You might also like
- Spring Design HandbookDocument199 pagesSpring Design Handbooklakshmanakumarr97% (31)
- Staad Pro PresentationDocument42 pagesStaad Pro PresentationPon Thennarasan100% (2)
- Design of Steel Structures: Materials, Connections, and ComponentsFrom EverandDesign of Steel Structures: Materials, Connections, and ComponentsNo ratings yet
- GRAPHICAL LINKAGE SYNTHESISDocument105 pagesGRAPHICAL LINKAGE SYNTHESISVishal PawarNo ratings yet
- Trestles Design 1Document10 pagesTrestles Design 1Anonymous sfkedkymNo ratings yet
- 03 KinematicsHertzFlexures SullivanDocument50 pages03 KinematicsHertzFlexures SullivanSubhash AhujaNo ratings yet
- Machine Design Databook, Second Edition: Abstract: This Book Provides The Formulas and Data You Need To Solve Even TheDocument7 pagesMachine Design Databook, Second Edition: Abstract: This Book Provides The Formulas and Data You Need To Solve Even TheMichael AngeloNo ratings yet
- Introduction Only) (Compatibility Mode)Document50 pagesIntroduction Only) (Compatibility Mode)Akshar PatelNo ratings yet
- The Application of Flexible Couplings For TurbomachineryDocument24 pagesThe Application of Flexible Couplings For TurbomachineryShilton SoaresNo ratings yet
- Analysis and Design of Plate Girder BridgesDocument58 pagesAnalysis and Design of Plate Girder Bridgesadnan-651358No ratings yet
- Industrial Building (Plate Girder)Document58 pagesIndustrial Building (Plate Girder)adnan-651358100% (1)
- ND ND RD RD TH TH THDocument50 pagesND ND RD RD TH TH THsweet2shineNo ratings yet
- What Are The Differences in High Performance Flexible Couplings For Turbomachinery?Document0 pagesWhat Are The Differences in High Performance Flexible Couplings For Turbomachinery?Michaelben MichaelbenNo ratings yet
- Lecture 1 PDFDocument56 pagesLecture 1 PDFonkod1No ratings yet
- Plate Girder Analysis and Design ProjectDocument59 pagesPlate Girder Analysis and Design Projectadnan-651358100% (1)
- Design and Analysis of Modular Fixture For Machine Vice: January 2018Document7 pagesDesign and Analysis of Modular Fixture For Machine Vice: January 2018temesgen jenberNo ratings yet
- STAAD or (STAAD - Pro) Is A: Structural AnalysisDocument23 pagesSTAAD or (STAAD - Pro) Is A: Structural AnalysisMurari GourNo ratings yet
- Analysis and Design of Mono-Rail Plate Girder Bridge - 2023Document67 pagesAnalysis and Design of Mono-Rail Plate Girder Bridge - 2023adnan-651358No ratings yet
- 5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemDocument14 pages5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemImpact JournalsNo ratings yet
- Modeling & FEA of Universal Coupling of An Automobile TruckDocument12 pagesModeling & FEA of Universal Coupling of An Automobile TruckIJIRSTNo ratings yet
- Practical Application of Finite Element Analysis To The Design of Post-Tensioned and Reinforced Concrete FloorsDocument104 pagesPractical Application of Finite Element Analysis To The Design of Post-Tensioned and Reinforced Concrete FloorsSalam FaithNo ratings yet
- AREMA Committee 5 Presentation On Elastic FastenersDocument26 pagesAREMA Committee 5 Presentation On Elastic FastenersvasilsevNo ratings yet
- 1 s2.0 S2215098616304001 Main PDFDocument13 pages1 s2.0 S2215098616304001 Main PDFBryan GarciaNo ratings yet
- 4281 - 03 Stiffened Shear WebDocument26 pages4281 - 03 Stiffened Shear WebAndrew GilbrideNo ratings yet
- Design and Manufacturing of Sheet Metal Parts: Using Features To Aid Process Planning and Resolve Manufactuability ProblemsDocument34 pagesDesign and Manufacturing of Sheet Metal Parts: Using Features To Aid Process Planning and Resolve Manufactuability ProblemsMohsin AliNo ratings yet
- Design and Analysis of Bolted Joints DABJ Course Book Feb2022Document490 pagesDesign and Analysis of Bolted Joints DABJ Course Book Feb2022josecamposx24No ratings yet
- Design and Manufacturing of Machine ElementsDocument2 pagesDesign and Manufacturing of Machine ElementsAkash SoniNo ratings yet
- Roboclimber: MCL211 Design of Machines Final SubmissionDocument33 pagesRoboclimber: MCL211 Design of Machines Final SubmissionNavneet GoyalNo ratings yet
- Design Parameters in STAADDocument50 pagesDesign Parameters in STAADHussain Mir92% (12)
- Analysis of Double Howe Steel Truss & Cantilever Truss Using Ansys SoftwareDocument6 pagesAnalysis of Double Howe Steel Truss & Cantilever Truss Using Ansys SoftwareSRINIVAS DNo ratings yet
- 1.1 Introduction of Chassis FrameDocument53 pages1.1 Introduction of Chassis FramegadhireddyNo ratings yet
- Design and Strength Analysis Methods of The TrochoidalDocument15 pagesDesign and Strength Analysis Methods of The TrochoidalAlejandro ChavezNo ratings yet
- AssocSpringBarnes SpringDesignHandbookDocument199 pagesAssocSpringBarnes SpringDesignHandbookTactical Ivan TacticalNo ratings yet
- 073 - ME6601 Design of Transmission Systems - Anna University 2013 Regulation SyllabusDocument2 pages073 - ME6601 Design of Transmission Systems - Anna University 2013 Regulation SyllabusM A JomahNo ratings yet
- PLSE2015 83 VAEZI Study BehaviourDocument10 pagesPLSE2015 83 VAEZI Study Behavioursamrudh deshmukhNo ratings yet
- Weight Deformation: by Bharath Ram Roll No:4 College of Engineering TrivandrumDocument10 pagesWeight Deformation: by Bharath Ram Roll No:4 College of Engineering TrivandrumBharath RamNo ratings yet
- FEM Analysis On Stiffened Plates Using ANSYS: Bachelor of Technology in Mechanical Engineering byDocument37 pagesFEM Analysis On Stiffened Plates Using ANSYS: Bachelor of Technology in Mechanical Engineering byMarko ŠimićNo ratings yet
- Design and Optimisation With Structural Behaviour Analysis of Central Drum in Mine HoistDocument7 pagesDesign and Optimisation With Structural Behaviour Analysis of Central Drum in Mine HoistSarang MangalekarNo ratings yet
- Design and Manufacturing PDFDocument47 pagesDesign and Manufacturing PDFpatmos666No ratings yet
- Design Manual for Sliding Seismic Isolation SystemsDocument8 pagesDesign Manual for Sliding Seismic Isolation SystemsAngga Fajar SetiawanNo ratings yet
- Analysis and Design of Joist-GirderDocument42 pagesAnalysis and Design of Joist-Girderadnan-651358No ratings yet
- Simulation Lab ManualDocument60 pagesSimulation Lab Manualvensesfrank100% (1)
- Standard Method of Detailing Structural Concrete. A Manual For Best PracticeDocument73 pagesStandard Method of Detailing Structural Concrete. A Manual For Best PracticeLuan Truong Van100% (1)
- Design and Structural Analysis of Spur Gear Using Various MaterialsDocument15 pagesDesign and Structural Analysis of Spur Gear Using Various MaterialsprajeeshNo ratings yet
- Machine Design StiffnessDocument6 pagesMachine Design Stiffnessjaved alamNo ratings yet
- Loads and Load DistributionDocument18 pagesLoads and Load DistributionrammirisNo ratings yet
- Ssec Tip 100Document51 pagesSsec Tip 100Amjad PervazNo ratings yet
- Lec. 1 - IntroductionDocument41 pagesLec. 1 - Introduction20pwmct0739No ratings yet
- Researchpaper Novel Flowchart For Design of Concrete Rectangular BeamsDocument3 pagesResearchpaper Novel Flowchart For Design of Concrete Rectangular Beamsmorphie_blackNo ratings yet
- Sl. No. Title Page No.: B. M. S. College of EngineeringDocument26 pagesSl. No. Title Page No.: B. M. S. College of EngineeringBn SharathNo ratings yet
- 1989, Aiken, Kelly, Tajirian, EERC-89-13Document187 pages1989, Aiken, Kelly, Tajirian, EERC-89-13mingulNo ratings yet
- Introduction To Assembly: An Aerospace Manufacturing PerspectiveDocument26 pagesIntroduction To Assembly: An Aerospace Manufacturing PerspectiveMohanned Saleh MahdiNo ratings yet
- ST1503 020Document7 pagesST1503 020MainãNo ratings yet
- Hertz Contact Stresses ME 250Document13 pagesHertz Contact Stresses ME 250keikunbrNo ratings yet
- Design Development of Fixture For CNC Reviews Practices Future DirectionsDocument11 pagesDesign Development of Fixture For CNC Reviews Practices Future DirectionsRaja PatleNo ratings yet
- Ijri Me 02 0010Document7 pagesIjri Me 02 0010ijripublishersNo ratings yet
- SAP2000 Software Presentation Analyzes StructuresDocument17 pagesSAP2000 Software Presentation Analyzes StructuresShu B HamNo ratings yet
- Introduction To AME and Review Some of The Important Principles of StaticsDocument13 pagesIntroduction To AME and Review Some of The Important Principles of StaticsVishal PawarNo ratings yet
- Nasa STD 7009aDocument72 pagesNasa STD 7009aVishal PawarNo ratings yet
- Theory of MachinesDocument18 pagesTheory of MachinesVishal PawarNo ratings yet
- ME 551 - 08 Flexures (Rev. 1.1)Document15 pagesME 551 - 08 Flexures (Rev. 1.1)Vishal PawarNo ratings yet
- ThermodynamicsDocument5 pagesThermodynamicsVishal PawarNo ratings yet
- Strain Gage Transducer Design and Construction GuideDocument151 pagesStrain Gage Transducer Design and Construction GuideMarcoshhNo ratings yet
- Yoga (Kundalini)Document168 pagesYoga (Kundalini)Alesha Rose100% (25)
- Learn MATLABDocument61 pagesLearn MATLABsayyanNo ratings yet
- Welding WordsDocument4 pagesWelding WordsVishal PawarNo ratings yet
- ForgingDocument8 pagesForgingVishal PawarNo ratings yet
- Powder MetallurgyDocument11 pagesPowder MetallurgyVishal PawarNo ratings yet
- ForgingDocument8 pagesForgingVishal PawarNo ratings yet
- Strength of Materials How Materials Carry Load Basic Modes of Loading A Material: Tension, Compression and ShearDocument2 pagesStrength of Materials How Materials Carry Load Basic Modes of Loading A Material: Tension, Compression and ShearVishal PawarNo ratings yet
- Deflections Due To Loading As Per ACIDocument8 pagesDeflections Due To Loading As Per ACIRishabh LalaNo ratings yet
- 9.9 Diaphragms-With-Interior-Shearwalls PDFDocument4 pages9.9 Diaphragms-With-Interior-Shearwalls PDFnickNo ratings yet
- Copper Pipe and Insulation 2009 Thailand or ChinaDocument18 pagesCopper Pipe and Insulation 2009 Thailand or ChinaLe Manh HieuNo ratings yet
- ACM Hydro Fact SheetDocument2 pagesACM Hydro Fact SheetPetarNo ratings yet
- 13 Concrete Repairs 4CDocument17 pages13 Concrete Repairs 4CMina SaflorNo ratings yet
- Zetkama Fig. 234 SpecsDocument8 pagesZetkama Fig. 234 SpecsAntonio VelardeNo ratings yet
- Experiment # 6 Bernoulli's Theorem Demonstration Apparatus: LABORATORY MANUAL For ENGR2860U-Fluid MechanicsDocument11 pagesExperiment # 6 Bernoulli's Theorem Demonstration Apparatus: LABORATORY MANUAL For ENGR2860U-Fluid MechanicsAbdullah AlshihriNo ratings yet
- Fde 1Document19 pagesFde 1Ivan MarijanovićNo ratings yet
- Asphalt DistressesDocument31 pagesAsphalt DistressesWillard Apeng100% (1)
- TPI FacadeDocument17 pagesTPI FacadeSohel DalalNo ratings yet
- 10.0.9.1 As6052-53-54-55Document1 page10.0.9.1 As6052-53-54-55Gopinath SekarNo ratings yet
- ME 323 Homework 2 ProblemsDocument4 pagesME 323 Homework 2 ProblemsPotatoes123No ratings yet
- PS SB 5510 Eng 05Document23 pagesPS SB 5510 Eng 05fajar abadiNo ratings yet
- Fabrication and Processing of CeramicsDocument14 pagesFabrication and Processing of CeramicsMinJing ParkNo ratings yet
- SJV-EP-IA-011-VP-003 - DATA SHEET - 190117 - 최종Document15 pagesSJV-EP-IA-011-VP-003 - DATA SHEET - 190117 - 최종Jahangir AlamNo ratings yet
- Particle Reinforced and Fiber Reinforced Composites OverviewDocument29 pagesParticle Reinforced and Fiber Reinforced Composites OverviewJoy SueltoNo ratings yet
- Acson Catalogue Air Handling Unit 1201 PDFDocument12 pagesAcson Catalogue Air Handling Unit 1201 PDFfaiz budiNo ratings yet
- Low Cost Housing Report 3 GateDocument71 pagesLow Cost Housing Report 3 GateS.K. Recruiting100% (1)
- Natural Rubber VulcanizationDocument3 pagesNatural Rubber VulcanizationAbraha AbadiNo ratings yet
- Climate-Mahoney's TableDocument22 pagesClimate-Mahoney's TablePandu PandupandaNo ratings yet
- Nitoproof 600: Liquid Applied, Elastomeric, One Coat Waterproofing MembraneDocument3 pagesNitoproof 600: Liquid Applied, Elastomeric, One Coat Waterproofing MembraneFarah HaseenahNo ratings yet
- Girder TrussDocument0 pagesGirder Truss74747474No ratings yet
- Landau Ginzburg TheoryDocument16 pagesLandau Ginzburg TheoryMalik SaifNo ratings yet
- BOQ For Bought Out Items (Condensate & Flash) PDFDocument1 pageBOQ For Bought Out Items (Condensate & Flash) PDFsppatilNo ratings yet
- Whalley, J. The Cast Ell Ani Diadem. 2005Document2 pagesWhalley, J. The Cast Ell Ani Diadem. 2005Trinidad Pasíes Arqueología-ConservaciónNo ratings yet
- RFP-EAH-2016-008 - Section V - Annex C - Technical SpecificationsDocument147 pagesRFP-EAH-2016-008 - Section V - Annex C - Technical SpecificationsKhlif NadaNo ratings yet
- Waterloo RWV-plain-face-adjustable-circular-diffusersDocument6 pagesWaterloo RWV-plain-face-adjustable-circular-diffusersDan RotariNo ratings yet
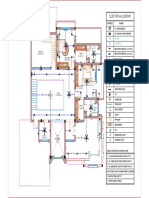
- Electrical legend and layout for bedroomDocument1 pageElectrical legend and layout for bedroomPardhan Lakshay PareekNo ratings yet
- Wattle and DaubDocument6 pagesWattle and DaubdolphinNo ratings yet