestaDocument33 pagesGeokimia: Bumi & SemestaAgra GhaziaNo ratings yet
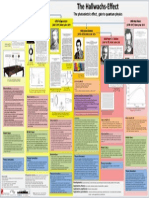
- Hallwachs - Poster-A4-EnDocument1 pageHallwachs - Poster-A4-Enapi-281473337No ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Manglik Dosha - Myths, Fact, Ill Effects and RemediesDocument4 pagesManglik Dosha - Myths, Fact, Ill Effects and Remediesashim_scribdNo ratings yet
- Dynamics Tutorial 10-Natural Vibrations-One Degree of Freedom-27p PDFDocument31 pagesDynamics Tutorial 10-Natural Vibrations-One Degree of Freedom-27p PDFmanfredm6435No ratings yet
- Jacques Derrida: A Biography: Powell, JasonDocument4 pagesJacques Derrida: A Biography: Powell, JasonEmmanuelNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)